Anda mungkin juga menyukai
- Lab REPORTTTDokumen9 halamanLab REPORTTTepiXtremeBelum ada peringkat
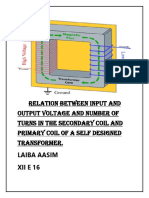
- Relation Between Input and Output Voltage and Number of Turns in The Secondary Coil and Primary Coil of A Self Designed TransformerDokumen22 halamanRelation Between Input and Output Voltage and Number of Turns in The Secondary Coil and Primary Coil of A Self Designed TransformerBharati patil67% (18)
- شرح مخطط كارنوفDokumen65 halamanشرح مخطط كارنوفzoherofBelum ada peringkat
- GCSE C2 Revision + Exam Questions (1) - Chemi-BondingDokumen35 halamanGCSE C2 Revision + Exam Questions (1) - Chemi-BondingPrincess KimBelum ada peringkat
- Modeling and Analysis of 6 Phase Synchronous MotorDokumen14 halamanModeling and Analysis of 6 Phase Synchronous MotorArif IqbalBelum ada peringkat
- E.T.E. 3 Phase Transformer InfoDokumen9 halamanE.T.E. 3 Phase Transformer InfoSanjay VermaBelum ada peringkat
- Problem Set 1Dokumen9 halamanProblem Set 1jerry tranBelum ada peringkat
- E1 - Controlled Rectifiers PDFDokumen92 halamanE1 - Controlled Rectifiers PDFmitulBelum ada peringkat
- EE 010 402 DC Machines and TransformersDokumen2 halamanEE 010 402 DC Machines and TransformersResmara ShajahanBelum ada peringkat
- DC Motor Speed ControllerDokumen22 halamanDC Motor Speed ControllerShafqt MbrkBelum ada peringkat
- Induction Motors Unit 3Dokumen26 halamanInduction Motors Unit 3babu KaroliBelum ada peringkat
- Reference BooksDokumen3 halamanReference BooksAmitabhaBelum ada peringkat
- UNIT 5 - Special MachinesDokumen33 halamanUNIT 5 - Special MachinesKapilachander ThangavelBelum ada peringkat
- EMEDDokumen128 halamanEMEDAYŞEGÜLBelum ada peringkat
- Induction Motor: Navigation SearchDokumen8 halamanInduction Motor: Navigation SearchSoni Mishra TiwariBelum ada peringkat
- Dcmotors and Their RepresentationDokumen61 halamanDcmotors and Their RepresentationSoeprapto AtmariBelum ada peringkat
- AC Machine Lecture No6Dokumen43 halamanAC Machine Lecture No6Mohammed Dyhia AliBelum ada peringkat
- Solid State Drives Short BookDokumen48 halamanSolid State Drives Short BookGomathi Raja MBelum ada peringkat
- DC MachinesDokumen52 halamanDC MachinesArun Kumar100% (1)
- Wound-Field Synchronous Machine DrivesDokumen62 halamanWound-Field Synchronous Machine DrivesKorlpate BhaskarBelum ada peringkat
- Industrial DrivesDokumen1 halamanIndustrial DrivesSatish NurukurthiBelum ada peringkat
- Hysteresis MotorDokumen27 halamanHysteresis MotorSubham GhoshBelum ada peringkat
- Repulsion MotorDokumen10 halamanRepulsion MotorAhmed Abd El MoatiBelum ada peringkat
- Injection of EMF in Rotor Circuit PDFDokumen5 halamanInjection of EMF in Rotor Circuit PDFkhidirtay50% (2)
- EE333 Electrical Machines Lab IIDokumen2 halamanEE333 Electrical Machines Lab IIvpzfarisBelum ada peringkat
- EE2403 Special Electrical MachinesDokumen19 halamanEE2403 Special Electrical MachinesvasanthavananBelum ada peringkat
- The Basics of Stepping MotorsDokumen6 halamanThe Basics of Stepping MotorsSherif EltoukhiBelum ada peringkat
- 3phase Induction Motor (Sukhpreet)Dokumen17 halaman3phase Induction Motor (Sukhpreet)Ankesh KunwarBelum ada peringkat
- Module 3Dokumen19 halamanModule 3Pragati ShindeBelum ada peringkat
- Simulation Study of Conventional Control Versus MTPA-Based For PMSM ControlDokumen4 halamanSimulation Study of Conventional Control Versus MTPA-Based For PMSM Controlpersian67Belum ada peringkat
- 25510-A New Calculation For Designing Multilayer Planar Spiral Inductors PDF PDFDokumen4 halaman25510-A New Calculation For Designing Multilayer Planar Spiral Inductors PDF PDFAnonymous Kti5jq5EJIBelum ada peringkat
- Transfer Function of A PMDC MotorDokumen6 halamanTransfer Function of A PMDC MotorKenneth TanBelum ada peringkat
