Manual de Prácticas de Laboratorio - Interfaces
Diunggah oleh
Manuel ATJudul Asli
Hak Cipta
Format Tersedia
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
Format Tersedia
Manual de Prácticas de Laboratorio - Interfaces
Diunggah oleh
Manuel ATHak Cipta:
Format Tersedia
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin
MANUAL DE PRCTICAS DE LABORATORIO
INTERFACES (SCF-0418)
Dr. Rolando Palacios Ortega
2011
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
NDICE
Introduccin Temario de la materia 1.- Primera Unidad: Sensores y Transductores 1.1 Antecedentes 1.2 Prcticas de laboratorio 2.- Segunda Unidad: Actuadores Elctricos y Electrnicos 2.1 Antecedentes 2.2 Prcticas de laboratorio 3.- Tercera Unidad: Perifricos estandarizados. 3.1 Antecedentes 3.2 Prcticas de Laboratorio 4.- Cuarta Unidad: Perifricos no estandarizados 4.1 Antecedentes 4.2 Prcticas de laboratorio Bibliografa Apndice: Gua de aprendizaje
1 2
3 10
14 18
24 35
38 44 47 48
Pgina | i
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
INTRODUCCIN
El presente Manual de Prcticas de Laboratorio, est dirigido a estudiantes de la carrera de Ingeniera en Sistemas Computacionales del Sistema Nacional de Educacin Superior Tecnolgica, que cursan la materia de Interfaces. En l se proponen una serie de prcticas que cubren todos los temas del programa de la materia, de tal manera que se complementan de manera integral los aspectos tericos con las actividades en el laboratorio. Los continuos avances de la electrnica han permitido la ampliacin de su campo de aplicaciones, por lo que se hace necesario proporcionar a los alumnos experiencias bajo ambientes controlados, que recreen diferentes contextos de aplicacin de los sistemas de cmputo, incluyendo seales analgicas y digitales, con dispositivos de potencia y frecuencias altas o bajas, hacindolas adecuadas en aplicaciones de tiempo real. Por ello, en la Primera Unidad se tratan los temas de Sensores y Transductores, definiendo cada uno de ellos, pero poniendo atencin en aquellos que por su amplio campo de aplicaciones, disponibilidad y costo, puedan adquirirse fcilmente en el mercado nacional, lo que eventualmente permitir a los estudiantes su adquisicin para la realizacin de las prcticas correspondientes. Permitiendo la incorporacin de habilidades que se integrarn a su formacin, lo que le facilitar instalar, mantener o desarrollar sistemas digitales basados en equipos de cmputo, que incluyan este tipo de dispositivos. En la Segunda Unidad se trata el tema de los Actuadores, poniendo especial atencin en los dispositivos elctricos y electrnicos, que por sus caractersticas pueden utilizarse en acciones de control a partir de un sistema de cmputo. En la Tercera Unidad, se desarrollan aplicaciones utilizando el puerto paralelo de las computadoras personales compatibles con IBM, incluyendo programacin hbrida con lenguaje ensamblador y lenguaje C, estimulando la creatividad de los estudiantes e integrando conocimientos previos adquiridos en materias cursadas anteriormente. Finalmente, en la Cuarta Unidad se utiliza un microcontrolador de la familia PIC de Microchip, lo que permite el uso de una arquitectura tipo RISC, que es ideal para el desarrollo de interfaces de aplicacin especfica, ya que se elaboran programas en lenguaje ensamblador optimizando el uso de los puertos de entrada-salida.
Pgina | 1
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
TEMARIO
1 Sensores 1.1 pticos. 1.1.1 Tipos. 1.1.2 Funcionamiento. 1.1.3 Caractersticas. 1.1.4 Modo de comunicacin. 1.2 Aproximacin. 1.2.1 Tipos. 1.2.2 Funcionamiento. 1.2.3 Caractersticas. 1.2.4 Modo de comunicacin. 2 Actuadores. 2.1 Electrnicos. 2.1.1 Funcionamiento. 2.1.2 Caractersticas. 2.1.3 Modo de comunicacin. 2.2 Mecnicos. 2.2.1 Funcionamiento. 2.2.2 Caractersticas. 2.2.3 Modo de comunicacin. 3 Perifricos estandarizados. 3.1 Tipos. 3.1.1 Serial. 3.1.2 Paralelo. 3.2 Aplicaciones con lenguaje de bajo nivel 3.3 Aplicaciones con programacin hbrida. 4 Perifricos no estandarizados. 4.1 A travs de puertos 4.1.1 Diseo 4.1.2 Programacin. 4.1.3 Aplicacin. 4.2 A travs de interfaz. 4.2.1 Diseo 4.2.2 Programacin. 4.2.3 Aplicacin. 5 Interfaces. 5.1 Conceptos bsicos. 5.2 Clasificacin. 5.3 Programacin de bajo nivel. 5.4 Aplicaciones.
Pgina | 2
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
1.- PRIMERA UNIDAD: SENSORES Y TRANSDUCTORES
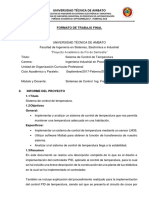
1.1.- ANTECEDENTES SENSOR El trmino sensor se refiere a un elemento que produce en su salida una seal, relacionada con la cantidad que se est midiendo, independientemente del tipo de variable de que se trate.
Figura 1.1 Sensores y variables fsicas
Pgina | 3
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
Figura 1.2 Ejemplos de Sensores
TIPOS DE SENSORES pticos Velocidad y movimiento Fuerza Presin de lquidos Flujo de lquidos Nivel de lquidos Temperatura Desplazamiento, posicin y proximidad Pgina | 4
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO TRANSDUCTOR Es un dispositivo que convierte una variable fsica en una variable elctrica. Las fotoceldas, los termistores y los tacmetros son ejemplos de algunos transductores. La salida elctrica de un transductor es una corriente o voltaje proporcional a la variable fsica que recibe. TIPOS DE TRANSDUCTORES ELECTRNICOS Fotodiodo y Fototransistor Optoaislador/ Optoacoplador Optointerruptor OptoSCR OptoTRIAC Charge Coupled Device (CCD)
Figura 1.3 Transductores Pgina | 5
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
FOTODIODO El fotodiodo es un dispositivo semiconductor de unin-pn cuya regin de operacin se limita a la regin de polarizacin inversa. Un incremento en la intensidad luminosa ocasiona un incremento proporcional en la corriente inversa. Se utiliza en aplicaciones de conteo o de conmutacin, con luz lser o infrarroja.
Figura 1.4 Smbolo del Fotodiodo
FOTOTRANSISTOR El fototransistor posee una unin-pn colector-base fotosensible. De tal manera que la corriente inducida por los efectos fotoelctricos ser la corriente de base del transistor. Si se asigna la notacin I para la corriente de base fotoinducida, la corriente de colector resultante ser:
IChFE I
Las curvas de respuesta de un fototransistor son muy similares a las de un transistor comn y en ellas se aprecia que I C depende de I. Las aplicaciones del fototransistor en instrumentacin y control incluyen lectores pticos, circuitos lgicos, control de iluminacin, indicadores de nivel, sistemas de control remoto y sistemas de conteo.
Pgina | 6
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
Figura 1.5 Ejemplo de Fototransistor OPTOACOPLADOR Tambin llamado Optoaislador, es un dispositivo que contiene tanto un diodo emisor de luz (LED) infrarrojo, como un fotodetector, con una salida que puede ser un fototransistor, un par Darlington, un SCR, o un TRIAC. Estos dispositivos se utilizan para aislar elctricamente etapas digitales de etapas analgicas, para transmisin de datos, o para acoplamiento entre etapas, entre otras aplicaciones.
U1
OPTOCOUPLER_VIRTUAL
Figura 1.6 Smbolo del Optoacoplador
Pgina | 7
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
Figura 1.7 Ejemplo de Optointerruptor
SENSOR DE PROXIMIDAD Este tipo de sensor se puede implementar de varias maneras: Infrarrojo Ultrasonido Electromagntico Capacitivo
La eleccin de cada sensor depender de la aplicacin de que se trate. Por ejemplo, si existe mucho ruido de alta frecuencia, como el que se presenta en ambientes industriales, no se recomienda el sensor de ultrasonido. Por el contrario, si existen campos electromagnticos intensos, estos pueden afectar al sensor electromagntico. Sin embargo, en robtica se utilizan ampliamente los sensores de ultrasonido gracias a su excelente direccionalidad, lo que los hace adecuados para servir de gua a robots mviles. Mientras que los sensores electromagnticos se recomiendan en espacios abiertos, por ejemplo para controlar la apertura y cierre automtico de puertas. En todos los casos se recomienda utilizar seales codificadas, para garantizar que los sistemas no sean afectados por el ruido circundante, que eventualmente puede afectar su funcionamiento. Pgina | 8
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
Movimiento
Figura 1.8 Ejemplo de Sensor de proximidad
Pgina | 9
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
1.2 PRCTICAS DE LABORATORIO MATERIA: INTERFACES CLAVE: SCF-0418 EQUIPO No. Fecha:
PROFESOR: Dr. Rolando Palacios Ortega
PRCTICA # 1.- Sensores y Transductores OBJETIVO(S): Identificar las caractersticas de los sensores y transductores Aplicar sensores infrarrojos como detectores de paso y proximidad. MATERIAL: Protoboard, LED infrarrojo, fototransistor infrarrojo, Timer NE555, Amplificador Operacional LM358, 2 diodos 1N4147, 2 LEDs visibles, Potencimetros 1 M, 10 K, 2 resistencias 10K, 470 , 330 , 220 , Capacitores: 2.2 Fd, 1 Fd, 0.68 Fd, 0.1 Fd, alambre 22 AWG, caimanes, agregar componentes del monostable. EQUIPO: 1 Multmetro Digital para mediciones de AC, DC y estados lgicos. 1 Fuente de Alimentacin Regulada +5 VCD, + 12 VCD 1 Osciloscopio 200 Mhz. 2 canales HERRAMIENTA: 1 Pinzas de punta para electrnica. 1 Pinzas de corte para electrnica.
ACTIVIDADES: 1.- Probar cada circuito en Electronics Workbench u otro simulador de circuitos. 2.- Armar cada circuito y probar cada etapa de manera independiente. 3.- Verificar que las conexiones y la alimentacin sean correctas. 4.- Pueden utilizar la misma fuente o fuentes independientes de +12VCD o +5VCD. 5.- El Astable debe generar onda cuadrada.
DIAGRAMAS: CIRCUITO #1.- Detector de paso. El LED visible conmuta a la misma frecuencia del astable y se apaga cuando el objeto bloquea el paso de la luz infrarroja.
LED infrarrojo Fototransistor LED visible
Astable
Amplificador
Objeto en movimiento
Pgina | 10
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
CIRCUITO #2.- Detector de proximidad. El LED visible permanece apagado hasta que el objeto est lo bastante cerca para reflejar la luz infrarroja, en ese momento conmuta a la misma frecuencia del astable.
