Anda mungkin juga menyukai
- SOFIM Engine Repair Manual PDFDokumen126 halamanSOFIM Engine Repair Manual PDFkeiner cassiani100% (1)
- Rack and Pinion CalculationDokumen8 halamanRack and Pinion CalculationhendrobamaBelum ada peringkat
- Gear Box Design Assignment S2 2012Dokumen10 halamanGear Box Design Assignment S2 2012Nang TruongBelum ada peringkat
- KHK - Gear Technical RefDokumen176 halamanKHK - Gear Technical RefEZ100% (1)
- 77-1 Spur GearDokumen12 halaman77-1 Spur Gearrip11117675% (4)
- LSWTDokumen23 halamanLSWTprashasscribdBelum ada peringkat
- Design and Analysis of Worm GearDokumen26 halamanDesign and Analysis of Worm Gearshahzadali0786100% (2)
- Worm Gear DesignDokumen15 halamanWorm Gear Designsohamkoli100% (2)
- SAE Gear Design Course - C0223 - th003Dokumen194 halamanSAE Gear Design Course - C0223 - th003mirekjanda100% (5)
- Semi-Topping Shaper CuttersDokumen4 halamanSemi-Topping Shaper CuttersalemarlonstosBelum ada peringkat
- Gear Pump DesignDokumen5 halamanGear Pump DesignYashrajBelum ada peringkat
- Design of Bevel GearDokumen23 halamanDesign of Bevel Gearshahzadali078650% (2)
- Design Calculations of PistonDokumen6 halamanDesign Calculations of PistonRajashekar Reddy Kandala75% (8)
- Bevel Gear Design Project MainDokumen66 halamanBevel Gear Design Project MainJACKPOT LY100% (2)
- Hydraulic Diagram For Liebherr 544Dokumen12 halamanHydraulic Diagram For Liebherr 544Liebherr100% (1)
- Worm Gear PDFDokumen15 halamanWorm Gear PDFcemoksz100% (6)
- Gears Design MD2Dokumen52 halamanGears Design MD2Faizan MohyuddinBelum ada peringkat
- Design calculations for worm gearDokumen3 halamanDesign calculations for worm gearVenkateswaran venkateswaranBelum ada peringkat
- Design of Worm GearDokumen8 halamanDesign of Worm GearMarkHualdaBelum ada peringkat
- Gear DesignDokumen53 halamanGear Designtheleovn100% (3)
- Spline Design Using KISSSoftDokumen8 halamanSpline Design Using KISSSoftAllan John Sala Limson0% (1)
- Gear Generating Profile Shift CalculationsDokumen2 halamanGear Generating Profile Shift CalculationsSanjay Shelar0% (1)
- Worm Gear Formula-MasterDokumen30 halamanWorm Gear Formula-Masterer_winwibowoBelum ada peringkat
- Design Procedure For Spur and Helical Gear PDFDokumen15 halamanDesign Procedure For Spur and Helical Gear PDFBinoy K B100% (2)
- Gear Box DesignDokumen24 halamanGear Box DesignBada KimBelum ada peringkat
- Gear Adendum Modification CoefficientDokumen8 halamanGear Adendum Modification CoefficientRobert StuartBelum ada peringkat
- Important Hint: at Least One Warning Has Occurred During The CalculationDokumen8 halamanImportant Hint: at Least One Warning Has Occurred During The CalculationDemir HamzicBelum ada peringkat
- Tooth ThicknessDokumen9 halamanTooth ThicknessPraveen VundrajavarapuBelum ada peringkat
- Unit-4 Bevel GearsDokumen27 halamanUnit-4 Bevel GearsMarthande0% (1)
- Gear CalculationDokumen58 halamanGear CalculationSachin KubasadBelum ada peringkat
- Gear Hobbing Shaping and Shaving A Guide To Cycle Time Estimating and Process Planning PDFDokumen183 halamanGear Hobbing Shaping and Shaving A Guide To Cycle Time Estimating and Process Planning PDFvenkat100% (1)