- DC MachinesDokumen49 halamanDC MachinesAshfaq AbibBelum ada peringkat
- Typical Rod Gap ArresterDokumen11 halamanTypical Rod Gap ArresterMuhammad Asif Iqbal100% (1)
- Novel Dual-Excitation Permanent Magnet Vernier Machine: Akio Toba Thomas A. LipoDokumen6 halamanNovel Dual-Excitation Permanent Magnet Vernier Machine: Akio Toba Thomas A. LipoNenad Kostadinovic50% (2)
- Electromagnetic Induction: Sardar Patel Institute of Technology 1Dokumen22 halamanElectromagnetic Induction: Sardar Patel Institute of Technology 1krushiBelum ada peringkat
- L10 - Series Magnetic CircuitsDokumen8 halamanL10 - Series Magnetic CircuitsdhruvBelum ada peringkat
- Damper Winding Influence On UMPDokumen8 halamanDamper Winding Influence On UMPSrinivas KamarsuBelum ada peringkat
- 4 - Rotating - Machines - Intro PDFDokumen107 halaman4 - Rotating - Machines - Intro PDFSantiago Sanchez SotoBelum ada peringkat
- Construction of Three Phase Induction MotorDokumen18 halamanConstruction of Three Phase Induction MotorRajeev ValunjkarBelum ada peringkat
- Chapter 5 DC MachinesDokumen49 halamanChapter 5 DC Machinesquocdung NguyenBelum ada peringkat
- Three Phase TransformersDokumen11 halamanThree Phase TransformersNosta SilvaBelum ada peringkat
- Axial Flux Motors Radial Flux MotorsDokumen5 halamanAxial Flux Motors Radial Flux Motors123456Belum ada peringkat
- (Single+Three) Phase Induction Motors Interview Questions SetDokumen18 halaman(Single+Three) Phase Induction Motors Interview Questions SetrajshahieeeBelum ada peringkat
- Parameter Identification of Induction Motor PDFDokumen65 halamanParameter Identification of Induction Motor PDFsalah eddineBelum ada peringkat
- Brushless D.C. Motors: Prepared By: Manuj Garg (2k13/EE/070) Mohit Goswami (2k13/EE/073)Dokumen17 halamanBrushless D.C. Motors: Prepared By: Manuj Garg (2k13/EE/070) Mohit Goswami (2k13/EE/073)Manuj GargBelum ada peringkat
- Technical Background On Linear Induction Motors in Transportation Jun 1970Dokumen99 halamanTechnical Background On Linear Induction Motors in Transportation Jun 1970Shantanu GaikwadBelum ada peringkat
- Analysis of Electrical MachineryDokumen66 halamanAnalysis of Electrical Machineryzabig100% (1)
- Week 71Dokumen25 halamanWeek 71Raphael SebucBelum ada peringkat
- Special - Electrical - Machines QBDokumen25 halamanSpecial - Electrical - Machines QBVel MuruganBelum ada peringkat
- Applied Directly To The Stator WindingsDokumen62 halamanApplied Directly To The Stator WindingsZekarias tenawBelum ada peringkat
- Special-Purpose Electric Machines (BLDC & PMS Motors) : by Animesh Mukherjee M.Tech. (CMC&PEA, 18M256)Dokumen26 halamanSpecial-Purpose Electric Machines (BLDC & PMS Motors) : by Animesh Mukherjee M.Tech. (CMC&PEA, 18M256)Animesh MukherjeeBelum ada peringkat
- Frog Leg WindingDokumen9 halamanFrog Leg WindingAbhijeet RedekarBelum ada peringkat
- Benn Machine Lab ManualDokumen14 halamanBenn Machine Lab ManualRahatullah Khan100% (1)
- Chapter3 InductionmachineDokumen25 halamanChapter3 InductionmachineAbhijitBelum ada peringkat
- Mathematical Modeling of Dynamic Induction Motor With Bearing FaultDokumen5 halamanMathematical Modeling of Dynamic Induction Motor With Bearing FaultTawhid Bin TarekBelum ada peringkat
- Mathematical Modelling of Dynamic Induction Motor and Performance Analysis With Bearing FaultDokumen5 halamanMathematical Modelling of Dynamic Induction Motor and Performance Analysis With Bearing Faulttoufik1986Belum ada peringkat
- Comparative Study of Five Level and SeveDokumen12 halamanComparative Study of Five Level and Sevemahmoud yarahmadiBelum ada peringkat
- Last Topics 1Dokumen11 halamanLast Topics 1Yasser DahabBelum ada peringkat
