Anda mungkin juga menyukai
- MANUAL+ALINEACION+ESPECTRUM DesbloqueadoDokumen110 halamanMANUAL+ALINEACION+ESPECTRUM Desbloqueadochiky100% (1)
- Radial AxialDokumen34 halamanRadial Axialluisja051100% (1)
- Manual Del Participante Bombas Centrifugas PDFDokumen82 halamanManual Del Participante Bombas Centrifugas PDFJorge PerezBelum ada peringkat
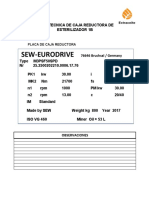
- Ficha Tecnica de Caja Reductora de Esterilizador 1BDokumen3 halamanFicha Tecnica de Caja Reductora de Esterilizador 1BLeonel VillaltaBelum ada peringkat
- Clase 04 - NSR-10 Capitulos B1-B5Dokumen48 halamanClase 04 - NSR-10 Capitulos B1-B5sebastiantobon85100% (1)
- Capacitacion - Alineacion (Modo de Compatibilidad)Dokumen24 halamanCapacitacion - Alineacion (Modo de Compatibilidad)Elkin Contreras RBelum ada peringkat
- General Catalogue 2010Dokumen258 halamanGeneral Catalogue 2010marlowe17Belum ada peringkat
- Correas - Características y EspecificacionesDokumen32 halamanCorreas - Características y EspecificacionesRodrigo MamaniBelum ada peringkat
- 06 Pre AlineaciónDokumen7 halaman06 Pre AlineaciónMauro CruzBelum ada peringkat
- Clase 2 LogaritmoDokumen15 halamanClase 2 LogaritmoRaul Alfredo Supo OrihuelaBelum ada peringkat
- Flexion Del CigueñalDokumen14 halamanFlexion Del Cigueñalhttp://elmaquinista.foroargentina.net/forum100% (11)
- Easy Laser Cap ADokumen54 halamanEasy Laser Cap AcajascBelum ada peringkat
- Procedimento Montaje y Nivelacion de BombasDokumen9 halamanProcedimento Montaje y Nivelacion de BombasMantenimiento La PuntaBelum ada peringkat
- MuestreoDokumen43 halamanMuestreoMarco Mendoza Sánchez100% (1)
- SKF Mapro 2015 ESDokumen188 halamanSKF Mapro 2015 ESHector MaldonadoBelum ada peringkat
- Equilibrado y Alineamiento de Rotores PDFDokumen56 halamanEquilibrado y Alineamiento de Rotores PDFJorge RodriguezBelum ada peringkat
- Método de Alineamiento Ejes RotativosDokumen23 halamanMétodo de Alineamiento Ejes RotativosManuel CarreñoBelum ada peringkat
- 05 Tolerancias y AjustesDokumen31 halaman05 Tolerancias y AjustesChristian UribeBelum ada peringkat
- Alineacion Capitulo 1 Terminos y Definiciones BimanDokumen30 halamanAlineacion Capitulo 1 Terminos y Definiciones Bimanleonel100% (1)
- Alineamienro de Ejes Verticales y HorizontalesDokumen9 halamanAlineamienro de Ejes Verticales y Horizontalesconfi petrolBelum ada peringkat
- ALINEACIONDokumen21 halamanALINEACIONBlakysha GonzalezBelum ada peringkat
- Alineacion Capitulo 2 Causas y Efectos BimanDokumen41 halamanAlineacion Capitulo 2 Causas y Efectos Bimanleonel100% (1)
- Qué Es La AlineaciónDokumen19 halamanQué Es La AlineaciónTurkechyBelum ada peringkat
- Instrucciones de Uso - Aplicación Alineación de Ejes VerticalesDokumen16 halamanInstrucciones de Uso - Aplicación Alineación de Ejes VerticalesAVBelum ada peringkat
- Filosofía y Ciencia en La Etapa Ontológica de Xavier ZubiriDokumen51 halamanFilosofía y Ciencia en La Etapa Ontológica de Xavier ZubiriChuckyChuck LscBelum ada peringkat
- SolidCast FlowcastDokumen39 halamanSolidCast FlowcastJosue Garcia YarangaBelum ada peringkat
- Argumentacion JuridicaDokumen16 halamanArgumentacion JuridicaJorge Raez BarjaBelum ada peringkat
- Halberg HegaDokumen20 halamanHalberg HegaJOSE INESBelum ada peringkat
- Alineacion en Reverso Kelvin QuinteroDokumen9 halamanAlineacion en Reverso Kelvin QuinteroJader David Rocha MoralesBelum ada peringkat
- Refinación Del Petroleo I - 2017Dokumen53 halamanRefinación Del Petroleo I - 2017phier leonBelum ada peringkat