LED infrarrojo
Astable
Objeto en movimiento
Amplificador
Luz infrarroja
LED visible
Fototransistor
CIRCUITO #3.- Detector de paso. El LED visible permanece apagado hasta que el objeto impide el paso de la luz infrarroja, en ese momento se activa el monostable, el LED permanece encendido durante 3 segundos y se vuelve a apagar.
LED infrarrojo Fototransistor LED visible
Fuente continua
Amplificador
Monostable 3 segundos
Objeto en movimiento
Pgina | 11
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
CIRCUITO #4.- Detector de proximidad. El LED visible permanece apagado hasta que el objeto est lo bastante cerca para reflejar la luz infrarroja, en ese momento el LED permanece encendido durante 10 segundos y se vuelve a apagar.
LED infrarrojo
Fuente continua
Objeto en movimiento
Monostable 10 segundos
LED visible
Amplificador
Luz infrarroja
Fototransistor
Formato del Reporte:
1. Portada 2. ndice de Contenido 3. Resumen (media cuartilla) 4. Abstract (Resumen en Ingls) 5. Introduccin (5 a 10 cuartillas) 6. Desarrollo terico (10 a 15 cuartillas) 7. Desarrollo Prctico (10 a 15 cuartillas) 8. Conclusiones (3 cuartillas) 9. Bibliografa (5 a 10 libros o pginas) 10. Glosario (Definicin de los trminos utilizados) 11. Anexos (Hojas de datos de los dispositivos)
Pgina | 12
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
Multmetro Digital
Pinzas de corte
Pinzas de Punta
Protoboard
Bibliografa de la prctica: 1. Bolton, William (2006). Mecatrnica. Ed. Alfaomega. Mxico. 2. Boylestad y Nashelsky (2003). Electrnica: Teora de Circuitos y Dispositivos Electrnicos. Ed. Prentice-Hall. Mxico. 3. Malvino, Albert Paul (2000). Principios de Electrnica. Ed. McGraw-Hill. Mxico. 4. Sabri, Cetinkunt (2007). Mecatrnica. Ed. Patria. Mxico 5. Tocci, Ronald (2003). Sistemas Digitales. Principios y Aplicaciones. Ed. Pearson. Mxico.
Pgina | 13
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
2.- SEGUNDA UNIDAD: ACTUADORES ELCTRICOS Y ELECTRNICOS
2.1 ANTECEDENTES ACTUADORES Los actuadores son los elementos de los sistemas de control que transforman la salida de un microprocesador, microcontrolador o controlador en una accin de control para una mquina o dispositivo. Por ejemplo, puede ser necesario transformar una salida elctrica del controlador en un movimiento lineal que desplaza una carga. Otro ejemplo sera cuando la salida elctrica del controlador debe transformarse en una accin que controle la cantidad de lquido que pasa por una tubera. TIPOS DE ACTUADORES Neumticos e Hidrulicos Elctricos Electrnicos Mecnicos
ACTUADORES NEUMTICOS Con frecuencia las seales neumticas se utilizan para manejar elementos finales de control, incluso cuando el sistema de control es elctrico. Esto se debe a que con esas seales es posible accionar vlvulas grandes y otros dispositivos y otros dispositivos de control que requieren mucha potencia para mover cargas considerables. La principal desventaja de los sistemas neumticos es la compresibilidad del aire. Las seales hidrulicas se usan en dispositivos de control de mucho mayor potencia, pero son ms costosas que los sistemas neumticos y hay riesgos asociados con fugas de aceite que no ocurren con fugas de aire. ACTUADORES ELCTRICOS Dispositivos de conmutacin de potencia, como relevadores, interruptores mecnicos e interruptores de estado slido (diodos, tiristores y transistores), en los Pgina | 14
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO que la seal de control enciende o apaga un dispositivo elctrico, que podr ser un calentador o un motor. Dispositivos tipo solenoide, en los cuales una corriente que pasa por un solenoide acciona un ncleo de hierro dulce, por ejemplo una vlvula hidrulica operada por solenoide, donde la corriente de control que pasa por el solenoide se utiliza para regular un flujo hidrulico o neumtico. Sistemas motrices, por ejemplo, motores de corriente directa (cd), motores de corriente alterna (ca) o motores de pasos, en los cuales la corriente que pasa por los devanados del motor produce un movimiento de rotacin. RELEVADOR Son dispositivos actuadores elctricos cuya accin consiste en abrir o cerrar interruptores para habilitar o inhabilitar otros dispositivos, otros actuadores u otros sistemas.
Figura 2.1 Ejemplo de relevador
ACTUADORES ELECTRNICOS Los actuadores electrnicos son dispositivos o circuitos electrnicos que se conectan a la salida de un sistema digital, computadora o microcontrolador; a travs de los cuales se realiza alguna accin sobre una carga, habilitndola o inhabilitndola al proporcionarle, o quitarle, el voltaje o la corriente adecuados para su operacin. Como ejemplos se pueden mencionar a los transistores, SCR y TRIACs, entre otros OPTOSCR Y OPTOTRIAC Estos dispositivos tienen caractersticas muy similares a las del fototransistor, ya que su operacin depende de la incidencia de luz en la compuerta (Gate), lo que Pgina | 15
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO elimina la necesidad de circuitos de disparo, simplificando su aplicacin y permitiendo su uso en circuitos digitales para controlar directamente cargas analgicas. Los actuadores pticos tienen la ventaja de acoplar y aislar elctricamente las etapas digitales de las analgicas. Evitando la interaccin entre circuitos de baja potencia y los de alta potencia.
Figura 2.2 Smbolos del OptoSCR y OptoTRIAC
ACTUADORES MECNICOS Son dispositivos que se pueden considerar convertidores de movimiento, dado que transforman el movimiento de una forma a otra. Por ejemplo, con un actuador mecnico, un movimiento lineal se puede convertir en un movimiento rotacional; un movimiento en una direccin convertirse en uno con otra direccin en ngulo recto respecto al primero. Tambin es posible transformar un movimiento lineal alterno en uno rotacional, como en el caso del motor de combustin interna, donde el movimiento alterno de los pistones se convierte en el del cigeal y este lo transfiere el eje de la transmisin. Entre los elementos mecnicos estn los mecanismos de barras articuladas, levas, engranes, cremalleras, cadenas y correas de transmisin, entre otras. Por ejemplo, el arreglo engrane-cremallera convierte el movimiento rotacional en uno lineal. Los engranes cnicos transmiten movimiento rotacional en un ngulo de 90. Las levas y los mecanismos son tiles para obtener movimientos que varen en la forma que se desea.
Pgina | 16
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO Muchos de los efectos que antes se obtenan con el uso de mecanismos en la actualidad se logran mediante sistemas de microcontroladores. Antes en las lavadoras domsticas se utilizaban levas montadas en un eje rotacional para lograr una secuencia de acciones sincronizadas como abrir una vlvula para dejar pasar agua al tambor, cerrar el suministro de agua, encender un calentador, entre otras acciones; en las lavadoras modernas se programa un microcontrolador o sistema embebido para que produzca las salidas deseadas en la secuencia requerida. Si bien la electrnica hoy da se utiliza en forma generalizada para desempear diversas funciones que antes se realizaban con actuadores mecnicos, stos todava son tiles para llevar a cabo funciones como las que se mencionan a continuacin. TIPOS DE ACTUADORES MECNICOS Amplificacin de fuerzas: palancas Cambio de velocidad: engranes Transferencia de rotacin de un eje a otro: banda sncrona Transformacin del movimiento: levas
Pgina | 17
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO 2.2 PRCTICAS DE LABORATORIO MATERIA: INTERFACES CLAVE: SCF-0418 EQUIPO No. Fecha:
PROFESOR: Dr. Rolando Palacios Ortega
PRCTICA # 2.- Actuadores Elctricos y Electrnicos OBJETIVO(S): Analizar las caractersticas de los Actuadores Elctricos y Electrnicos Aplicar Actuadores Elctricos y Electrnicos como dispositivos de control. Evaluar el desempeo de los Actuadores Elctricos y Electrnicos. MATERIAL: Protoboard, Relevador 2P2T 12 VCD, OptoTRIAC MOC 3011, Transistor 2N3904, motor de 12VCD, Foco 40 watts CA, socket para foco, clavija CA con cable, Fototransistor con filtro de luz de da, TRIAC 8A, alambre 22 AWG, cable dplex de 16 AWG, caimanes, cinta de aislar o Thermofit, componentes de la prctica #1. EQUIPO: 1 Multmetro Digital para mediciones de AC, DC y estados lgicos. 1 Fuente de Alimentacin Regulada +5 VCD, + 12 VCD 1 Osciloscopio 200 Mhz. 2 canales HERRAMIENTA: 1 Pinzas de punta para electrnica. 1 Pinzas de corte para electrnica.
ACTIVIDADES: 1.- Los circuitos ACTUADORES se conectan a la salida de los detectores de paso y proximidad 2.- Los ACTUADORES y CARGAS de 12VCD se conectan a la misma fuente. 3.- Las CARGAS de CA se conectan a la lnea de corriente alterna. 4.- Al trabajar con corriente alterna hgalo con mucho cuidado, evite cortos y sufrir una descarga elctrica. SI TIENE DUDAS, REVISE Y PREGUNTE.
DIAGRAMAS: CIRCUITO DETECTOR #1.- Detector de paso. El LED visible permanece apagado hasta que el objeto impide el paso de la luz infrarroja, en ese momento se activa el monostable, el ACTUADOR permanece activo durante 3 segundos y se vuelve a apagar.
LED infrarrojo Fototransistor ACTUADOR
Fuente continua
Acondicionador de seal
Monostable 3 segundos
Objeto en movimiento
Pgina | 18
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
CIRCUITO ACTUADOR #1.- Su entrada se conecta a la salida del MONOSTABLE del detector de paso, el transistor inversor activa el relevador de 12VCD, el FOCO se conecta a la lnea de CORRIENTE ALTERNA y permanece encendido durante el retardo del MONOSTABLE.
CIRCUITO ACTUADOR #2.- Su entrada se conecta a la salida del MONOSTABLE del detector de paso, el OPTOTRIAC dispara al TRIAC y el FOCO se conecta a la lnea de CORRIENTE ALTERNA, permanece encendido durante el retardo del MONOSTABLE.
Pgina | 19
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
CIRCUITO DETECTOR #2.- Detector de proximidad. El LED visible permanece apagado hasta que el objeto est lo bastante cerca para reflejar la luz infrarroja, en ese momento el ACTUADOR permanece activo durante 10 segundos y se vuelve a apagar.
LED infrarrojo
Fuente continua
Objeto en movimiento
Monostable 10 segundos
ACTUADOR
Acondicionador de seal
Luz infrarroja
Fototransistor
CIRCUITO ACTUADOR #3.- Su entrada se conecta a la salida del MONOSTABLE del detector de proximidad, el transistor inversor activa el relevador de 12VCD, el BUZZER se conecta a la fuente de 12VCD y permanece zumbando durante el retardo del MONOSTABLE.
Pgina | 20
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
CIRCUITO ACTUADOR #4.- Su entrada se conecta a la salida del MONOSTABLE del detector de proximidad, el transistor inversor activa el relevador de 12VCD, el MOTOR DE CORRIENTE DIRECTA se conecta a la fuente de 12VCD y permanece girando durante el retardo del MONOSTABLE.
