Anda mungkin juga menyukai
- Les ProjetsDokumen19 halamanLes Projetsmartin souman moulsiaBelum ada peringkat
- Usart Asm 12f1822Dokumen3 halamanUsart Asm 12f1822Kenzo YCBelum ada peringkat
- Reading From The Input Output Ports of Pic16f877aDokumen5 halamanReading From The Input Output Ports of Pic16f877aEysha qureshiBelum ada peringkat
- FT 180a FC 01asmDokumen14 halamanFT 180a FC 01asmandroid klien01Belum ada peringkat
- Tetra Detector PDFDokumen12 halamanTetra Detector PDFabacadabra3100% (1)
- Stopwatch AssemblyDokumen8 halamanStopwatch AssemblyMr Predator92% (13)
- Assignment 3Dokumen13 halamanAssignment 3abdullahBelum ada peringkat
- PIC16f690 program for pulse displayDokumen5 halamanPIC16f690 program for pulse displayandres zegarraBelum ada peringkat
- ME3241E Cheat SheetDokumen2 halamanME3241E Cheat SheetLaw Zhan HongBelum ada peringkat
- Motor Controller ApplicationDokumen117 halamanMotor Controller ApplicationLuan Nguyen VietBelum ada peringkat
- Codigo de CerraduraDokumen6 halamanCodigo de CerraduraGiordano Matheus Cayu SaucedoBelum ada peringkat
- #INCLUDE P18F452.INC Org 00H N1 EQU 0X25 CLRF TrisbDokumen6 halaman#INCLUDE P18F452.INC Org 00H N1 EQU 0X25 CLRF TrisbVinit SutarBelum ada peringkat
- PIC16F628A ExperimentosDokumen11 halamanPIC16F628A ExperimentosCesar Matos100% (2)
- Jammer022 AsmDokumen6 halamanJammer022 AsmThanhha NguyenBelum ada peringkat
- Prog Test2Dokumen2 halamanProg Test2RAZIQ YOUSSEFBelum ada peringkat
- Code VXL LAB1Dokumen20 halamanCode VXL LAB1buithikiemlien12c2Belum ada peringkat
- 18 FXX 8Dokumen18 halaman18 FXX 8Francisco Manuel Pérez BértoloBelum ada peringkat
- Call Call Call Call CallDokumen8 halamanCall Call Call Call CallVipin Chalakutty CBelum ada peringkat
- CodigosDokumen3 halamanCodigosKaryme Lau GarciaBelum ada peringkat
- Microcontrollers: Dr. Jafar JalladDokumen83 halamanMicrocontrollers: Dr. Jafar JalladGreen HeartBelum ada peringkat
- PIC16F1508 Microcontroller Program DesignDokumen22 halamanPIC16F1508 Microcontroller Program DesignThemba MaviBelum ada peringkat
- FinalDokumen4 halamanFinalDiego Aguazaco LopezBelum ada peringkat
- Pic Micro Controller RS-232 Example Pic16f628Dokumen6 halamanPic Micro Controller RS-232 Example Pic16f628Hack4KixBelum ada peringkat
- Practica # 2 corrimiento de ledDokumen11 halamanPractica # 2 corrimiento de ledPedro Cabrera HernandezBelum ada peringkat
- AD 877 GuiaDokumen3 halamanAD 877 GuiaCarlos RendonBelum ada peringkat
- Programs & References: Chapter - 3Dokumen15 halamanPrograms & References: Chapter - 3Mohit MahajanBelum ada peringkat
- 74HC4017 74HCT4017: 1. General DescriptionDokumen24 halaman74HC4017 74HCT4017: 1. General DescriptionIvan BabicBelum ada peringkat
- PIC ECET410 Project Displays Voltage, Temperature, and Clock TimeDokumen26 halamanPIC ECET410 Project Displays Voltage, Temperature, and Clock TimeOlav YeboahBelum ada peringkat
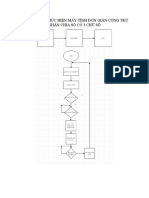
- Bài Tập Lớn Thực Hiện Máy Tính Đơn Giản Cộng Trừ Nhân Chia Số Có 3 Chữ SốDokumen17 halamanBài Tập Lớn Thực Hiện Máy Tính Đơn Giản Cộng Trừ Nhân Chia Số Có 3 Chữ SốPhùng AnBelum ada peringkat
- stepper motor documentation-sampleDokumen8 halamanstepper motor documentation-sampleAshlie JaneBelum ada peringkat