- Alineacion de AcoplesDokumen6 halamanAlineacion de AcoplesLuis Fernando Gonzalez ReyesBelum ada peringkat
- Alineacion Cara-Lomo (Con Grafico)Dokumen6 halamanAlineacion Cara-Lomo (Con Grafico)walkerfromhellBelum ada peringkat
- Lab N°4. Mtto PredictivoDokumen21 halamanLab N°4. Mtto PredictivoFrank Cesar Tello CastilloBelum ada peringkat
- Omega 150-460 ADokumen8 halamanOmega 150-460 AFernando Orbea GuerreroBelum ada peringkat
- FTensado Medición 5453 BrowningDokumen2 halamanFTensado Medición 5453 BrowningSupervisor100% (1)
- ALINEACIONDokumen8 halamanALINEACIONjuan david lucumiBelum ada peringkat
- CHUMACERADokumen14 halamanCHUMACERAPatrikGustavoBustosPortilloBelum ada peringkat
- AlineacionDokumen13 halamanAlineacionrodolfosti100% (1)
- Selección de Acoplamiento VulkanDokumen1 halamanSelección de Acoplamiento VulkanAlex Xavier Malasquez LeónBelum ada peringkat
- Alineamiento Cara PerfierieDokumen8 halamanAlineamiento Cara PerfierieIng Ovidio Valdez100% (2)
- Tolerancia TotalDokumen217 halamanTolerancia TotalsergioBelum ada peringkat
- AMEF TVDokumen16 halamanAMEF TVMai LineroBelum ada peringkat
- Alineacion y Nivelacion de EquiposDokumen15 halamanAlineacion y Nivelacion de EquiposJose Antonio Aguilar Ibarra100% (1)
- Calculo de La Frecuencia de Inspección de MantenimientopredictivoDokumen6 halamanCalculo de La Frecuencia de Inspección de MantenimientopredictivoJavier GuerreroBelum ada peringkat
- Alineamiento en ReversoDokumen5 halamanAlineamiento en ReversowalkerfromhellBelum ada peringkat
- Conceptos Basicos Alineación de EjesDokumen25 halamanConceptos Basicos Alineación de EjesErick Posso JiménezBelum ada peringkat
- Balance oDokumen7 halamanBalance oana100% (1)
- Alineación de EjesDokumen5 halamanAlineación de EjesJamen Luis Quinonez BellidoBelum ada peringkat
- 3 Selección de RodamientosDokumen7 halaman3 Selección de Rodamientosrubio1967Belum ada peringkat
- Alineacion y RectitudDokumen34 halamanAlineacion y RectitudFran RanieriBelum ada peringkat
- Conceptos Básicos Sobre Alineación de Ejes de Máquinas Rotativas IndustrialesDokumen18 halamanConceptos Básicos Sobre Alineación de Ejes de Máquinas Rotativas Industrialesleobayona5Belum ada peringkat
- Alineamiento de EjesDokumen4 halamanAlineamiento de EjesJesus CortesBelum ada peringkat
- Equilibrado o BalanceoDokumen85 halamanEquilibrado o BalanceoJeancarlos MendezBelum ada peringkat
- Taller 3 AlineamientoDokumen9 halamanTaller 3 AlineamientoJose Leonardo Aldaird Uscca GiraldoBelum ada peringkat
- Balanceo Dinamico SKFDokumen39 halamanBalanceo Dinamico SKFMARS BELL DANCEBelum ada peringkat
- 03 Disposición de RodamientosDokumen51 halaman03 Disposición de RodamientosDanielContrerasContrerasBelum ada peringkat
- CATALOGO HSM Instalacion y Mantenimiento PDFDokumen12 halamanCATALOGO HSM Instalacion y Mantenimiento PDFFernando NanezBelum ada peringkat
- Anexo 7 Especificaciones Técnicas V2Dokumen57 halamanAnexo 7 Especificaciones Técnicas V2Luisa Fernanda Hortua ReyBelum ada peringkat
- Informe KpisDokumen35 halamanInforme KpisIsaac Aquino CutiBelum ada peringkat
- Sistema de Lubricacion Del Torno ColchesterDokumen4 halamanSistema de Lubricacion Del Torno ColchesterDiego AlfonzoBelum ada peringkat
- Informe BoquillaDokumen19 halamanInforme BoquillaFederico Celis SánchezBelum ada peringkat
- Lab 7 Mecanica Del Solido Deformable ElasticidadDokumen15 halamanLab 7 Mecanica Del Solido Deformable ElasticidadCHURA GUTIERREZ SAUL ALEJANDROBelum ada peringkat
- Reporte 2 Ing Control 1609A Cabrera Acevedo Erick AbrahamDokumen7 halamanReporte 2 Ing Control 1609A Cabrera Acevedo Erick Abrahamuriel99imcBelum ada peringkat