- Module IV: Gears and Gear TrainsDokumen38 halamanModule IV: Gears and Gear TrainsSuraj VinayBelum ada peringkat
- Example 1 For Gearbox SelectionDokumen11 halamanExample 1 For Gearbox SelectionNakkolop100% (1)
- Calculations According To ISO 21771Dokumen6 halamanCalculations According To ISO 21771mail_krk0% (1)
- Spur GearDokumen98 halamanSpur Geargautham_93Belum ada peringkat
- 9.8 Calculation For Gleason System Spiral Bevel Gear: Z Z M B M - 'H M - HDokumen2 halaman9.8 Calculation For Gleason System Spiral Bevel Gear: Z Z M B M - 'H M - HRZW R100% (2)
- Gear Box Calculations and Working Drawing (Project)Dokumen24 halamanGear Box Calculations and Working Drawing (Project)Mahmoud Kassab50% (2)
- Euler Equation For Pump & TurbinesDokumen4 halamanEuler Equation For Pump & Turbineschakravarthime100% (2)
- Gears and Gear TrainsDokumen127 halamanGears and Gear TrainsVikki KotaBelum ada peringkat
- Design of Bevel GearDokumen4 halamanDesign of Bevel Gearenggsantu50% (2)
- Gear CorrectionDokumen17 halamanGear CorrectionMurugesanBelum ada peringkat
- Design of a 2-Stage Helical-Bevel GearboxDokumen33 halamanDesign of a 2-Stage Helical-Bevel GearboxNikhil SatbhaiBelum ada peringkat
- Spur Gear DesignDokumen51 halamanSpur Gear Designmshebbal2212100% (1)
- Gear TechnologyDokumen31 halamanGear TechnologyRishabh GawriBelum ada peringkat
- True Involute Diameter TIF SAP GearsolutionsDokumen9 halamanTrue Involute Diameter TIF SAP GearsolutionsSantiagoBelum ada peringkat
- Technical Data GearsDokumen171 halamanTechnical Data GearsdesetekBelum ada peringkat
- Planetary Gear CalculatorDokumen19 halamanPlanetary Gear CalculatorDaris M Al-MubarokBelum ada peringkat
- KissoftDokumen1.121 halamanKissoftordenador90Belum ada peringkat
- Formulas For Gear Calculation - External GearsDokumen10 halamanFormulas For Gear Calculation - External GearsJag WaramBelum ada peringkat
- 0614 GearSolutionsDokumen60 halaman0614 GearSolutionsMarco Vinicius100% (1)
- Design of Machine Elements ParDokumen197 halamanDesign of Machine Elements Parboyo999100% (7)
- Bevel GearDokumen17 halamanBevel Gearparesh09Belum ada peringkat
- Module 2 - GEARSDokumen17 halamanModule 2 - GEARSCollin FarBelum ada peringkat
- Lecture 16 - Worm Gears Worked Out ProblemsDokumen19 halamanLecture 16 - Worm Gears Worked Out ProblemsApurba haldar50% (2)
- Problems s2Dokumen6 halamanProblems s2zangue billy jamesBelum ada peringkat
- S7 Previous Year QPDokumen31 halamanS7 Previous Year QPbjt2k1Belum ada peringkat
- Spur Gear PDFDokumen11 halamanSpur Gear PDFegsamitBelum ada peringkat
- Spur GearDokumen11 halamanSpur GearvenkatkavinBelum ada peringkat
- Me8593 Design of Machine Elements: M.A.M. College of Engineering and TechnologyDokumen25 halamanMe8593 Design of Machine Elements: M.A.M. College of Engineering and TechnologymanikandanBelum ada peringkat
- Bevel GearDokumen28 halamanBevel Gearmahesh kitturBelum ada peringkat
- Gearbox Design IitDokumen25 halamanGearbox Design IitSrini VasanBelum ada peringkat
- University of Utah admissions dataDokumen1 halamanUniversity of Utah admissions dataprashasscribdBelum ada peringkat
