8051 Programs With Opcode
Diunggah oleh
Maddy TrichyDeskripsi Asli:
Hak Cipta
Format Tersedia
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
Format Tersedia
8051 Programs With Opcode
Diunggah oleh
Maddy TrichyHak Cipta:
Format Tersedia
SRINIVASAN ENGINEERING COLLEGE
DEPT OF ELECTRONICS AND COMMUNICATION ENGINEERING
ANNA UNIVERSITY CHENNAI
REGULATION 2008
III YEAR/ V SEMESTER
EC 2308 MICROPROCESSOR AND MICROCONTROLLER
LABORATORY
LAB MANUAL
ISSUE: 01 REVISION:00
APPROVED BY
PREPARED BY
Prof. B. REVATHI
K.VIJAYA KANTH, Assistant Professor.
HOD/ECE
R.SIVAGAMY, Assistant Professor.
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
Preface
This laboratory manual is prepared by the Department of Electronics and communication
engineering for microprocessor and microcontroller lab (EC 2308). This lab manual can be used as
instructional book for students, staff and instructors to assist in performing and understanding the
experiments. This manual will be available in electronic form from Colleges official website, for
the betterment of students.
Acknowledgement
We would like to express our profound gratitude and deep regards to the support offered
by the Chairman Shri. A.Srinivasan. We also take this opportunity to express a deep sense of
gratitude to our Principal Dr.B.Karthikeyan,M.E, Ph.D, for his valuable information and
guidance, which helped us in completing this task through various stages. We extend our hearty
thanks to our head of the department Prof.B.Revathi M.E, (Ph.D), for her constant
encouragement and constructive comments.
Finally the valuable comments from fellow faculty and assistance provided by the
department are highly acknowledged.
ISSUE: 01 REVISION: 00
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
INDEX
S.No
1
2
3
TOPIC
PAGE
NO
Syllabus
Lab Course Handout
Experiments
5
6
1. Programs for addition and subtraction of two numbers using 8086
2. Programs for multiplication and division of two numbers using 8086
13
3. Programs to sort the numbers in ascending and descending order using 8086 17
4. Programs to find largest and smallest numbers using 8086
21
5. Programs to copy the string form source to destination
7. Programs for interfacing analog to digital converter
25
28
31
8. Programs for interfacing digital to analog converter
34
9. Programs to interface the stepper motor
14. Program for 8 bit addition of two numbers using 8051
40
43
47
51
55
59
15. Program for 8 bit subtraction of two numbers using 8051
62
16. Program for 8 bit multiplication of two numbers using 8051
64
17. Program for 8 bit division of two numbers using 8051
66
18. Programs for bit manipulation using 8051
68
19. Programs for digital clock and stop watch (using 8086)
70
20. Programs to verify timer, interrupts & uart operations in 8031
72
6. Programs to find and replace the string in memory
10. Program to interface the programmable keyboard and display controller
11. Program for interfacing programmable timer
12. Program for interfacing USART
13. Program for interfacing PPI
ISSUE: 01 REVISION: 00
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
microcontroller
21. Communication between 8051 microcontroller
75
Kit & pc
ISSUE: 01 REVISION: 00
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
SYLLABUS
EC2308
MICROPROCESSOR AND MICROCONTROLLER LAB
1.
2.
3.
4.
5.
6.
Programs for 16 bit Arithmetic operations (Using 8086).
Programs for Sorting and Searching (Using 8086).
Programs for String manipulation operations (Using 8086).
Programs for Digital clock and Stop watch (Using 8086).
Interfacing ADC and DAC.
Parallel Communication between two MP Kits using Mode 1 and Mode 2 of
8255.
7. Interfacing and Programming 8279, 8259, and 8253.
8. Serial Communication between two MP Kits using 8251.
9. Interfacing and Programming of Stepper Motor and DC Motor Speed
control.
10.Programming using Arithmetic, Logical and Bit Manipulation instructions of
8051 microcontroller.
11.Programming and verifying Timer, Interrupts and UART operations in 8051
microcontroller.
12.Communication between 8051 Microcontroller kit and P C.
LIST OF EQUIPMENTS
(For a batch of 30 students)
Sl. No.
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
Description of Equipments
8086 Trainer
8051 Trainer
8255 Interfacing Card
8279 Interfacing Card
8259 Interfacing card
8251 Interfacing Card
ADC Interfacing card
DAC Interfacing Card
Stepper motor Interfacing card
DC motor Interfacing card
ISSUE: 01 REVISION: 00
Quantity
15
15
3
3
3
3
3
3
3
3
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
LAB COURSE HANDOUT
Subject code
: EC 2308
Subject Title
: Microprocessor and Microcontroller lab
Staff name
: K.Vijaya kanth & R.Sivagamy
Scope and Objective of the Subject:
To write the program in microprocessor and in microcontroller for various operations like
arithmetic and interfacing.