CIRCUITO ACTUADOR #5.- Durante el da el FOTOTRANSISTOR est saturado, por lo que la salida del COMPARADOR est en alto, por lo que se produce una corriente en la base del TRANSISTOR y se satura, produciendo una corriente de colector que provoca que el RELEVADOR se active, manteniendo apagada la lmpara. Si hay oscuridad, en el emisor del fototransistor se encuentra un voltaje menor que el establecido en el preset del comparador, por lo que la salida de ste est en bajo, provocando que el RELEVADOR quede inactivo, encendiendo la lmpara.
Pgina | 21
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
Formato del Reporte:
1. Portada 2. ndice de Contenido 3. Resumen (media cuartilla) 4. Abstract (Resumen en Ingls) 5. Introduccin (5 a 10 cuartillas) 6. Desarrollo terico (10 a 15 cuartillas) 7. Desarrollo Prctico (10 a 15 cuartillas) 8. Conclusiones (3 cuartillas) 9. Bibliografa (5 a 10 libros o pginas) 10. Glosario (Definicin de los trminos utilizados) 11. Anexos (Hojas de datos de los dispositivos)
Bibliografa de la prctica: 1. Bolton, William (2006). Mecatrnica. Ed. Alfaomega. Mxico. 2. Boylestad y Nashelsky (2003). Electrnica: Teora de Circuitos y Dispositivos Electrnicos. Ed. Prentice-Hall. Mxico. 3. Malvino, Albert Paul (2000). Principios de Electrnica. Ed. McGraw-Hill. Mxico. 4. Sabri, Cetinkunt (2007). Mecatrnica. Ed. Patria. Mxico 5. Tocci, Ronald (2003). Sistemas Digitales. Principios y Aplicaciones. Ed. Pearson. Mxico.
Pgina | 22
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
Fototransistor con filtro de luz de da OptoTRIAC MOC3031
Relevador 2P2T 12 VCD RHL-2-12D-10H
BUZZER PULSO RPIDO BGD35CIR
TRIAC 8A BTA08-600B
Ventilador de 4 pulgadas 12VCD VN4-012P
Pgina | 23
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
3.- TERCERA UNIDAD: PERIFRICOS ESTANDARIZADOS.
3.1 ANTECEDENTES INTERFAZ NORMALIZADA TIPO SERIE Existen dos formas de comunicacin serie: la sncrona y la asncrona. En la comunicacin sncrona, adems de la lnea sobre la que se transfieren los datos, se necesita otra que contenga pulsos de reloj que indiquen cuando un dato es vlido; la duracin del bit est determinada por la duracin del pulso de sincrona. En la comunicacin asncrona, los pulsos de reloj no son necesarios y se utilizan otros recursos para realizar la lectura-escritura de los datos; la duracin de cada bit est determinada por la velocidad con la cual se realiza la transferencia de datos.
Figura 3.1 Estructura de un carcter que se transmite en serie En los circuitos digitales, cuyas distancias son relativamente cortas, se pueden manejar transmisiones en niveles lgicos TTL, pero cuando las distancias aumentan, estas seales tienden a degradarse debido al efecto capacitivo de los conductores y su resistencia elctrica. El efecto se incrementa a medida que se incrementa la velocidad de transmisin. Todo esto origina que los datos recibidos no sean iguales a los transmitidos, lo que no se puede permitir en una transferencia de datos. Una de las soluciones ms inmediatas a este tipo de situaciones es aumentar los mrgenes de voltaje Pgina | 24
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO con que se transmiten los datos, de tal manera que las perturbaciones causadas se puedan minimizar e incluso ignorar. Ante la gran variedad de equipos, sistemas y protocolos que existen surgi la necesidad de un acuerdo que permitiera que los equipos de diversos fabricantes pudieran comunicarse entre s. A principios de loa aos sesenta se desarrollaron varias normas que pretendan hacer compatibles los equipos, pero en 1962 se public la que se convirti en la ms popular: la norma RS-232 Esta norma define la interfaz mecnica, las caractersticas, las terminales, las seales y los protocolos que deba cumplir la comunicacin serie. La norma ha sufrido algunas revisiones, como la RS-232C en 1969 y la EIA/TIA232E en 1991.
Figura 3.2 Niveles de voltaje RS-232 Todas las normas RS-232 cumplen bsicamente con los mismos niveles de voltaje: Uno lgico: entre -5V y -15V en el transmisor entre -3V y -25V en el receptor Cero lgico: entre 5V y 15V en el transmisor entre 3V y 25 V en el receptor
Por lo tanto, se requieren dispositivos que permitan convertir niveles TTL a niveles RS-232 y viceversa. Los primeros dispositivos utilizados fueron los drivers Pgina | 25
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO MC1488 y los receivers MC1489 de Motorola, de los que se desarrollaron versiones mejoradas como los SN75188, SN75189 de Texas Instruments y algunos similares de otros fabricantes. Todos los dispositivos mencionados necesitan tres voltajes diferentes para su operacin cuando el equipo acta como transmisor y receptor, lo cual no representa ningn problema en computadores tipo PC, ya que se dispone de estos voltajes en la fuente. Sin embargo, cuando se trata de sistemas de microcontroladores, en los cuales el espacio es muy importante y no se puede disponer de voltajes diferentes a 5 volts, estos circuitos integrados no se recomiendan.
Figura 3.3 Representacin de la Interfaz RS-232
Los estndares de la interfaz RS-232 permiten una separacin mxima de 15 metros a una velocidad de transmisin no mayor de 9.6 kbps (kilo bits por segundo). Sin embargo, se realizan conexiones a distancias mayores sin problema alguno. Por lo general, en la interfaz RS-232 se utilizan cable multipar o cable plano con un slo conductor como referencia de tierra. El ruido que se capta a travs de la lnea an puede originar problemas. Para reducir el efecto se suele conectar un condensador en paralelo con la salida del circuito transmisor.
Pgina | 26
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
INTERFAZ NORMALIZADA TIPO PARALELO La interfaz Centronics implementada en el puerto paralelo usa dos conectores, uno tipo-D de 25 terminales ubicado en la parte posterior de la PC y otro tipoCentronics de 36 terminales ubicado en la impresora. Adems, el puerto paralelo puede trabajar como transmisor en todos sus bits de datos (D0-D7). Mientras que sus lneas de control pueden emplearse como receptores de datos. Esto permite su uso con dispositivos diferentes a las impresoras, como lectores de disco y protectores de programas, entre otros, que pueden conectarse y trabajar con el puerto paralelo.
Pin 1 2 3 4 5 6 7 8 9 10 11 12 13
Descripcin -Strobe +Data bit 0 +Data bit 1 +Data bit 2 +Data bit 3 +Data bit 4 +Data bit 5 +Data bit 6 +Data bit 7 -Acknowledge +Busy +Paper end +Online
I/O Out Out Out Out Out Out Out Out Out In In In In
Pin 14 15 16 17 18 19 20 21 22 23 24 25
Descripcin -Auto feed -Error -Reset Printer -Select Printer -Data bit 0 (GND) -Data bit 1 (GND) -Data bit 2 (GND) -Data bit 3 (GND) -Data bit 4 (GND) -Data bit 5 (GND) -Data bit 6 (GND) -Data bit 7 (GND)
I/O Out In Out Out In In In In In In In In
Figura 3.4 Lneas del puerto paralelo
Pgina | 27
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
Figura 3.5 Conectores IEEE-1284
LPT
LPT 1 LPT 2
Puertos E/S
378H, 379H, 37AH 278H, 279H, 27AH
IRQ
IRQ5 IRQ7
Figura 3.6 Direcciones e Interrupciones de los Puertos Paralelo Estndar
Pgina | 28
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
Terminales del conector DB25
Bits del Bus de Datos
Figura 3.7 Puerto de datos que conecta a los bits (D0-D7) con las terminales (2-9) del conector DB-25.
Puerto 379H
Bits
ERROR (1= no error) ONLINE (1= online) PAPER (1= out of paper) ACK (1= acknowledge) BUSY (1= printer not busy)
Figura 3.8 Registro de estados que reporta las condiciones de la impresora a travs de seales como BUSY y ERROR, entre otras.
Pgina | 29
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
Puerto 37AH
Bits
Bidireccional (0= output, 1= input) IRQ (1= enabled) DSL (1= select printer) #INI (1= initialize printer) ALF (1= line feed by printer) STR (pulse high ti print)
Figura 3.9 Registro de control que reporta y controla el estado de la impresora.
APLICACIONES CON PROGRAMACIN HBRIDA Se entiende por programacin hbrida al desarrollo de aplicaciones que integran elementos en lenguaje de alto nivel y elementos en lenguaje ensamblador. El objetivo de esta combinacin es aprovechar las mejores carctersticas de cada nivel. Mientras que el alto nivel facilita el desarrollo de interfaces grficas de usuario, el ensamblador permite un mejor control de los dispositivos de la computadora, adems de su velocidad. Mientras que muchos programadores prefieren desarrollar programas completos en Lenguaje Ensamblador, otros optan por hacer todos sus programas en alto nivel, haciendo uso de rutinas en Ensamblador slo cuando requieren hacer control de bajo nivel o cuando necesitan optimizar el cdigo. Por el contrario, algunos otros prefieren desarrollar el programa principal en Ensamblador, haciendo uso de rutinas en alto nivel ocasionalmente, utilizando su capacidad de manejo de libreras y estructuras ms complejas. DIRECTIVAS DE COMPILACIN HBRIDA La programacin modular se construye tpicamente a partir de varias secciones de cdigo independientes, llamados mdulos. El compilador procesa cada uno de esos mdulos de manera independiente, y el enlazador (LINKER) pone las piezas resultantes juntas para crear un archivo ejecutable. Pgina | 30
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
Es muy importante conocer cmo definir e incluir todos los archivos y libreras que se deben considerar antes de enlazarlos utilizando el LINKER. Un aspecto que se debe tomar en cuenta se refiere al uso de variables y procedimientos en todos los mdulos del programa. Ensambladores como MASM y TASM proporcionan varias directivas que permiten definir smbolos y libreras que se pueden utilizar globalmente, as como variables comunes, para las cuales el LINKER reserva espacio. Tambin se debe tener cuidado acerca de como nombrar los smbolos, dado que los diferentes lenguajes tienen requerimientos particulares. DIRECTIVAS PARA DEFINICIN DE DATOS DB (definir byte), DW (definir palabra), DD (definir doble palabra), DQ (definir cudruple palabra), DT (definir 10 bytes): sirven para declarar las variables, asignndolas un valor inicial: ao DW 1991 mes DB 12 numerazo DD 12345678h texto DB "Hola",13,10 Se pueden definir nmeros reales de simple precisin (4 bytes) con DD, de doble precisin (8 bytes) con DQ y reales temporales (10 bytes) con DT; todos ellos con el formato empleado por el coprocesador. Para que el ensamblador interprete el nmero como real ha de llevar el punto decimal: temperatura DD 29.72 espaoles91 DQ 38.9E6 Con el operando DUP pueden definirse estructuras repetitivas. Por ejemplo, para asignar 100 bytes a cero y 25 palabras de contenido indefinido (no importa lo que el ensamblador asigne): ceros DB 100 DUP (0) basura DW 25 DUP (?) Se admiten tambin los anidamientos. El siguiente ejemplo crea una tabla de bytes donde se repite 50 veces la secuencia 1,2,3,7,7: tabla DB 50 DUP (1, 2, 3, 2 DUP (7)) DIRECTIVAS DE DEFINICIN DE SMBOLOS. EQU (EQUivalence): Asigna el valor de una expresin a un nombre simblico fijo: olimpiadas EQU 1992
Pgina | 31
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO Donde olimpiadas ya no podr cambiar de valor en todo el programa. Se trata de un operador muy flexible. Es vlido hacer: edad EQU [BX+DI+8] MOV AX,edad = (signo '='): asigna el valor de la expresin a un nombre simblico variable: Anlogo al anterior pero con posibilidad de cambiar en el futuro. Muy usada en macros. num = 19 num = pepe + 1 dato = [BX+3] dato = ES:[BP+1] DIRECTIVAS DE CONTROL DEL ENSAMBLADOR. ORG (ORiGin): pone el contador de posiciones del ensamblador, que indica el offset donde se deposita la instruccin o dato, donde se indique. En los programas COM (que se cargan en memoria con un OFFSET 100h) es necesario colocar al principio un ORG 100h, y un ORG 0 en los controladores de dispositivo (aunque si se omite se asume de hecho un ORG 0). END [expresin]: indica el final del archivo fuente. Si se incluye, expresin indica el punto donde arranca el programa. Puede omitirse en los programas EXE si stos constan de un slo mdulo. En los programas COM es preciso indicarla y, adems, la expresin -realmente una etiquetadebe estar inmediatamente despus del ORG 100h.