- ProgramsDokumen24 halamanProgramsP HAMSA DATTA0% (1)
- Cable Utp - AsmDokumen5 halamanCable Utp - AsmaledangieBelum ada peringkat
- Program Listing 6Dokumen11 halamanProgram Listing 6Santos ManuelBelum ada peringkat
- Project Doc. Proteus CalculadoraDokumen17 halamanProject Doc. Proteus CalculadoraCARLOS PARRABelum ada peringkat
- Objective: To Perform Serial Communication Between Two MicrocontrollersDokumen5 halamanObjective: To Perform Serial Communication Between Two MicrocontrollersAnb BajwaBelum ada peringkat
- DTMF AsmDokumen38 halamanDTMF AsmvancheBelum ada peringkat
- 4) PIC IO Port ProgrammingDokumen18 halaman4) PIC IO Port ProgrammingArryshah Dahmia100% (2)
- Timer 0 counts from 0 to 99Dokumen32 halamanTimer 0 counts from 0 to 99Lê Duy TấnBelum ada peringkat
- MULTIPLICACION CON PIC16F84Dokumen5 halamanMULTIPLICACION CON PIC16F84Rudolf McBelum ada peringkat
- Tarea 10: Nelson CarreñoDokumen2 halamanTarea 10: Nelson CarreñoNelson Carréño AcostaBelum ada peringkat
- AsemblyDokumen55 halamanAsemblyAshwin Kumar Chandran100% (2)
- Essai Avec INCFSZ Et DECFSZDokumen1 halamanEssai Avec INCFSZ Et DECFSZHiba NajiBelum ada peringkat
- Ericsson RAN GSM TrainingDokumen83 halamanEricsson RAN GSM TrainingMojo Crat100% (6)
- Comando SDokumen240 halamanComando SAndré Aworet AmbourouetBelum ada peringkat
- MP Lab 3Dokumen26 halamanMP Lab 3Wong Wei HaoBelum ada peringkat
- Virtual LCD Display Driver CodeDokumen5 halamanVirtual LCD Display Driver CodeJuanma BecerraBelum ada peringkat
- IPN Lab Digital Systems Bitácora #5Dokumen10 halamanIPN Lab Digital Systems Bitácora #5Enrique MoralesBelum ada peringkat
- Assighnment:-2: Omputer Peripherals & InterfacesDokumen10 halamanAssighnment:-2: Omputer Peripherals & InterfacesAnkur SinghBelum ada peringkat
- PracticaDokumen5 halamanPracticaMorales Oscoy DanielaBelum ada peringkat
- Configure PIC16F877 in HEX and Display ValuesDokumen13 halamanConfigure PIC16F877 in HEX and Display ValuesIrma Leticia Paniagua VasquezBelum ada peringkat
- Automatic Room Light Controller With Visitor CounterDokumen10 halamanAutomatic Room Light Controller With Visitor Counterpincess123Belum ada peringkat
- Exp 4Dokumen5 halamanExp 4Karan PatelBelum ada peringkat
- Fcode 58 en El SytucDokumen6 halamanFcode 58 en El SytucAga MenonBelum ada peringkat
- Hef 4094Dokumen17 halamanHef 4094vasconcelosrvBelum ada peringkat
- Final Record For 3rd SemDokumen96 halamanFinal Record For 3rd SemBirundha Shri MaruthamuthuBelum ada peringkat
- Temperature SensorDokumen10 halamanTemperature SensorMaulik KotechaBelum ada peringkat
- MSP430 iSMAİL KAYA SORULARDokumen8 halamanMSP430 iSMAİL KAYA SORULAREmin DokuzBelum ada peringkat
- LAB-02 Write The Source Code in MPLAB Assembler For Glowing LED On Port B in A Sequence Such As: Time Led1 Led2 Led3 Led4Dokumen12 halamanLAB-02 Write The Source Code in MPLAB Assembler For Glowing LED On Port B in A Sequence Such As: Time Led1 Led2 Led3 Led4Eysha qureshi0% (1)
- FunnelcodeDokumen5 halamanFunnelcodeapi-397709136Belum ada peringkat
- Good Sight Guide 2010Dokumen90 halamanGood Sight Guide 2010Nasir KhanBelum ada peringkat
- Exercise 6Dokumen113 halamanExercise 6Selva GanapathyBelum ada peringkat