Course Plan / Schedule:
S.No
Topics to be covered
Learning objectives
Page
No*
No. of
hours
Programs for 16 bit Arithmetic operations
using 8086
To write the assembly language
program for addition, subtraction ,
multiplication and division using
8086
3 hrs
Programs for Sorting and Searching Using
8086
To write the assembly language
program to arrange the numbers in
ascending or in descending order
17
3hrs
Programs for String manipulation operations
To write the assembly language
program to copy a string
25
3hrs
Interfacing ADC and DAC
To write the assembly language
program to convert the analog value
into digital and vice versa
31
3hrs
Interfacing and Programming of Stepper
Motor and DC Motor Speed control
To write the interface program for
controlling the stepper motor
40
3hrs
Interfacing and Programming 8279, 8259, and
8253
To write the interface program for
keyboard interface, display
controller
43
3hrs
Serial Communication between two MP Kits
using 8251
To write the interface program for
serial communication between two
microprocessor
51
3hrs
ISSUE: 01 REVISION: 00
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
8
III YEAR
Parallel Communication between two MP
Kits using Mode 1 and Mode 2 of 8255
To write the interfacing program for
the parallel communication between
two microprocessor
51
3hrs
Programming using Arithmetic, Logical and
Bit Manipulation instructions of 8051
microcontroller
To write the program for addition,
subtraction , multiplication and
division using 8051 microcontroller
66
3hrs
10
Programming and verifying Timer, Interrupts
and UART operations in 8051 microcontroller
To write the program for interrupts,
timer using 8051
68
3hrs
11
Programs for Digital clock and Stop watch
To write the assembly language
program for displaying the timer
70
3hrs
12
Communication between 8051
Microcontroller kit and P C
To write the program for
communication between
microcontroller and computer
75
3hrs
*-As in Lab Manual
Evaluation scheme Internal Assessment
EC
No.
Evaluation
Components
Duration
Weightage
Observation
Continuous
20%
Record
Continuous
30%
Attendance
Continuous
30%
Model lab
3hr
20%
Timings for chamber consultation: Students should contact the Course Instructor in her/his
chamber during lunch break.
ISSUE: 01 REVISION: 00
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
STUDENTS GUIDELINES
There are 3 hours allocated to a laboratory session in Microprocessor and microcontroller lab.
It is a necessary part of the course at which attendance is compulsory.
Here are some guidelines to help you perform the Programs and to submit the reports:
1.
2.
3.
4.
5.
6.
Read all instructions carefully and proceed according to that.
Ask the faculty if you are unsure of any concept.
Write the program, and give connections.
Get the output from the kit.
Write up full and suitable conclusions for each experiment.
After completing the experiment complete the observation and get signature from the
staff.
7. Before coming to next lab make sure that you complete the record and get sign from the
faculty.
STAFF SIGNATURE
ISSUE: 01 REVISION: 00
HOD
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
8086 PROGRAMMING
ADDITION & SUBTRACTION
AIM:
To write an Assembly Language Program (ALP) for performing the addition and subtraction
operation of two byte numbers.
APPARATUS REQUIRED:
8086 trainer kit
ALGORITHM:
(i) 16-bit addition
Initialize the MSBs of sum to 0
Get the first number.
Add the second number to the first number.
If there is any carry, increment MSBs of sum by 1.
Store LSBs of sum.
Store MSBs of sum.
(ii) 16-bit subtraction
Initialize the MSBs of difference to 0
Get the first number
Subtract the second number from the first number.
If there is any borrow, increment MSBs of difference by 1.
Store LSBs of difference
Store MSBs of difference.