Cuando se de nombre a smbolos que se planee utilizar externamente, se debe recordar el uso de las especificaciones del lenguaje particular que se va a utilizar, por ejemplo, en C/C++ el nombre debe iniciar con guin bajo ( _ ), mientras que el resto del nombre debe utilizar minsculas ( _nombre). Cuando se especifique un lenguaje en la directiva MODEL o en la declaracin PROC, o declare el lenguaje en una declaracin de smbolos PUBLIC, Turbo Assembler usar automticamente las convenciones apropiadas para nombres para ese lenguaje. SYSCALL especifica las convenciones de llamadas de C, pero no los nombres de smbolos. STDCALL usa las convenciones de C para procedimientos con argumentos variables. STDCALL siempre usa las convenciones para nombres de C.
Pgina | 32
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
El interruptor /ml indica al TASM a tratar todos los nombres de smbolos como casos sensibles. El interruptor indica al TASM que trate slo a los smbolos externos o pblicos como casos sensibles y que todos los otros smbolos dentro del archivo fuente sean maysculas. Cuando se declara un smbolo como pblico, se trata de hacerlo accesible desde otros mdulos. Por ejemplo, los siguientes tipos de smbolos pueden ser pblicos: Nombres de variables de datos. Etiquetas de programa. Constantes numricas definidas con EQU. Se puede usar la directiva PUBLIC para definir smbolos pblicos: PUBLIC [lenguaje] smbolo
Observe que para usar smbolos pblicos fuera del mdulo donde fueron definidos, se debe usar la directiva EXTRN. Los smbolos externos (EXTRN) son aquellos definidos fuera del mdulo. Estos smbolos se deben haber declarado usando la directiva PUBLIC. EXTRN [lenguaje] nombre [cuenta1] : tipo_complejo [: cuenta2]
Los smbolos globales (GLOBAL) funcionan igual que los smbolos pblicos, sin tener que especificar PUBLIC o EXTRN. Si la variable est definida en el mdulo, funciona como PUBLIC. De otra manera funciona como EXTRN. Se puede utilizar la directiva GLOBAL para definir smbolos globales. GLOBAL tiene la misma sintaxis que PUBLIC o EXTRN y adems permite tener un archivo tipo INCLUDE incluido por todos los archivos fuente. El archivo INCLUDE contiene todos los datos compartidos definidos como smbolos globales. Cuando se hace referencia a estos datos en cada mdulo, la definicin GLOBAL acta como la directiva EXTRN, describiendo cmo est definido el dato en otro mdulo. Se debe definir un smbolo como GLOBAL antes de usarlo en el archivo fuente. Adems, se debe observar que cada argumento de GLOBAL acepta la misma sintaxis de un argumento de EXTRN. Ejemplo: GLOBAL X:Word, Y:Byte X DW 0 ; X es pblico Mov Al, Y ; Y es externo Pgina | 33
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
Las variables comunes (COMM) funcionan como las variables externas, con una diferencia importante: las variables comunes son asignadas por el LINKER. Las variables comunes se comportan como variables globales, pero no se les pueden asignar valores iniciales. Estas variables no inicializadas se pueden referenciar desde mltiples mdulos. Una desventaja es que no se almacenan en localidades de memoria consecutivas. COMM definicin [, definicin] ... [distancia] [lenguaje] nombre: tipo
Ejemplos: COMM COMM COMM buffer:BYTE:512 abc[45]:WORD:10 FAR abc[45]:WORD:10
Cuando se necesita utilizar repetidas veces una rutina, se puede almacenar en un archivo de biblioteca y utilizar la directiva INCLUDELIB, por omisin se considera la extensin .LIB INCLUDELIB nombre_archivo
Pgina | 34
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO 3.2 PRCTICAS DE LABORATORIO MATERIA: INTERFACES CLAVE: SCF-0418 EQUIPO No. Fecha:
PROFESOR: Dr. Rolando Palacios Ortega
PRCTICA # 3.- Aplicaciones con Sensores, Actuadores y Programacin Hbrida. OBJETIVO(S): Disear e implementar un sistema de seguridad utilizando una interfaz estandarizada de las computadoras personales. Desarrollo de software de supervisin y control utilizando programacin hbrida Aplicar Sensores y Actuadores en sistemas de supervisin y control. MATERIAL: Detector de paso, Detector de luz de da, interruptor de palanca, (2) Actuador con TRIAC, Actuador con Relevador, Foco, Zumbador, Motor. EQUIPO: 1 Computadora personal con puerto paralelo 1 Multmetro Digital para mediciones de AC, DC y estados lgicos. 1 Fuente de Alimentacin Regulada +5 VCD, + 12 VCD HERRAMIENTA: 1 Pinzas de punta para electrnica. 1 Pinzas de corte para electrnica. 1 Juego de caimanes. ACTIVIDADES: 1.- Disear la tabla de estados lgicos. 2.- Desarrollar el programa principal utilizando un lenguaje de alto nivel. 3.- Desarrollar rutinas de entrada y salida utilizando lenguaje ensamblador. 4.- Probar el sistema utilizando Sensores de entrada y Actuadores como salida. 5.- En la pantalla de la computadora personal se deben visualizar los estados correspondientes a las entradas y salidas.
DIAGRAMAS: CIRCUITO #1.- Durante el da, cuando se activa el detector de paso y la alarma est apagada, el sistema activa el motor para abrir la puerta y lo apaga despus de 10 segundos.. Durante el da, cuando se activa el detector de paso y la alarma est encendida, NO se activa el motor para abrir la puerta, se activa el zumbador y permanece activo hasta que se apaga la alarma. Durante la noche, cuando se activa el detector de paso y la alarma est apagada, el sistema activa el motor para abrir la puerta, enciende el foco y los apaga despus de 10 segundos.
Pgina | 35
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO Durante la noche, cuando se activa el detector de paso y la alarma est encendida, NO se activa el motor para abrir la puerta, enciende el foco, activa el zumbador y los apaga hasta que se apaga la alarma.
Detector de paso Puerto Paralelo Computadora Personal Buffer no inversor Buffer no inversor
Motor
Detector de luz de da
Foco
Encendido Apagado de alarma
Zumbador
Figura 1.- Diagrama a bloques del sistema
NOTA: Recuerde que las entradas y salidas del puerto paralelo manejan niveles TTL de +5VCD. Programa principal en alto nivel
Entradas
Control
Salidas
Pantalla
Figura 2.- Diagrama a bloques del programa de supervisin y control
Pgina | 36
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
Formato del Reporte:
1. Portada 2. ndice de Contenido 3. Resumen (media cuartilla) 4. Abstract (Resumen en Ingls) 5. Introduccin (5 a 10 cuartillas) 6. Desarrollo terico (10 a 15 cuartillas) 7. Desarrollo Prctico (10 a 15 cuartillas) 8. Conclusiones (3 cuartillas) 9. Bibliografa (5 a 10 libros o pginas) 10. Glosario (Definicin de los trminos utilizados) 11. Anexos (Hojas de datos de los dispositivos)
Bibliografa de la prctica:
1. Abel P. (1996). Lenguaje Ensamblador y programacin para PC IBM y compatibles. Prentice-Hall. Mxico 2. Barry, B. Brey. (2006) Microprocesadores intel. Pearson 7 Edicin. 3. Bolton, William (2006). Mecatrnica. Ed. Alfaomega. Mxico. 4. Boylestad y Nashelsky (2003). Electrnica: Teora de Circuitos y Dispositivos Electrnicos. Ed. Prentice-Hall. Mxico. 5. Malvino, Albert Paul (2000). Principios de Electrnica. Ed. McGraw-Hill. Mxico. 6. Sabri, Cetinkunt (2007). Mecatrnica. Ed. Patria. Mxico 7. Stallings, W. (1997). Organizacin y Arquitectura de Computadoras . 4ta Edicin. Editorial Prentice Hall. Madrid, Espaa. 8. Tocci, Ronald (2003). Sistemas Digitales. Principios y Aplicaciones. Ed. Pearson. Mxico.
Pgina | 37
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
4.- CUARTA UNIDAD: PERIFRICOS NO-ESTANDARIZADOS.
4.1 ANTECEDENTES Los microcontroladores se han desarrollado para cubrir las ms diversas aplicaciones. Se utilizan en la industria automotriz, en equipos de comunicaciones y de telefona, en instrumentos electrnicos, en equipos mdicos e industriales de todo tipo, en electrodomsticos y juguetes, entre muchas otras aplicaciones. En esencia se trata de microcomputadoras en un slo circuito integrado, con todas sus unidades funcionales, como: CPU, memoria RAM, memoria ROM, puertos de entrada-salida, y temporizadores; as como otras unidades especializadas, incluyendo contadores, convertidores Analgico-digital y moduladores por ancho de pulso, entre muchas otras. Estos dispositivos estn concebidos fundamentalmente para ser utilizados en aplicaciones puntuales, es decir, aplicaciones donde el microcontrolador debe realizar un pequeo nmero de tareas, al menor costo posible. En estas aplicaciones, el microcontrolador ejecuta un programa almacenado permanentemente en su memoria, el cual trabaja con algunos datos almacenados temporalmente e interacta con el exterior a travs de las lneas de entrada-salida de que dispone. De esta manera, el microcontrolador es parte de la aplicacin, por eso tambin se le denomina controlador incrustado o embebido en la aplicacin Algunas de las caractersticas deseables en un microcontrolador, son las siguientes: Recursos suficientes de entrada-salida, slo la capacidad de proceso necesaria, seguridad en el funcionamiento, bajo consumo de energa y proteccin contra lectura no autorizada de su programa, entre otras. Los microcontroladores PIC, con Arquitectura Harvard y tipo RISC, son fabricados y comercializados por la compaa Microchip, son dispositivos de bajo costo y sus caractersticas cubren prcticamente todas las necesidades, para cualquier tipo de aplicacin. Se dividen en tres grandes grupos, dependiendo de sus caractersticas: gama baja, gama media y gama alta. Entre todos, un dispositivo muy popular es el PIC16F84A.