- CHAPTER4 - Current Source InverterDokumen46 halamanCHAPTER4 - Current Source InverterJandfor Tansfg Errott100% (1)
- A New Approach Based On Sinusoidal PWM Inverter With PI Controller For Vector Control of Induction MotorDokumen7 halamanA New Approach Based On Sinusoidal PWM Inverter With PI Controller For Vector Control of Induction MotortheijesBelum ada peringkat
- 12 Chapter6 PDFDokumen27 halaman12 Chapter6 PDFakun gamingjBelum ada peringkat
- Ee6801 PDFDokumen53 halamanEe6801 PDFHarini KarthikeyanBelum ada peringkat
- CMT Capitolul 4 - Transmisii Curele DintateDokumen19 halamanCMT Capitolul 4 - Transmisii Curele DintateANABelum ada peringkat
- Magnetic Particle Testing Procedure Song Ngu PDFDokumen24 halamanMagnetic Particle Testing Procedure Song Ngu PDFTrung Tinh Ho100% (1)
- Quiz EDC UNIT 1Dokumen4 halamanQuiz EDC UNIT 1kalpanadevi0% (1)
- GPAT Physical Pharmacy SyllabusDokumen2 halamanGPAT Physical Pharmacy Syllabuskumar Harsh100% (1)
- DD 41 Manhole Flotation AnalysisDokumen4 halamanDD 41 Manhole Flotation AnalysishutuguoBelum ada peringkat
- Pages From Leak Test Level 2Dokumen63 halamanPages From Leak Test Level 2ManivannanMudhaliarBelum ada peringkat
- BK 4 (CC 51400)Dokumen9 halamanBK 4 (CC 51400)hasan arifBelum ada peringkat
- PRINTED ChemT4HLQDokumen18 halamanPRINTED ChemT4HLQtaengooBelum ada peringkat
- 7.stellar AstrophysicsDokumen23 halaman7.stellar AstrophysicsYousra MashkoorBelum ada peringkat
- Simplified Method of Heat Calculations of Oil-Air Heat ExchangersDokumen9 halamanSimplified Method of Heat Calculations of Oil-Air Heat ExchangersAsad KhanBelum ada peringkat
- Realization of The Contextuality-Nonlocality Tradeoff With A Qutrit - Qubit Photon PairDokumen33 halamanRealization of The Contextuality-Nonlocality Tradeoff With A Qutrit - Qubit Photon PairGurvir SinghBelum ada peringkat
- (Springer Series in Synergetics 60) Yu. A. Kravtsov (Auth.), Professor Dr. Yurii A. Kravtsov (Eds.) - Limits of Predictability-Springer-Verlag Berlin Heidelberg (1993)Dokumen260 halaman(Springer Series in Synergetics 60) Yu. A. Kravtsov (Auth.), Professor Dr. Yurii A. Kravtsov (Eds.) - Limits of Predictability-Springer-Verlag Berlin Heidelberg (1993)Ashiq Elahi Design & Application EngineerBelum ada peringkat
- 6.7 (D. Bernardi)Dokumen19 halaman6.7 (D. Bernardi)hardik2309Belum ada peringkat
- MAT2322 Notes - by Eric HuaDokumen63 halamanMAT2322 Notes - by Eric HuaSahilGargBelum ada peringkat
- Viva Bee LabDokumen2 halamanViva Bee Labhari mBelum ada peringkat
- Moving Iron Type InstrumentsDokumen6 halamanMoving Iron Type InstrumentsAbhishek KatreBelum ada peringkat
- I. Engage: "Phet John Travoltage" Into Your BrowserDokumen4 halamanI. Engage: "Phet John Travoltage" Into Your BrowserEdgarAnwarGonzalezCafuentes0% (1)
- DDE Seminar Tutorial IIIDokumen19 halamanDDE Seminar Tutorial IIISandeep Ravikumar MurthyBelum ada peringkat
- Helicopter Flight DynamicsDokumen9 halamanHelicopter Flight DynamicsAlexandreSidantBelum ada peringkat
- XR Calculation LearnersDokumen4 halamanXR Calculation LearnersDaniel ThomasBelum ada peringkat
- MCQ For Module6Dokumen3 halamanMCQ For Module6Ijaz TalibBelum ada peringkat
- Nyquist Plot PDFDokumen24 halamanNyquist Plot PDFvidyagbargeBelum ada peringkat
- Design of Millimeter-Wave Microstrip Comb-Line Antenna ArrayDokumen4 halamanDesign of Millimeter-Wave Microstrip Comb-Line Antenna ArrayKrishnkant NainwalBelum ada peringkat
- Midterms q3 q4Dokumen22 halamanMidterms q3 q4JohnBelum ada peringkat
- Physics Lab Viva Part 2Dokumen3 halamanPhysics Lab Viva Part 2pikyBelum ada peringkat
- Casing Design Sept 15 (Ok)Dokumen5 halamanCasing Design Sept 15 (Ok)Mahmoud Ahmed Ali AbdelrazikBelum ada peringkat