- Cinema TicsDokumen40 halamanCinema TicsAlexandru Precup0% (1)
- Purdue University CalumetDokumen1 halamanPurdue University CalumetprashasscribdBelum ada peringkat
- Georgia Institute of TechnologyDokumen1 halamanGeorgia Institute of TechnologyprashasscribdBelum ada peringkat
- Determination of Turbulence in The UC Davis Aeronautical Wind TunnelDokumen7 halamanDetermination of Turbulence in The UC Davis Aeronautical Wind TunnelprashasscribdBelum ada peringkat
- Modular Fixture Design For BIW Lines Using Process Simulate: ArticleDokumen57 halamanModular Fixture Design For BIW Lines Using Process Simulate: ArticleprashasscribdBelum ada peringkat
- Auburn UniversityDokumen1 halamanAuburn UniversityprashasscribdBelum ada peringkat
- Carnegie Mellon UniversityDokumen1 halamanCarnegie Mellon UniversityprashasscribdBelum ada peringkat
- Arizona State UniversityDokumen2 halamanArizona State UniversityprashasscribdBelum ada peringkat
- .:: Astrill Error ::. &NBSP Socket Error # 10053 Software Caused Connection Abort. What Can You Do To Solve The Error: Try To Switch To Another Server If The Error Persists.Dokumen36 halaman.:: Astrill Error ::. &NBSP Socket Error # 10053 Software Caused Connection Abort. What Can You Do To Solve The Error: Try To Switch To Another Server If The Error Persists.franz_passariniBelum ada peringkat
- Design of The AirplaneDokumen674 halamanDesign of The Airplaneprashasscribd100% (2)
- Design of Various Components of An Open Circuit Blower Tunnel Without Exit DiffuserDokumen6 halamanDesign of Various Components of An Open Circuit Blower Tunnel Without Exit DiffuserprashasscribdBelum ada peringkat
- Basics of Turbulent FlowDokumen10 halamanBasics of Turbulent FlowlebrixBelum ada peringkat
- The Importance of Turbulence in The Wind Tunnel Flow AssesmentDokumen19 halamanThe Importance of Turbulence in The Wind Tunnel Flow AssesmentprashasscribdBelum ada peringkat
- Measurement of Free Stream Turbulence in Low Speed TunnelDokumen24 halamanMeasurement of Free Stream Turbulence in Low Speed TunnelprashasscribdBelum ada peringkat
- Measurement of Turbulence in The Liverpool UniversityDokumen31 halamanMeasurement of Turbulence in The Liverpool UniversityprashasscribdBelum ada peringkat
- RK-4 Im MatlabDokumen3 halamanRK-4 Im MatlabprashasscribdBelum ada peringkat
- Demonstration of The Effectiveness and Limitations of Thin Airfoil Theory in The Aerodynamic Study of Airfoil CharacteristicsDokumen12 halamanDemonstration of The Effectiveness and Limitations of Thin Airfoil Theory in The Aerodynamic Study of Airfoil CharacteristicsprashasscribdBelum ada peringkat
- Trasco Couplings: DescriptionDokumen19 halamanTrasco Couplings: DescriptionEdinson DextreBelum ada peringkat
- Robot Drivetrain Design PrinciplesDokumen22 halamanRobot Drivetrain Design PrinciplesTaufik RhomeBelum ada peringkat
- ME3491 Course PlanDokumen9 halamanME3491 Course Planmanoj1316kumar_63152Belum ada peringkat
- TCS Performance Products Catalog 2015Dokumen36 halamanTCS Performance Products Catalog 2015scribdfourmeBelum ada peringkat