Pgina | 38
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
Figura 4.1 Terminales del microcontrolador PIC16F84A
CARACTERSTICAS DEL MICROCONTROLADOR Conjunto de slo 35 instrucciones Las instrucciones se ejecutan en un ciclo de reloj, excepto las de saltos, que se ejecutan en dos ciclos de reloj. La velocidad de operacin est en funcin de la entrada de reloj, de hasta 20 MHz., para un ciclo de instruccin de 200 s. Cuenta con memoria de programa de 1024 palabras. Memoria RAM de datos de 68 bytes. Memoria EEPROM de datos de 64 bytes. Ancho de instrucciones de 14-bits 15 registros de hardware para funciones especiales Stack de hardware con 8-niveles de profundidad Modos de direccionamiento directo, indirecto y relativo Cuatro fuentes de interrupcin: Externa, a travs de la terminal RB0/INT Sobreflujo del temporizador TMR0 Deteccin de interrupcin en el Puerto B <7:4> Escritura de datos terminada en la EEPROM de datos
Pgina | 39
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
Figura 4.2 Diagrama a bloques del microcontrolador PIC16F84A
CARACTERSTICAS PARA MANEJO DE PERIFRICOS 13 Terminales de entrada/salida con control individual de direccin de datos. Capacidad de corriente para manejar directamente cargas de diodos emisores de luz. (LED). Temporizador/contador TMR0 de 8-bits, con pre-escalador programable de 8-bits.
Pgina | 40
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
Figura 4.3 Conjunto de instrucciones del microcontrolador PIC16F84A
EJEMPLOS DE PROGRAMAS UTILIZANDO EL LENGUAJE ENSAMBLADOR DEL MICROCONTROLADOR PIC16F84A ACTIVIDAD: Documentar los programas utilizando la columna de comentarios, explicando la accin de cada instruccin; elaborar el diagrama de flujo y probarlo utilizando el entorno de programacin MPLAB IDE (ver Gua de aprendizaje en el apndice). Este programa muestra el uso de los puertos A y B, as como el temporizador/contador TMR0. Pgina | 41
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
Programa que muestra el uso de los puertos A y B, as como el temporizador/contador TMR0.
OPCION TMR0 ESTADO PUERTOA PUERTOB CONTADOR Inicio equ equ equ equ equ equ org bsf movlw movwf movlw movwf movlw movwf bcf clrf 0x01 0x01 0x03 0x05 0x06 0x10 0 ESTADO,5 b'11010110' OPCION 0xff PUERTOA 0x00 PUERTOB ESTADO,5 PUERTOB
Lee
movf PUERTOA,0 movwf PUERTOB call Retardo call Retardo goto Lee movlw d'2' movwf CONTADOR clrf TMR0 btfss TMR0,0 goto Explora decfsz CONTADOR,1 goto Retardo1 return End
Retardo Retardo1 Explora
Pgina | 42
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
Programa que muestra el uso del microcontrolador PIC16F84A como conmutador, utilizando los puertos A y B, as como el temporizador/contador TMR0.
OPCION TMR0 ESTADO PUERTOB CONTADOR Inicio equ equ equ equ equ org bsf movlw movwf movlw movwf bcf clrf bsf bcf call bcf bsf call goto 0x01 0x01 0x03 0x06 0x10 0 ESTADO,5 b'11010110' OPCION 0x00 PUERTOB ESTADO,5 PUERTOB PUERTOB,3 PUERTOB,4 Retardo PUERTOB,3 PUERTOB,4 Retardo Conmuta
Conmuta
Retardo Retardo1 Explora
movlw d'2' movwf CONTADOR clrf TMR0 btfss TMR0,0 goto Explora decfsz CONTADOR,1 goto Retardo1 return End
Pgina | 43
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
4.2 PRCTICAS DE LABORATORIO MATERIA: INTERFACES CLAVE: SCF-0418 EQUIPO No. Fecha:
PROFESOR: Dr. Rolando Palacios Ortega
PRCTICA # 4.- Perifricos no estandarizados. OBJETIVO(S): Disear e implementar un sistema de seguridad utilizando un Microcontrolador, que eventualmente puede interconectarse a una computadora personal. Desarrollar software de supervisin y control utilizando programacin en Lenguaje Ensamblador. Aplicar Sensores y Actuadores en sistemas de supervisin y control. MATERIAL: Microcontrolador PIC16F84A, cristal de cuarzo 4 MHz., 2 Capacitores 22 pFd. Resistor 10 KOhm. Detector de paso, Detector de luz de da, interruptor de palanca, (2) Actuador con TRIAC, Actuador con Relevador, Foco, Zumbador, Motor. EQUIPO: Computadora personal con MPLAB 8.80 instalado. 1 Multmetro Digital. 1 Fuente de Alimentacin Regulada +5 VCD, + 12 VCD HERRAMIENTA: 1 Pinzas de punta para electrnica, 1 Pinzas de corte para electrnica. 1 Juego de caimanes. ACTIVIDADES: 1.- Disear la tabla de estados lgicos. 2.- Desarrollar el programa principal utilizando Lenguaje Ensamblador. 3.- Desarrollar rutinas de entrada y salida utilizando Lenguaje Ensamblador. 4.- Probar el sistema utilizando Sensores de entrada y Actuadores como salida.
DIAGRAMAS: CIRCUITO #1.- Durante el da, cuando se activa el detector de paso y la alarma est apagada, el sistema activa el motor para abrir la puerta y lo apaga despus de 10 segundos.. Durante el da, cuando se activa el detector de paso y la alarma est encendida, NO se activa el motor para abrir la puerta, se activa el zumbador y permanece activo hasta que se apaga la alarma. Durante la noche, cuando se activa el detector de paso y la alarma est apagada, el sistema activa el motor para abrir la puerta, enciende el foco y los apaga despus de 10 segundos. Pgina | 44
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO Durante la noche, cuando se activa el detector de paso y la alarma est encendida, NO se activa el motor para abrir la puerta, enciende el foco, activa el zumbador y los apaga hasta que se apaga la alarma.
Detector de paso Buffer no inversor
Motor Puertos A y B Microcontrolador PIC16F84A
Buffer no inversor
Detector de luz de da
Foco
Encendido Apagado de alarma
Zumbador
Figura 1.- Diagrama a bloques del sistema
NOTA: Recuerde que las entradas y salidas del microcontrolador manejan niveles TTL de +5VCD. Programa en Lenguaje Ensamblador
Estados
Entradas
Control
Salidas
Figura 2.- Diagrama a bloques del programa de supervisin y control Pgina | 45
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
Formato del Reporte:
1. Portada 2. ndice de Contenido 3. Resumen (media cuartilla) 4. Abstract (Resumen en Ingls) 5. Introduccin (5 a 10 cuartillas) 6. Desarrollo terico (10 a 15 cuartillas) 7. Desarrollo Prctico (10 a 15 cuartillas) 8. Conclusiones (3 cuartillas) 9. Bibliografa (5 a 10 libros o pginas) 10. Glosario (Definicin de los trminos utilizados) 11. Anexos (Hojas de datos de los dispositivos)
Bibliografa de la prctica:
1. Microchip (2001). PIC16F84A Datasheet. Microchip Technology Inc. USA. 2. Microchip (2009). MPLAB IDE Users Guide with MPLAB Editor and MPLAB SIM Simulator. Microchip Technology Inc. USA. 3. Palacios Enrique, Remiro Fernando, Lpez Lucas (2009). Microcontrolador PIC16F84. Desarrollo de Proyectos. Editorial Alfaomega-RaMa. Mxico. 4. Angulo Jos y Angulo Ignacio (2003). Microcontroladores PIC. Diseo prctico de aplicaciones. Primera Parte. Editorial McGraw-Hill. Espaa. 5. Valds Fernando, Palls Ramn (2007). Microcontroladores. Fundamentos y aplicaciones con PIC. Editorial Alfaomega-Marcombo. Mxico.
Pgina | 46
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
BIBLIOGRAFA
1. Abel P. (1996). Lenguaje Ensamblador y programacin para PC IBM y compatibles. Prentice-Hall. Mxico 2. Barry, B. Brey. (2006) Microprocesadores intel. Pearson 7 Edicin. 3. Bolton, William (2006). Mecatrnica. Ed. Alfaomega. Mxico. 4. Boylestad y Nashelsky (2003). Electrnica: Teora de Circuitos y Dispositivos Electrnicos. Ed. Prentice-Hall. Mxico. 5. Malvino, Albert Paul (2000). Principios de Electrnica. Ed. McGraw-Hill. Mxico. 6. Microchip (2001). PIC16F84A Datasheet. Microchip Technology Inc. USA 7. Microchip (2009). MPLAB IDE Users Guide with MPLAB Editor and MPLAB SIM Simulator. Microchip Technology Inc. USA. 8. Palacios Enrique, Remiro Fernando, Lpez Lucas (2009). Microcontrolador PIC16F84. Desarrollo de Proyectos. Editorial Alfaomega-RaMa. Mxico. 9. Sabri, Cetinkunt (2007). Mecatrnica. Ed. Patria. Mxico 10. Stallings, W. (2008). Organizacin y Arquitectura de Computadoras . 7 Edicin. Editorial Prentice Hall. Madrid, Espaa. 11. Tocci, Ronald (2003). Sistemas Digitales. Principios y Aplicaciones. Ed. Pearson. Mxico. 12. Usategui, Jos M. (1999). Microcontroladores PIC. Diseo prctico de aplicaciones. Editorial McGraw-Hill. Espaa. 13. Valds Fernando, Palls Ramn (2007). Microcontroladores. Fundamentos y aplicaciones con PIC. Editorial Alfaomega-Marcombo. Mxico.
ENLACES 1. 2. 3. 4. 5. 6. 7. http://perso.wanadoo.es/pictob/micropic16f84.htm http://www.aulafacil.com/Word/temario.htm http://www.eduteka.org/pdfdir/UNESCOEstandaresDocentes.pdf http://www.microchip.com/ http://www.pic16f84a.org/ http://www.pictronico.com/tienda/ http://www.scribd.com/doc/19417100/Manual-Pic16f84a
Pgina | 47
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
APNDICE
GUA DE APRENDIZAJE
PROGRAMACIN DE MICROCONTROLADORES PIC ENTORNO DE PROGRAMACIN MPLAB IDE
Pgina | 48
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
GUA DE APRENDIZAJE.