- Mecanismo ManivelaDokumen4 halamanMecanismo ManivelaasdfgBelum ada peringkat
- Problema p3 CarreterasDokumen5 halamanProblema p3 CarreterasOrlando JavierBelum ada peringkat
- Presentación 25Dokumen14 halamanPresentación 25Jose Luis RattiaBelum ada peringkat
- Camaras de CombustionDokumen20 halamanCamaras de CombustionSantiago LeonBelum ada peringkat
- Ar MonicasDokumen8 halamanAr MonicasjhonsrBelum ada peringkat
- Guia GramaticalDokumen19 halamanGuia GramaticalJose Luis RattiaBelum ada peringkat
- Cómo Subir Las PlaquetasDokumen2 halamanCómo Subir Las PlaquetasJose Luis RattiaBelum ada peringkat
- Limites de Vibraciones en Compresores ArielDokumen1 halamanLimites de Vibraciones en Compresores ArielJose Luis RattiaBelum ada peringkat
- Tabla de Frecuencias Vip-C 900 - 1200 CPMDokumen35 halamanTabla de Frecuencias Vip-C 900 - 1200 CPMJose Luis RattiaBelum ada peringkat
- Alcance de Actividades en Mantenimiento Predictivo Cat.Dokumen3 halamanAlcance de Actividades en Mantenimiento Predictivo Cat.Jose Luis RattiaBelum ada peringkat
- Tabla Rosca NPTDokumen1 halamanTabla Rosca NPTJose Luis RattiaBelum ada peringkat
- Tensiones y Deformaciones (Planos Principales)Dokumen7 halamanTensiones y Deformaciones (Planos Principales)Adrián Puelles RodríguezBelum ada peringkat
- MA420 Plantilla - Desarrollo RC - EU3 2023BDokumen4 halamanMA420 Plantilla - Desarrollo RC - EU3 2023BHeidy CarhuanchoBelum ada peringkat
- Hidrologia Parte 6Dokumen7 halamanHidrologia Parte 6Yohan HerreraBelum ada peringkat
- Curvas Características de Una BombajjjjjDokumen25 halamanCurvas Características de Una BombajjjjjJovani MartinezBelum ada peringkat
- Modulo 7Dokumen20 halamanModulo 7Sarai PadillaBelum ada peringkat
- Ley de FourierDokumen4 halamanLey de FourierMaria Fernanda Albarran OrtizBelum ada peringkat
- Calculo Diferencial Cap10Dokumen2 halamanCalculo Diferencial Cap10royer999100% (2)
- Esfuerzo Axial y de FlexiónDokumen4 halamanEsfuerzo Axial y de FlexiónSeaGaboBelum ada peringkat
- Practica 8 ProbabilidadDokumen1 halamanPractica 8 ProbabilidadDiego MuñozBelum ada peringkat
- Math SpeechDokumen2 halamanMath SpeechQuike YeTeBelum ada peringkat
- Taller 1 - Recortado1 PDFDokumen5 halamanTaller 1 - Recortado1 PDFJlamLeandro AlbaBelum ada peringkat
- Unidad 2 Protocolo IndividualDokumen6 halamanUnidad 2 Protocolo IndividualTati RamirezBelum ada peringkat
- Teoria de ErroresDokumen21 halamanTeoria de ErroresVladimir XD Neyra Santa cruzBelum ada peringkat
- Simce Fracciones y DecimalesDokumen7 halamanSimce Fracciones y DecimalesKarina AlejandraBelum ada peringkat
- Guía 1 Suma FraccionesDokumen4 halamanGuía 1 Suma FraccionesGalvlov OjnajBelum ada peringkat
- Plan de Clase MatemáticasDokumen7 halamanPlan de Clase MatemáticasBelkys DavilaBelum ada peringkat
- Constant - El Principio de La DesorientacionDokumen1 halamanConstant - El Principio de La DesorientacionpatodptBelum ada peringkat
- La Gerencia EstratégicaDokumen5 halamanLa Gerencia EstratégicajersonjordanBelum ada peringkat
- Notacion CientificaDokumen39 halamanNotacion CientificaAnonymous 0hhYkhn0Belum ada peringkat
- Guia Fisica 8 Periodo IIIDokumen9 halamanGuia Fisica 8 Periodo IIIAndrea GutierrezBelum ada peringkat
- Razón (Matemáticas) - Wikipedia, La Enciclopedia LibreDokumen5 halamanRazón (Matemáticas) - Wikipedia, La Enciclopedia Libretimhan gracia y verdad100% (1)
- MRUVDokumen16 halamanMRUVFettuccini EstropajoBelum ada peringkat
- Examen Básico de FísicaDokumen2 halamanExamen Básico de FísicaandersonBelum ada peringkat