ISSUE: 01 REVISION: 00
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
FLOW CHART
ADDITION
SUBTRACTION
START
START
SET UP COUNTER (CY)
SET UP COUNTER (CARRY)
GET FIRST OPERAND
GET FIRST OPERAND
TO A
GET SECOND OPERAND TO A
SUBTRACT
SECOND OPERAND
FROM MEMORY
A=A+B
YES
IS THERE ANY
CY
IS THERE ANY
CARRY
YES
NO
COUNTER =
COUNTER + 1
COUNTER =
COUNTER + 1
STORE THE
DIFFERENCE
NO
STORE THE SUM
STORE THE CARRY
STORE THE CARRY
STOP
STOP
ISSUE: 01 REVISION: 00
10
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
ADDITION
PROGRAM
COMMENTS
MOV CX, 0000H
Initialize counter CX
MOV AX,[1200]
Get the first data in AX reg
MOV BX, [1202]
Get the second data in BX reg
ADD AX,BX
Add the contents of both the regs AX & BX
JNC L1
Check for carry
INC CX
If carry exists, increment the CX
L1 : MOV [1206],CX
Store the carry
MOV [1204], AX
Store the sum
HLT
Stop the program
SUBTRACTION
PROGRAM
COMMENTS
MOV CX, 0000H
Initialize counter CX
MOV AX,[1200]
Get the first data in AX reg
MOV BX, [1202]
Get the second data in BX reg
SUB AX,BX
Subtract the contents of BX from AX
JNC L1
Check for borrow
INC CX
If borrow exists, increment the CX
L1 : MOV [1206],CX
Store the borrow
MOV [1204], AX
Store the difference
HLT
Stop the program
ISSUE: 01 REVISION: 00
11
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
RESULT:
Thus the program for 16-bit addition and subtraction was verified
VIVA QUESTIONS:
1. What is Microprocessor ?
It is a program controlled semiconductor device (IC}, which fetches, decode and executes
instructions.
2. What is assembly language?
The language in which the mnemonics (short -hand form of instructions) are used to write a
program is called assembly language. The manufacturers of microprocessor give the mnemonics
3. Define bit, byte and word.
A digit of the binary number or code is called bit. Also, the bit is the fundamental storage unit of
computer memory. The 8-bit (8-digit) binary number or code is called byte and 16-bit
binary number or code is called word. (Some microprocessor manufactures refer the basic data
size operated by the processor as word)
ISSUE: 01 REVISION: 00
12
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
8086 PROGRAMMING
MULTIPLICATION & DIVISION
AIM:
To write an Assembly Language Program (ALP) for performing the multiplication and division
operation of 16-bit numbers.
APPARATUS REQUIRED:
8086 TRAINER KIT
ALGORITHM:
(i)
MULTIPLICATION OF 16-BIT NUMBERS:
Get the multiplier.
Get the multiplicand
Initialize the product to 0.
Product = product + multiplicand
Decrement the multiplier by 1
If multiplicand is not equal to 0,repeat from step (d) otherwise store the product.
(ii)
DIVISION OF 16-BIT NUMBERS.
Get the dividend
Get the divisor
Initialize the quotient to 0.
Dividend = dividend divisor
If the divisor is greater, store the quotient. Go to step g.
If dividend is greater, quotient = quotient + 1. Repeat from step (d)
Store the dividend value as remainder.
ISSUE: 01 REVISION: 00
13
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
FLOW CHART
MULTIPLICATION
DIVISION
Start
Start
Load Divisor &
Dividend
Get Multiplier & Multiplicand
QUOTIENT = 0
REGISTER=0
0
DIVIDEND =
DIVIDEND-DIVISOR
REGISTER = REGISTER
+ MULTIPLICAND
QUOTIENT = QUOTIENT+1
Multiplier=MUL
TIPLIER 1
IS
DIVIDEND
< DIVISOR
NO
NO
IS
MULTIPLIER
DIVISOR
YES
=0?
STORE QUOTIENT
YES
STORE REMAINDER
STORE THE RESULT
= DIVIDEND NOW
STOP
STOP
ISSUE: 01 REVISION: 00
14
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
MULTIPLICATION
PROGRAM
COMMENTS
MOV AX,[1200]
Get the first data
MOV BX, [1202]
Get the second data
MUL BX
Multiply both
MOV [1206],AX
Store the lower order product
MOV AX,DX
Copy the higher order product to AX
MOV [1208],AX
Store the higher order product
HLT
Stop the program
DIVISION
PROGRAM
COMMENTS
MOV AX,[1200]
Get the first data
MOV DX, [1202]
Get the second data
MOV BX, [1204]
Divide the dividend by divisor
DIV BX
Store the lower order product
MOV [1206],AX
Copy the higher order product to AX
MOV AX,DX
Store the higher order product
MOV [1208],AX
Stop the program
HLT
Get the first data
RESULT:
Thus the program for 16-bit multiplication and division was verified
ISSUE: 01 REVISION: 00
15
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
VIVA QUESTIONS:
1. What is the function of microprocessor in a system?
The microprocessor is the master in the system, which controls all the activity of the system. It
issues address and control signals and fetches the instruction and data from memory. Then it
executes the instruction to take appropriate action.
.