CURSO
PROGRAMACIN DE MICROCONTROLADORES PIC
TEMA 1.- Introduccin a los microcontroladores PIC de Microchip TEMA 2.- El entorno de programacin MPLAB IDE TEMA 3.- Seleccin del dispositivo TEMA 4.- Programa Fuente TEMA 5.- Seleccin del Ensamblador TEMA 6.- Seleccin del Simulador TEMA 7.- Bits de configuracin TEMA 8.- Ensamblar y Enlazar TEMA 9.- Simulacin del programa TEMA 10.- Exportar archivo Hexadecimal TEMA 11.- Programacin del dispositivo TEMA 12.- Prueba del circuito TEMA 13.- Autoevaluacin TEMA 14.- Conclusiones TEMA 15.- Bibliografa
Pgina | 49
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
TEMA 1 Introduccin a los microcontroladores PIC de Microchip Los microcontroladores se han desarrollado para cubrir las ms diversas aplicaciones. Se utilizan en la industria automotriz, en equipos de comunicaciones y de telefona, en instrumentos electrnicos, en equipos mdicos e industriales de todo tipo, en electrodomsticos y juguetes, entre muchas otras aplicaciones. En esencia se trata de microcomputadoras en un slo circuito integrado, con todas sus unidades funcionales, como: CPU, memoria RAM, memoria ROM, puertos de entrada-salida, y temporizadores; as como otras unidades especializadas, incluyendo contadores, convertidores Analgico-digital y moduladores por ancho de pulso, entre muchas otras. Estos dispositivos estn concebidos fundamentalmente para ser utilizados en aplicaciones puntuales, es decir, aplicaciones donde el microcontrolador debe realizar un pequeo nmero de tareas, al menor costo posible. En estas aplicaciones, el microcontrolador ejecuta un programa almacenado permanentemente en su memoria, el cual trabaja con algunos datos almacenados temporalmente e interacta con el exterior a travs de las lneas de entrada-salida de que dispone. De esta manera, el microcontrolador es parte de la aplicacin, por eso tambin se le denomina controlador incrustado o embebido en la aplicacin Algunas de las caractersticas deseables en un microcontrolador, son las siguientes: Recursos suficientes de entrada-salida, slo la capacidad de proceso necesaria, seguridad en el funcionamiento, bajo consumo de energa y proteccin contra lectura no autorizada de su programa, entre otras. Los microcontroladores PIC, con Arquitectura Harvard y tipo RISC, son fabricados y comercializados por la compaa Microchip, son dispositivos de bajo costo y sus caractersticas cubren prcticamente todas las necesidades, para cualquier tipo de aplicacin. Se dividen en tres grandes grupos, dependiendo de sus caractersticas: gama baja, gama media y gama alta. Entre todos, un dispositivo muy popular es el PIC16F84A.
Tema anterior
Inicio
Tema siguiente
Pgina | 50
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
TEMA 2 El entorno de programacin MPLAB IDE MPLAB IDE es un entorno integrado para el desarrollo de aplicaciones utilizando los microcontroladores PIC de la compaa Microchip. Puede descargar la ltima versin disponible desde el sitio Web de Microchip http://www.microchip.com/; en la pestaa Design accede a la pgina MPLAB IDE, en cuya parte inferior se encuentran todos los programas y manuales disponibles para descargar de manera gratuita. Una vez que se descarga el archivo se debe descomprimir, utilizando WinRar o WinZip, posteriormente se instala ejecutando la aplicacin Setup. Este entorno de programacin incluye un Editor para escribir el Programa Fuente; un Ensamblador para generar cdigo objeto; un Simulador que nos permite visualizar la ejecucin de las instrucciones, paso a paso y de manera continua; un Depurador para corregir los errores de manera dinmica; as como herramientas de desarrollo para definir los bits de configuracin del microcontrolador, entre otras cosas.
Tema anterior
Inicio
Tema siguiente
Pgina | 51
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
TEMA 3 Seleccin del dispositivo Para realizar esta accin debe acceder a la opcin Configure del men principal del MPLAB IDE, posteriormente seleccionar la opcin Select Device y finalmente buscar el nmero del microcontrolador que desee programar. Como ejemplo, se puede buscar y seleccionar el microcontrolador PIC16F84A. Al realizar esta accin se marcan en verde los recursos que soporta la versin actual del MPLAB IDE, como programadores, lenguajes, herramientas de diseo y depuradores. Mientras que aparecen en rojo, aquellos recursos que no estn soportados por la versin actual del entorno de desarrollo. Una vez que se selecciona el dispositivo, el entorno de programacin queda configurado para operar de acuerdo a las caractersticas del dispositivo elegido, lo que hace innecesario declararlo en el programa fuente, accin que tena que realizarse en las primeras versiones del lenguaje ensamblador.
Tema anterior
Inicio
Tema siguiente
Pgina | 52
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
TEMA 4 Programa Fuente El programa fuente se debe elaborar a partir de un Algoritmo y de un Diagrama de Flujo, de esta manera se garantiza la secuencia lgica y ordenada de instrucciones, adems de que se realiza un anlisis exhaustivo del problema a resolver. El programa fuente se puede elaborar utilizando un procesador de texto simple, como Wordpad, pero se debe Guardar de preferencia como archivo con formato MS-DOS, con extensin ASM, para evitar los caracteres de control, ocultos en procesadores de texto ms complejos, como Word, donde es importante la presentacin del texto. Tambin se puede escribir utilizando los recursos del MPLAB IDE, para ello basta con ingresar a la pestaa File, dentro del men principal y seleccionar la opcin New, o bien seleccionar el icono del documento en blanco o New File. De esa manera se abre una ventana para la captura del programa fuente. Se recomienda Guardar el archivo durante el proceso de captura, para evitar algn accidente, que pudiera provocar la prdida del programa capturado.
Tema anterior
Inicio
Tema siguiente
Pgina | 53
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
TEMA 5 Seleccin del Ensamblador Cuando est listo el programa fuente, es necesario elegir el programa Ensamblador, as como las Libreras relacionadas con el dispositivo seleccionado. Para ello se accede a la pestaa Project y se selecciona la opcin Project Wizard. Como primer paso se debe declarar el microcontrolador con el que se va a trabajar, de esta manera, queda definido el conjunto de instrucciones, as como las libreras necesarias para ensamblar el programa. Como segundo paso se selecciona el conjunto de herramientas ( Language toolsuite) que van a permitir ensamblar y enlazar el programa, incluyendo las Libreras del microcontrolador. En el tercer paso se crea el archivo del proyecto, que guarda los contenidos del entorno de programacin, su configuracin y los archivos relacionados. El cuarto paso consiste en seleccionar los archivos que van a estar involucrados en el proceso de ensamblado y enlace, para ello se seleccionan y se aaden (Add), o se eliminan, del conjunto de archivos del proyecto. En primer lugar se debe incluir el archivo de trabajo con extensin ASM y posteriormente aquellos archivos que estn relacionados con el proyecto.
Tema anterior
Inicio
Tema siguiente
Pgina | 54
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
TEMA 6 Seleccin del Simulador Una vez que se captur el programa fuente, se puede probar utilizando el simulador que est integrado al MPLAB IDE. Esto permite ejecutar el programa y visualizar su comportamiento dentro de un ambiente controlado. Como primer paso, se selecciona la pestaa Debugger del men principal, a continuacin se elige la opcin Select Tool, accin que despliega todas las posibles opciones disponibles para el microcontrolador que se estn utilizando, y que coinciden con aquellas mostradas durante el proceso de seleccin del dispositivo. Entre esas opciones se puede elegir MPLAB SIM, herramienta que da facilidades para la ejecucin del programa, paso a paso y en carrera libre; adems de que permite la visualizacin de los registros involucrados en el proceso, entre otras posibilidades.
Tema anterior
Inicio
Tema siguiente Pgina | 55
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
TEMA 7 Bits de configuracin Los microcontroladores PIC cuentan con un conjunto de Bits, cuya configuracin define el modo de operacin del dispositivo, lo que le da una gran versatilidad ya que el mismo circuito podr comportarse de manera diferente, dependiendo de los requerimientos de la aplicacin. Para definir el estado de estos Bits, se accede a la pestaa Configure del men principal, una vez dentro de ella se elige la opcin Configuration Bits, despus de eso en pantalla se presenta una ventana con cuatro filas, cinco columnas y un recuadro marcado arriba a la izquierda con la leyenda: Configuration Bits set in code, el cual se debe desmarcar para poder cambiar el valor de cada bit, accin que se realiza al seleccionar la columna Setting de cada uno de los campos que se desee modificar.
Tema anterior
Inicio
Tema siguiente
Pgina | 56
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
TEMA 8 Ensamblar y Enlazar Al llegar a esta etapa ya se debe tener un proyecto creado, ver TEMA 5, que contenga un programa fuente escrito en el Lenguaje Ensamblador del microcontrolador que se defini en la configuracin del dispositivo, ver TEMA 3, y tambin deben estar definidas las herramientas para ensamblar y enlazar. Una vez verificado lo anterior, se selecciona la pestaa Project en el men principal y se elige la opcin Build All, para realizar de una vez todo el proceso de ensamblado y enlace con las libreras disponibles, despus de lo anterior se abre una ventana que reporta el avance del proceso, hasta que finalmente, se reporta la terminacin exitosa con letras negras. En caso de que se encuentre algn error en el programa fuente, que podr ser de escritura o de sintaxis, no se concluye el proceso de ensamblado y se reporta el error con letras rojas. Como resultado del proceso anterior, se crean varios archivos, entre ellos *.LST, que contiene el listado general del programa ya ensamblado, *.ERR que contiene los errores encontrados, *.HEX conteniendo el cdigo objeto y *.MAP que contiene datos adicionales.
Tema anterior
Inicio
Tema siguiente
Pgina | 57
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
TEMA 9 Simulacin del programa La simulacin es una de las herramientas ms tiles y verstiles del MPLAB IDE, ya que permite la ejecucin del programa en carrera libre y paso a paso. Es posible introducir Breakpoints, lo que facilita el anlisis y la depuracin del programa, permitiendo la bsqueda y correccin de errores en muy poco tiempo. Adems, es posible observar el estado de los registros y puertos involucrados en la ejecucin del programa seleccionando la pestaa Project en el men principal, y posteriormente elegimos la opcin Watch, con la que se abre un men a travs del cual podemos seleccionar el registro, puerto o variable cuyo comportamiento estemos interesados en observar durante la ejecucin del programa.
Tema anterior
Inicio
Tema siguiente
Pgina | 58
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
TEMA 10 Exportar archivo Hexadecimal Despus de simular la ejecucin del programa, estamos listos para llevar el cdigo objeto al programador. Sin embargo, antes de hacerlo debemos recordar que es necesario incluir los bits de configuracin, como el tipo de reloj, si est habilitado o no el temporizador del perro guardin, el temporizador del encendido y la proteccin del cdigo de programa que se va a grabar en el microcontrolador. Accedemos a la opcin File del men principal y seleccionamos la opcin Export, de esa manera el nuevo archivo de cdigo objeto contiene los bits de configuracin y puede grabarse utilizando un programador de PIC.