- Exercise5 PDFDokumen69 halamanExercise5 PDFSelva GanapathyBelum ada peringkat
- Problem 5: Fighter Jet Vectoring Nozzle. - 1Dokumen72 halamanProblem 5: Fighter Jet Vectoring Nozzle. - 1Selva GanapathyBelum ada peringkat
- ANSYS Advantage V5 I3 2011Dokumen52 halamanANSYS Advantage V5 I3 2011j_c_garcia_dBelum ada peringkat
- Exercise 4Dokumen117 halamanExercise 4raqibappBelum ada peringkat
- Exercise 3: Automobile Suspension Bracket Analysis: ANSYS/ProfessionalDokumen68 halamanExercise 3: Automobile Suspension Bracket Analysis: ANSYS/ProfessionalSelva GanapathyBelum ada peringkat
- CFD Analysis of Newtonian Fluid Flow Phenomena Over A Rotating CylinderDokumen53 halamanCFD Analysis of Newtonian Fluid Flow Phenomena Over A Rotating CylinderSelva GanapathyBelum ada peringkat
- Exercise 2Dokumen52 halamanExercise 2Ram ShewaleBelum ada peringkat
- Exercise1 AnsysTutorialDokumen59 halamanExercise1 AnsysTutorialkhadimshah8520Belum ada peringkat
- Exercise 6Dokumen113 halamanExercise 6Selva GanapathyBelum ada peringkat
- BTH2012 Namiranian PDFDokumen72 halamanBTH2012 Namiranian PDFSelva GanapathyBelum ada peringkat
- Improved Approach For Mobile Robotics in Pattern Recognition 3DDokumen8 halamanImproved Approach For Mobile Robotics in Pattern Recognition 3DSelva GanapathyBelum ada peringkat
- PDFDokumen51 halamanPDFSelva GanapathyBelum ada peringkat
- Exercise 4Dokumen121 halamanExercise 4Selva GanapathyBelum ada peringkat
- Intelligent Line Following Robot: What Exactly Is A Robot?Dokumen6 halamanIntelligent Line Following Robot: What Exactly Is A Robot?Selva GanapathyBelum ada peringkat
- Exercise 3: Automobile Suspension Bracket Analysis: ANSYS/ProfessionalDokumen68 halamanExercise 3: Automobile Suspension Bracket Analysis: ANSYS/ProfessionalSelva GanapathyBelum ada peringkat
- Check ValveDokumen83 halamanCheck Valvechu42Belum ada peringkat
- Improved Approach For Mobile Robotics in Pattern Recognition 3DDokumen8 halamanImproved Approach For Mobile Robotics in Pattern Recognition 3DSelva GanapathyBelum ada peringkat
- Exercise1 AnsysTutorialDokumen59 halamanExercise1 AnsysTutorialkhadimshah8520Belum ada peringkat
- Arredondo11 Bioinspiredmemory Robot ArqDokumen8 halamanArredondo11 Bioinspiredmemory Robot ArqSelva GanapathyBelum ada peringkat
- Exercise 2Dokumen52 halamanExercise 2Ram ShewaleBelum ada peringkat
- Fea Projects PortfolioDokumen12 halamanFea Projects PortfolioSelva GanapathyBelum ada peringkat
- Intelligent Line Following Robot: What Exactly Is A Robot?Dokumen6 halamanIntelligent Line Following Robot: What Exactly Is A Robot?Selva GanapathyBelum ada peringkat
- Arredondo11 Bioinspiredmemory Robot ArqDokumen8 halamanArredondo11 Bioinspiredmemory Robot ArqSelva GanapathyBelum ada peringkat
- Image and Vision Computing: Call For PapersDokumen2 halamanImage and Vision Computing: Call For PapersSelva GanapathyBelum ada peringkat
- Jryde Robotics PRDokumen24 halamanJryde Robotics PRSelva GanapathyBelum ada peringkat
- Signal ConditioningDokumen29 halamanSignal ConditioningSelva GanapathyBelum ada peringkat
- Image and Vision Computing: Call For PapersDokumen2 halamanImage and Vision Computing: Call For PapersSelva GanapathyBelum ada peringkat