2. Define mnemonics.
The short-hand form of describing the instructions are called mnemonics. The mnemonics are
given by the manufacturers of microprocessors and programmable devices.
3. What is the need for timing diagram?
The timing diagram provides information regarding the status of various signals, when a machine
cycle is executed. The knowledge of timing diagram is essential for system designer to select
matched peripheral devices like memories, latches, ports, etc., to form a
microprocessor system
ISSUE: 01 REVISION: 00
16
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
8086 PROGRAMMING
ASCENDING & DESCENDING
AIM:
To write an Assembly Language Program (ALP) to sort a given array in
ascending and descending order.
APPARATUS REQUIRED:
8086 TRAINER KIT
ALGORITHM:
(i)
SORTING IN ASCENDING ORDER:
Load the array count in two registers C1 and C2.
Get the first two numbers.
Compare the numbers and exchange if necessary so that the two numbers are in ascending
order.
Decrement C2.
Get the third number from the array and repeat the process until C2 is 0.
Decrement C1 and repeat the process until C1 is 0.
(ii)
SORTING IN DESCENDING ORDER:
Load the array count in two registers C1 and C2.
Get the first two numbers.
Compare the numbers and exchange if necessary so that the two numbers are in descending
order.
Decrement C2.
Get the third number from the array and repeat the process until C2 is 0.
Decrement C1 and repeat the process until C1 is 0.
ISSUE: 01 REVISION: 00
17
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
ASCENDING
PROGRAM
COMMENTS
MOV SI,1200H
Initialize memory location for array size
MOV CL,[SI]
Number of comparisons in CL
L4 : MOV SI,1200H
Initialize memory location for array size
MOV DL,[SI]
Get the count in DL
INC SI
Go to next memory location
MOV AL,[SI]
Get the first data in AL
L3 : INC SI
Go to next memory location
MOV BL,[SI]
Get the second data in BL
CMP AL,BL
Compare two datas
JNB L1
If AL < BL go to L1
DEC SI
Else, Decrement the memory location
MOV [SI],AL
Store the smallest data
MOV AL,BL
Get the next data AL
JMP L2
Jump to L2
L1 : DEC SI
Decrement the memory location
MOV [SI],BL
Store the greatest data in memory location
L2 : INC SI
Go to next memory location
DEC DL
Decrement the count
JNZ L3
Jump to L3, if the count is not reached zero
MOV [SI],AL
Store data in memory location
DEC CL
Decrement the count
JNZ L4
Jump to L4, if the count is not reached zero
HLT
Stop
DESCENDING
PROGRAM
COMMENTS
MOV SI,1200H
Initialize memory location for array size
MOV CL,[SI]
Number of comparisons in CL
L4 : MOV SI,1200H
Initialize memory location for array size
MOV DL,[SI]
Get the count in DL
ISSUE: 01 REVISION: 00
18
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
INC SI
Go to next memory location
MOV AL,[SI]
Get the first data in AL
L3 : INC SI
Go to next memory location
MOV BL,[SI]
Get the second data in BL
CMP AL,BL
Compare two datas
JB L1
If AL > BL go to L1
DEC SI
Else, Decrement the memory location
MOV [SI],AL
Store the largest data
MOV AL,BL
Get the next data AL
JMP L2
Jump to L2
L1 : DEC SI
Decrement the memory location
MOV [SI],BL
Store the smallest data in memory location
L2 : INC SI
Go to next memory location
DEC DL
Decrement the count
JNZ L3
Jump to L3, if the count is not reached zero
MOV [SI],AL
Store data in memory location
DEC CL
Decrement the count
JNZ L4
Jump to L4, if the count is not reached zero
HLT
Stop
III YEAR
RESULT:
Thus the program for sorting the data inascending and descending order was verified
ISSUE: 01 REVISION: 00
19
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
VIVA QUESTIONS:
1. What are the modes in which 8086 can operate?
The 8086 can operate in two modes and they are minimum ( or uniprocessor) mode and maximum
( or multiprocessor) mode.
2. How clock signal is generated in 8086? What is the maximum internal
clock frequency of 8086?
The 8086 does not have on-chip clock generation circuit. Hence the clock generator chip, 8284 is
connected to the CLK pin of8086. The clock signal supplied by 8284 is divided by three for
internal use. The maximum internal clock frequency of8086 is 5MHz.
3. What are the functional units available in 8086 architecture?
The bus interface unit and execution unit are the two functional units available in 8086
architecture.
ISSUE: 01 REVISION: 00
20
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
8086 PROGRAMMING
LARGEST& SMALLEST
AIM:
To write an Assembly Language Program (ALP) to find the largest and
smallest number in a given array.