Tema anterior
Inicio
Tema siguiente
Pgina | 59
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO TEMA 11 Programacin del dispositivo Para programar el microcontrolador, utilizamos el programador Master Z1 de la compaa Pictrnico (http://www.pictronico.com/tienda/). Este programador tiene la ventaja de que puede interconectarse a la computadora personal a travs de un puerto USB, permite la programacin en el propio circuito de aplicacin ( ICSP- In Circuit Serial Programming) y cuenta con una base tipo ZIF (Zero Insertion Force). Para utilizarlo, antes de conectar es necesario instalar el controlador, una vez realizada esa accin se puede conectar el programador, con el microcontrolador colocado correctamente en la base ZIF, a un puerto USB y se aprecia que se enciende el LED de encendido. A continuacin se ejecuta el acceso directo PicKit2 que est en el escritorio, como resultado de la instalacin del controlador. Como resultado de lo anterior, en la pantalla aparece una ventana con un mensaje notificando que ya reconoci al programador, por lo que se puede acceder a la opcin Device Family del men principal y elegir la opcin que corresponda al microcontrolador que se va a programar, si estamos utilizando el PIC16F84A, elegimos Midrange. Se carga el archivo hexadecimal con la opcin File Import Hex, se selecciona la opcin Write y finalmente se presenta un mensaje notificando que se realiz la accin. Si algo sale mal, los mansajes aparecen en color rojo y ser necesario repetir la operacin despus de revisar el procedimiento. Al concluir la programacin del microcontrolador, se puede extraer de la base ZIF e insertarlo en el circuito de la aplicacin para probarlo inmediatamente.
Tema anterior
Inicio
Tema siguiente
Pgina | 60
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
TEMA 12 Prueba del circuito Probar el circuito implica armarlo, utilizando un protoboard o una placa de circuito impreso. De esa manera se puede comprobar la operacin conjunta del programa que se est ejecutando en el interior de microcontrolador, con los circuitos electrnicos, bajo las condiciones reales de operacin de la aplicacin. El circuito de reloj debe coincidir con los Bits de configuracin, ver TEMA 7, seleccionados en el entorno del MPLAB IDE; en caso de que se haya seleccionado un cristal externo, el Bit correspondiente deber estar habilitado y el cristal deber operar a la frecuencia del microcontrolador.
Tema anterior
Inicio
Tema siguiente
Pgina | 61
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
TEMA 13 Autoevaluacin SELECCIONE LA RESPUESTA CORRECTA: 1.- Qu es un microcontrolador? a) Un CPU de propsito especfico. b) Una microcomputadora en un circuito integrado. c) Una microcomputadora sin CPU. 2.- Cules son los elementos principales de un microcontrolador? a) Fuente de alimentacin, CPU, reloj y memoria RAM. b) Convertidor A-D, Temporizadores y memoria RAM. c) CPU, memoria RAM, memoria ROM y puertos. 3.- Mencione tres aplicaciones donde se utilicen microcontroladores. a) Electrodomsticos, automviles, equipo mdico. b) Bebidas gaseosas, naves espaciales, electrodomsticos. c) Equipo mdico, naves espaciales, aceites para automvil. 4.- Qu acciones se pueden realizar en el entorno de desarrollo MPLAB IDE? a) Chatear, Ensamblar, Simular y Ligar. b) Ensamblar, Enlazar, Simular y Depurar. c) Editar, Compilar, Ensamblar y Jugar. 5.- Cules son las ventajas de utilizar el entorno de desarrollo MPLAB IDE? a) Es gratuito, lo actualizan constantemente, contiene todas las herramientas para desarrollar aplicaciones con microcontroladores PIC. b) Es gratuito, sirve para todos los microcontroladores sin importar la marca, es fcil de utilizar. c) Es muy rpido, es gratuito, sirve para todos los microcontroladores sin importar la marca. 6.- Cmo se genera el archivo hexadecimal que contiene los bits de configuracin? a) Es el resultado de Ensamblar utilizando la opcin Project Buid All. b) Es el resultado de Compilar utilizando la opcin Project Make. c) Es el resultado de Exportar utilizando la opcin File Export.
Tema anterior
Inicio
Tema siguiente Pgina | 62
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
Conclusiones
El uso de herramientas informticas para la creacin de competencias representa un recurso invaluable para la labor docente, ya que de esa manera es posible atraer la atencin del alumno y mantenerlo interesado en la formacin de los saberes: el Saber Conocer, Saber Hacer y Saber Ser. El trabajo desarrollado en esta Gua de Aprendizaje, forma parte de la materia Interfaces, incluida en el Plan de Estudios de la carrera de Ingeniera en Sistemas Computacionales. La competencia especfica a desarrollar, est relacionada con la programacin de microcontroladores PIC, de la compaa Microchip Technology Inc., dispositivos muy populares por su bajo costo, su arquitectura sencilla pero muy verstil, su conjunto reducido de instrucciones, las herramientas de desarrollo de aplicaciones, as como por la gran cantidad de documentacin disponible. En lo personal he observado que a los estudiantes les resulta difcil comprender los procesos que se realizan al interior de dispositivos que forman parte de la arquitectura de una computadora, como CPU, memoria o puertos. Porque se trata de procesos complejos, cuya explicacin requiere de elementos didcticos de apoyo. Con los microcontroladores el problema se incrementa, porque se trata de dispositivos que contienen una microcomputadora dentro de un slo circuito integrado, con un nmero limitado de terminales, por lo que su programacin puede confundir a los alumnos si no se cuenta con las herramientas adecuadas. Por lo anterior, me pareci adecuado dedicar este ejercicio a un tema, que me parece importante y que eventualmente puede impactar positivamente la enseanza del uso de los microcontroladores y su integracin al diseo de interfaces electrnicas, tanto analgicas como digitales. .
Tema anterior
Inicio
Tema siguiente
Pgina | 63
INSTITUTO TECNOLGICO DE ACAPULCO Departamento de Sistemas y Computacin PRCTICAS DE LABORATORIO
BIBLIOGRAFA
1. Microchip (2009). MPLAB IDE Users Guide with MPLAB Editor and MPLAB SIM Simulator. Microchip Technology Inc. USA. 2. Palacios Enrique, Remiro Fernando, Lpez Lucas (2009). Microcontrolador PIC16F84. Desarrollo de Proyectos. Editorial Alfaomega-RaMa. Mxico. 3. Usategui, Jos M. (1999). Microcontroladores PIC. Diseo prctico de aplicaciones. Editorial McGraw-Hill. Espaa. 4. Valds Fernando, Palls Ramn (2007). Microcontroladores. Fundamentos y aplicaciones con PIC. Editorial Alfaomega-Marcombo. Mxico.
ENLACES
1. 2. 3. 4. 5. 6. 7.
http://perso.wanadoo.es/pictob/micropic16f84.htm http://www.aulafacil.com/Word/temario.htm http://www.eduteka.org/pdfdir/UNESCOEstandaresDocentes.pdf http://www.microchip.com/ http://www.pic16f84a.org/ http://www.pictronico.com/tienda/ http://www.scribd.com/doc/19417100/Manual-Pic16f84a
Tema anterior
Inicio
Pgina | 64
Anda mungkin juga menyukai
- Guía Técnica para El Desarrollo de Competencias Sistemas ProgramablesDokumen66 halamanGuía Técnica para El Desarrollo de Competencias Sistemas ProgramablesAidee FierroBelum ada peringkat
- Guia Tecnica para El Desarrollo de Competencias Sistemas ProgramablesDokumen89 halamanGuia Tecnica para El Desarrollo de Competencias Sistemas ProgramablesGalen MarekBelum ada peringkat
- Informe ProyectoDokumen4 halamanInforme ProyectoHENRRY DANIEL APOLO ORTEGABelum ada peringkat
- Rreporte de Practica Instrumentación y ControlDokumen10 halamanRreporte de Practica Instrumentación y ControlFERNANDEZ MORALES EDSON YAHIRBelum ada peringkat
- Act1 T4 VictorMendez 2BDokumen21 halamanAct1 T4 VictorMendez 2BAlonso MendezBelum ada peringkat
- Guia de Practicas Taller II Abril 2016Dokumen82 halamanGuia de Practicas Taller II Abril 2016ABelum ada peringkat
- Preinforme 1Dokumen11 halamanPreinforme 1Juan Manuel LópezBelum ada peringkat
- REDES - InformeDokumen25 halamanREDES - InformeRenato Rios RomeroBelum ada peringkat
- Introducción al laboratorio de sensoresDokumen101 halamanIntroducción al laboratorio de sensoresOnassis Guzman GuzmanBelum ada peringkat
- Documentacion de Interfaces 1Dokumen74 halamanDocumentacion de Interfaces 1oscamenBelum ada peringkat
- Universidad Autónoma de Nuevo León: Facultad de Ingeniería Mecánica y EléctricaDokumen8 halamanUniversidad Autónoma de Nuevo León: Facultad de Ingeniería Mecánica y EléctricaEduardo Lopez TorresBelum ada peringkat
- Introduccion A La Electronica 201402 SillaboDokumen5 halamanIntroduccion A La Electronica 201402 SillabooscarhsBelum ada peringkat
- Portafolio de AutomatizaciónDokumen58 halamanPortafolio de AutomatizaciónYonathan Salazar FerrufinoBelum ada peringkat
- Informe Previo 1 - Circuitos Eléctricos IDokumen9 halamanInforme Previo 1 - Circuitos Eléctricos IR,Belum ada peringkat
- Manual de Prácticas de InstrumentaciónDokumen14 halamanManual de Prácticas de InstrumentaciónGabyBelum ada peringkat
- A161Z332 MicrocontroladoresDokumen7 halamanA161Z332 MicrocontroladoresFrancisco Gomez100% (1)
- Guías Laboratorio Sistemas Sistemas DiscretosDokumen19 halamanGuías Laboratorio Sistemas Sistemas Discretosdavidf34_Belum ada peringkat
- Laboratorios 1 Diseño Lógico DigitalDokumen12 halamanLaboratorios 1 Diseño Lógico DigitalErick M'pBelum ada peringkat