- Sensors FinalDokumen91 halamanSensors FinalSelva GanapathyBelum ada peringkat
- Albert PikeDokumen6 halamanAlbert Pikeapi-302575383Belum ada peringkat
- PoiconverterDokumen2 halamanPoiconvertertaco6541Belum ada peringkat
- Basic Concepts of Citrix XenAppDokumen13 halamanBasic Concepts of Citrix XenAppAvinash KumarBelum ada peringkat
- 1 API 653 Exam Mar 2015 MemoryDokumen12 halaman1 API 653 Exam Mar 2015 MemorymajidBelum ada peringkat
- Differentiation SS2Dokumen88 halamanDifferentiation SS2merezemenike272Belum ada peringkat
- Literature Review Marketing StrategyDokumen4 halamanLiterature Review Marketing Strategyc5td1cmc100% (1)
- Safety Data Sheet for Instant AdhesiveDokumen6 halamanSafety Data Sheet for Instant AdhesiveDiego S. FreitasBelum ada peringkat
- Hmdu - EnglishDokumen20 halamanHmdu - EnglishAbdulaziz SeikoBelum ada peringkat
- Educating The PosthumanDokumen50 halamanEducating The PosthumanCatherine BrugelBelum ada peringkat
- Osprey, Men-At-Arms #008 The Black Watch (1971) (-) OCR 8.12Dokumen48 halamanOsprey, Men-At-Arms #008 The Black Watch (1971) (-) OCR 8.12mancini100% (4)
- Tipolo WH Gantt ChartDokumen15 halamanTipolo WH Gantt ChartMayeterisk RBelum ada peringkat
- Larong Lahi Week 15 18Dokumen7 halamanLarong Lahi Week 15 18CJAY SOTELOBelum ada peringkat
- Fancy YarnsDokumen7 halamanFancy Yarnsiriarn100% (1)
- Case Briefing and Case SynthesisDokumen3 halamanCase Briefing and Case SynthesisKai RaguindinBelum ada peringkat
- Pump IntakeDokumen6 halamanPump IntakeAnonymous CMS3dL1T100% (1)
- Amity Online Exam OdlDokumen14 halamanAmity Online Exam OdlAbdullah Holif0% (1)
- Vsip - Info - Ga16de Ecu Pinout PDF FreeDokumen4 halamanVsip - Info - Ga16de Ecu Pinout PDF FreeCameron VeldmanBelum ada peringkat
- Polymer Science: Thermal Transitions in PolymersDokumen20 halamanPolymer Science: Thermal Transitions in Polymerstanveer054Belum ada peringkat
- Broom Manufacture Machine: StartDokumen62 halamanBroom Manufacture Machine: StartHaziq PazliBelum ada peringkat
- SID-2AF User Manual English V3.04Dokumen39 halamanSID-2AF User Manual English V3.04om_zahidBelum ada peringkat
- Soil Testing Lab Results SummaryDokumen2 halamanSoil Testing Lab Results SummaryMd SohagBelum ada peringkat
- Valentine Gifting - Accessories EditionDokumen25 halamanValentine Gifting - Accessories EditionPriyanath PaulBelum ada peringkat
- Haier's Performance Management in Other CulturesDokumen8 halamanHaier's Performance Management in Other CulturesSubhransu SahooBelum ada peringkat
- Cat IQ TestDokumen3 halamanCat IQ TestBrendan Bowen100% (1)
- Rha GGBS 27 4Dokumen12 halamanRha GGBS 27 4KhaDeja MawraBelum ada peringkat
- Defender 90 110 Workshop Manual 5 WiringDokumen112 halamanDefender 90 110 Workshop Manual 5 WiringChris Woodhouse50% (2)
- Laser Engrave Co2 System BJ-1390Dokumen5 halamanLaser Engrave Co2 System BJ-1390Sasa TodorovicBelum ada peringkat
- ES1 Work Panel DatasheetDokumen3 halamanES1 Work Panel DatasheetGerardo Alberto Navarro LopezBelum ada peringkat
- 4MB0 02R Que 20160609 PDFDokumen32 halaman4MB0 02R Que 20160609 PDFakashBelum ada peringkat
- Mathematics Specimen Papers and Mark Schemes UG013054Dokumen102 halamanMathematics Specimen Papers and Mark Schemes UG013054minnie murphy86% (7)