- Design of Machine Elements II PDFDokumen6 halamanDesign of Machine Elements II PDFRavi RanjanBelum ada peringkat
- Service Bulletin: Issued by Canon Europa N.VDokumen3 halamanService Bulletin: Issued by Canon Europa N.VWillian S.Belum ada peringkat
- Caterpillar Cat 336 Excavator (Prefix SP9) Service Repair Manual (SP900001 and Up)Dokumen27 halamanCaterpillar Cat 336 Excavator (Prefix SP9) Service Repair Manual (SP900001 and Up)kfsmmeBelum ada peringkat
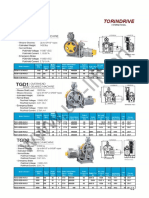
- Torin Drive ManualDokumen9 halamanTorin Drive ManualRebecca DangBelum ada peringkat
- WC357 Gear Deburring Brochure - RGB - 2-16Dokumen6 halamanWC357 Gear Deburring Brochure - RGB - 2-16novkovic1984Belum ada peringkat
- Design, Analysis and Fabrication of Shaft Driven MotorcycleDokumen10 halamanDesign, Analysis and Fabrication of Shaft Driven MotorcycleIJRASETPublicationsBelum ada peringkat
- Engineering Mechanics: 3D EquilibriumDokumen37 halamanEngineering Mechanics: 3D EquilibriumSrinivas ShareBelum ada peringkat
- Gear Dimension Calculation Tips DP CP ModDokumen3 halamanGear Dimension Calculation Tips DP CP ModGilbertoUGOBelum ada peringkat
- DIFFERENTIALDokumen42 halamanDIFFERENTIALThanh CongBelum ada peringkat
- Dokumen - Tips - Sugar Cane Juice Extractor ReportDokumen28 halamanDokumen - Tips - Sugar Cane Juice Extractor ReportRahul RathodBelum ada peringkat
- Amarillo Gear Repair ManualDokumen32 halamanAmarillo Gear Repair Manualfazzlie100% (1)
- AEN Micro ProjectDokumen11 halamanAEN Micro Projectvedantbakal043Belum ada peringkat
- Metal Cutter BornfaceDokumen41 halamanMetal Cutter BornfaceBukein KennBelum ada peringkat
- ST-125™ Control System For Stanadyne DB-4 Series Pumps: Product Manual 04169 (Revision D)Dokumen24 halamanST-125™ Control System For Stanadyne DB-4 Series Pumps: Product Manual 04169 (Revision D)Arc HieBelum ada peringkat
- Gear Changing Techniques For 18 SpeedDokumen12 halamanGear Changing Techniques For 18 SpeedU0U0IBelum ada peringkat
- Cosmet Presentation2Dokumen62 halamanCosmet Presentation2taghdirimBelum ada peringkat
- RTU-Syllabus of (VI Sem.)Dokumen7 halamanRTU-Syllabus of (VI Sem.)mamta1008835366Belum ada peringkat
- I Mold Product Overview Servomold Ver1.0 enDokumen8 halamanI Mold Product Overview Servomold Ver1.0 enInderjeet SinghBelum ada peringkat
- Suez University Faculty of Petroleum &mining Engineering Mechanical Design Sheet # 2Dokumen6 halamanSuez University Faculty of Petroleum &mining Engineering Mechanical Design Sheet # 2Zamalek ShikaBelum ada peringkat
- Steering GearDokumen34 halamanSteering GearBenedictus Kenny100% (2)
- Steyr S-Matic CVT: Automated and Efficient Drive SystemDokumen6 halamanSteyr S-Matic CVT: Automated and Efficient Drive Systemclcasal0% (1)
- Parts y Guia Mantenimiento Torres BACDokumen56 halamanParts y Guia Mantenimiento Torres BACcris yanezBelum ada peringkat
- Tool & Cutter GrinderDokumen64 halamanTool & Cutter GrinderAFIFAHZABIDI ZABIDIBelum ada peringkat
- 4560 E 2 TCM 12-73081 PDFDokumen78 halaman4560 E 2 TCM 12-73081 PDFVanessa Pajares LanciatoBelum ada peringkat