- Laboratorios 1 Diseño Lógico DigitalDokumen12 halamanLaboratorios 1 Diseño Lógico DigitalErick M'pBelum ada peringkat
- Logica Cableda y Programable 2020Dokumen23 halamanLogica Cableda y Programable 2020Alejandro ZavalaBelum ada peringkat
- Ape Micro Unidad 2Dokumen31 halamanApe Micro Unidad 2Alex steven Ricardo ricardoBelum ada peringkat
- Descripción de Los Equipos Del Laboratorio de Comunicaciones.Dokumen4 halamanDescripción de Los Equipos Del Laboratorio de Comunicaciones.Sebas Escobar100% (1)
- Amplificador diferencial con transistoresDokumen15 halamanAmplificador diferencial con transistoreswillyBelum ada peringkat
- Practica 1Dokumen13 halamanPractica 1RiacardoyaelBelum ada peringkat
- Contador Óptico Reporte Proyecto Final PDFDokumen9 halamanContador Óptico Reporte Proyecto Final PDFjohnlovecraftBelum ada peringkat
- UniversidadDokumen3 halamanUniversidadROYER CRISTOFER OCON TTITOBelum ada peringkat
- Manual de pracSenEInstrumF (Autoguardado)Dokumen19 halamanManual de pracSenEInstrumF (Autoguardado)supervicdom25Belum ada peringkat
- 4.3 Funcionamiento y Caracteristicas Principales Del PLCDokumen5 halaman4.3 Funcionamiento y Caracteristicas Principales Del PLCAlfredo MartinezBelum ada peringkat
- Sistema de Adquision de Datos Arduino+MatlabDokumen16 halamanSistema de Adquision de Datos Arduino+MatlabJose Luis Colmenares100% (1)
- Laboratorio 16 - Entradas y Salidas en ArduinoDokumen9 halamanLaboratorio 16 - Entradas y Salidas en ArduinoPacayBelum ada peringkat
- Controladores Logicos ProgramablesDokumen6 halamanControladores Logicos ProgramablesZaguinho AlbesBelum ada peringkat
- Guia Lab Ii 2019 CeDokumen16 halamanGuia Lab Ii 2019 CeWild-r MJBelum ada peringkat
- INFORME GENERAL Del CircuitoDokumen8 halamanINFORME GENERAL Del CircuitoROMINA AUXILIADORA VARGAS GARCIABelum ada peringkat
- Tarea InstrumDokumen10 halamanTarea InstrumleidyBelum ada peringkat
- Control PidtemperaturaDokumen13 halamanControl PidtemperaturaFannyBelum ada peringkat
- ANÁLISIS DE PARÁMETROS ELÉCTRICOS MEDIANTE UN ANALIZADOR DE REDESDokumen18 halamanANÁLISIS DE PARÁMETROS ELÉCTRICOS MEDIANTE UN ANALIZADOR DE REDESedithBelum ada peringkat
- Monografia de Moc TerminadoDokumen13 halamanMonografia de Moc TerminadoHugo Robert EspinozaBelum ada peringkat
- Trabajo-De-Laboratorio-De-Dispo 4Dokumen13 halamanTrabajo-De-Laboratorio-De-Dispo 4Giancarlo Nuñez CarbajalBelum ada peringkat
- DETECCIÓN DE COLOR Y CONTADORDokumen18 halamanDETECCIÓN DE COLOR Y CONTADORVictorMendozaBelum ada peringkat
- Glab-S07-Cmendiola-2023-1 (Bendezu Perez)Dokumen13 halamanGlab-S07-Cmendiola-2023-1 (Bendezu Perez)Rosa Angely PerezBelum ada peringkat
- MicrocontroladoresDokumen7 halamanMicrocontroladoresxxxxxBelum ada peringkat
- Práctica de Laboratorio No 6++Dokumen3 halamanPráctica de Laboratorio No 6++Javier Flores CespedesBelum ada peringkat
- Practica 5 Fotoresistencias LDR PDFDokumen2 halamanPractica 5 Fotoresistencias LDR PDFLucero Alexandra Valeriano CcacyaBelum ada peringkat
- Silabo Electronica IndustrialDokumen10 halamanSilabo Electronica IndustrialFrancisco Javier ReyesBelum ada peringkat
- Modulo 1 - Universal Trainer. Electronica AnalógicaDokumen115 halamanModulo 1 - Universal Trainer. Electronica Analógicaxendika50% (4)
- Etapa 3 - Harver RamirezDokumen11 halamanEtapa 3 - Harver RamirezLeidy Johana Fontecha GalindoBelum ada peringkat
- Guia Practica2labmicro 2018Dokumen26 halamanGuia Practica2labmicro 2018AleXander DiiazBelum ada peringkat
- Proyecto Final Tercer ParcialDokumen21 halamanProyecto Final Tercer ParcialRosario Martinez torresBelum ada peringkat
- Cicloconvertidores y optoacopladoresDokumen11 halamanCicloconvertidores y optoacopladoresLuis ToledoBelum ada peringkat
- Relevador ProgamableDokumen15 halamanRelevador ProgamableJose Enrique Perez EspinozaBelum ada peringkat
- Contador infrarrojo de 7 segmentosDokumen6 halamanContador infrarrojo de 7 segmentosAguilar Alvarez Fabian EduardoBelum ada peringkat
- Silabo Ee635 2020 1Dokumen4 halamanSilabo Ee635 2020 1leoBelum ada peringkat
- Etapa - 3 - Anguie - GarcésDokumen12 halamanEtapa - 3 - Anguie - GarcésJuanito JujujuBelum ada peringkat
- Trabajo Unidad 4Dokumen14 halamanTrabajo Unidad 4rogelio arceBelum ada peringkat
- Automatizacion y PLCDokumen5 halamanAutomatizacion y PLCHector VallejosBelum ada peringkat
- Proyecto Electronico IdatDokumen114 halamanProyecto Electronico IdatEmerson Vargas100% (1)
- Metodología básica de instrumentación industrial y electrónicaDari EverandMetodología básica de instrumentación industrial y electrónicaPenilaian: 4 dari 5 bintang4/5 (12)
- UF0863 - Reparación y ampliación de equipos y componentes hardware microinformáticosDari EverandUF0863 - Reparación y ampliación de equipos y componentes hardware microinformáticosBelum ada peringkat
- 100 circuitos de shields para arduino (español)Dari Everand100 circuitos de shields para arduino (español)Penilaian: 3.5 dari 5 bintang3.5/5 (3)
- Sensores electroquímicos: Teoría y aplicacionesDari EverandSensores electroquímicos: Teoría y aplicacionesBelum ada peringkat
- Alarma en El Automovil+Como FuncionaDokumen9 halamanAlarma en El Automovil+Como FuncionajuliocesarmotaBelum ada peringkat
- Guía SubredDokumen5 halamanGuía Subredpiriwenho100% (2)
- Sensores Artificiais e HumanosDokumen7 halamanSensores Artificiais e HumanosRenato IzidoroBelum ada peringkat
- Em8-Planificacion y Modelado PDFDokumen8 halamanEm8-Planificacion y Modelado PDFErick ParedesBelum ada peringkat
- Em8-Planificacion y Modelado PDFDokumen8 halamanEm8-Planificacion y Modelado PDFErick ParedesBelum ada peringkat
- ProgramacionWeb ISCDokumen11 halamanProgramacionWeb ISCManuel ATBelum ada peringkat
- Restauracion de Una BaseDokumen4 halamanRestauracion de Una BaseManuel ATBelum ada peringkat
- Creacion de Vistas en SQL Server 2008Dokumen5 halamanCreacion de Vistas en SQL Server 2008Migue ÁngelBelum ada peringkat
- 2x U4Dokumen30 halaman2x U4Manuel ATBelum ada peringkat
- Eucaris - TSCP 800 PDFDokumen23 halamanEucaris - TSCP 800 PDFpirihuey1234Belum ada peringkat
- Fibra OpticaDokumen34 halamanFibra OpticaJose Alfredo Mendoza RodriguezBelum ada peringkat
- Enrique Metinides, La Habitación SecretaDokumen9 halamanEnrique Metinides, La Habitación SecretaManolo MuñozBelum ada peringkat
- Tópicos Cavas Cuartos 2018Dokumen26 halamanTópicos Cavas Cuartos 2018Jesus BolivarBelum ada peringkat
- De Que Hablamos Cuando Hablamos de CompetitividadDokumen25 halamanDe Que Hablamos Cuando Hablamos de Competitividadjuanito_77Belum ada peringkat
- PracticaDokumen10 halamanPracticaJonathan CamarilloBelum ada peringkat
- Válvula de CamisaDokumen2 halamanVálvula de CamisaIsidro Castillo HernandezBelum ada peringkat
- Anexo Técnico de Factura Electrónica de Venta Validación PreviaV1.8Dokumen538 halamanAnexo Técnico de Factura Electrónica de Venta Validación PreviaV1.8William Hernan Gomez MendezBelum ada peringkat
- Teoría Clásica, Eficientista o CientíficaDokumen1 halamanTeoría Clásica, Eficientista o CientíficaDeus Ex Araneus100% (2)
- 6 - Material de Trabajo - GTH PDFDokumen43 halaman6 - Material de Trabajo - GTH PDFLiana SalasBelum ada peringkat
- Actividad Entregable 2Dokumen12 halamanActividad Entregable 2Jenny Ramirez0% (1)
- Apuntes Capacitacion GpsDokumen43 halamanApuntes Capacitacion GpsJuan Prinson Guzman CamperoBelum ada peringkat
- Introducción Economía de La SaludDokumen45 halamanIntroducción Economía de La SaludSarah HartBelum ada peringkat
- Proyecto SocialDokumen23 halamanProyecto SocialWilson Andres VARGAS DIAZBelum ada peringkat
- Pintura Ignifuga Retardadora Al FuegoDokumen2 halamanPintura Ignifuga Retardadora Al Fuegoalessandra100% (1)
- CV de QuimicoDokumen7 halamanCV de QuimicoRaul GutierrezBelum ada peringkat
- Vacantes Sep 17Dokumen30 halamanVacantes Sep 17Hector Eduardo Gutierrez CureñoBelum ada peringkat
- Procedimiento Izaje y Grua para La Instalación de PortonDokumen13 halamanProcedimiento Izaje y Grua para La Instalación de Portondario andradeBelum ada peringkat
- Manejo Estacion TotalDokumen3 halamanManejo Estacion Totalbrayan stiven sanchez moraBelum ada peringkat
- Tipos de DestilaciónDokumen11 halamanTipos de Destilaciónjlgpsimpson100% (1)
- g32 Ppto TotalDokumen1 halamang32 Ppto TotalGabriel IgnacioBelum ada peringkat
- Aire Acondicionado y Averías PDFDokumen76 halamanAire Acondicionado y Averías PDFCarlos Rodriguez EscobarBelum ada peringkat
- PDF 201229085211Dokumen1 halamanPDF 201229085211Stella CortesBelum ada peringkat
- Servicio de comedor y cafetería BTVDokumen62 halamanServicio de comedor y cafetería BTVAxel Chachaqui MamaniBelum ada peringkat
- Exposicion de La Norma E050Dokumen72 halamanExposicion de La Norma E050Martha Isabel Lizano Chumacero100% (4)
- Aceptar servicio SAPDokumen13 halamanAceptar servicio SAPjorge villamizarBelum ada peringkat
- Caso 4 Bayfield Mud CompanyDokumen2 halamanCaso 4 Bayfield Mud CompanyAngel Chilo PaccaraBelum ada peringkat
- Celosías acústicas CAC-300 para control de ruidoDokumen1 halamanCelosías acústicas CAC-300 para control de ruidoRoberto BeltránBelum ada peringkat
- IPN Práctica Estabilidad Flotabilidad Barcaza 40cmDokumen7 halamanIPN Práctica Estabilidad Flotabilidad Barcaza 40cmCarlos RoblesBelum ada peringkat
- Costos Unidad 7Dokumen5 halamanCostos Unidad 7Yeison SandovalBelum ada peringkat