APPARATUS REQUIRED:
8086 TRAINER KIT
ALGORITHM:
(i)
FINDING LARGEST NUMBER:
Load the array count in a register C1.
Get the first two numbers.
Compare the numbers and exchange if the number is small.
Get the third number from the array and repeat the process until C1 is 0.
(ii)
FINDING SMALLEST NUMBER:
Load the array count in a register C1.
Get the first two numbers.
Compare the numbers and exchange if the number is large.
Get the third number from the array and repeat the process until C1 is 0.
ISSUE: 01 REVISION: 00
21
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
FLOW CHART
LARGEST
SMALLEST
START
START
INITIALIZE COUNT
INITIALIZE COUNT
POINTER MAX = 0
POINTER MIN = 0
PONITER =
POINTER + 1
PONITER =
POINTER + 1
YES
IS MAX
POINTER ?
IS MIN
POINTER ?
YES
NO
NO
MAX = POINTER
MIN = POINTER
COUNT = COUNT-1
COUNT = COUNT-1
NO
NO
IS COUNT = 0
IS COUNT = 0
?
YES
STORE MAXIMUM
STOP
ISSUE: 01 REVISION: 00
STORE MINIIMUM
STOP
22
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
LARGEST
PROGRAM
COMMENTS
MOV SI,1200H
Initialize array size
MOV CL,[SI]
Initialize the count
INC SI
Go to next memory location
MOV AL,[SI]
Move the first data in AL
DEC CL
Reduce the count
L2 : INC SI
Move the SI pointer to next data
CMP AL,[SI]
Compare two datas
JNB L1
If AL > [SI] then go to L1 ( no swap)
MOV AL,[SI]
Else move the large number to AL
L1 : DEC CL
Decrement the count
JNZ L2
If count is not zero go to L2
MOV DI,1300H
Initialize DI with 1300H
MOV [DI],AL
Else store the biggest number in 1300 location
HLT
Stop
SMALLEST
PROGRAM
COMMENTS
MOV SI,1200H
Initialize array size
MOV CL,[SI]
Initialize the count
INC SI
Go to next memory location
MOV AL,[SI]
Move the first data in AL
DEC CL
Reduce the count
L2 : INC SI
Move the SI pointer to next data
CMP AL,[SI]
Compare two datas
JB L1
If AL < [SI] then go to L1 ( no swap)
MOV AL,[SI]
Else move the large number to AL
L1 : DEC CL
Decrement the count
ISSUE: 01 REVISION: 00
23
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
JNZ L2
If count is not zero go to L2
MOV DI,1300H
Initialize DI with 1300H
MOV [DI],AL
Else store the biggest number in 1300 location
HLT
Stop
III YEAR
RESULT:
Thus the program for finding the largest and smallest data from a given array was verified
VIVA QUESTIONS:
1.
Write the flags of 8086.
The 8086 has nine flags and they are
1. Carry Flag (CF) 6. Overflow Flag (OF)
2. Parity Flag (PF) 7. Trace Flag (TF)
3. Auxiliary carry Flag (AF) 8. Interrupt Flag (IF)
4. Zero Flag (ZF) 9. Direction Flag (DF)
5. Sign Flag (SF)
2. What are control bits?
The flags TF, IF and DF of8086 are used to control the processor operation and so they are called
control bits
3. State the function of Direction flag in 8086.
Direction flag is used with string instructions. If DF= 0, the string is processed from its beginning
with the first element having the lowest address. Otherwise, the string is processed from the high
address towards the low address
ISSUE: 01 REVISION: 00
24
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
8086 PROGRAMMING
COPYING A STRING
AIM:
To move a string of length FF from source to destination.
APPARATUS REQUIRED:
8086 TRAINER KIT
ALGORITHM:
Initialize the data segment .(DS)
Initialize the extra data segment .(ES)
Initialize the start of string in the DS. (SI)
Initialize the start of string in the ES. (DI)
Move the length of the string(FF) in CX register.
Move the byte from DS TO ES, till CX=0.
PROGRAM
COMMENTS
MOV DI,1300H
Initialize destination address
MOV SI, 1400H
Initialize starting address
MOV CX, 0006H
Initialize array size
CLD
Clear direction flag
MOV AL, 08H
Store the string to be searched
REPNE SCASB
Scan until the string is found
DEC DI
Decrement the destination address
MOV BL,[DI]
Store the contents into BL reg
MOV [SI],BL
Store content of BL in source address
HLT
Stop
ISSUE: 01 REVISION: 00
25
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
FLOW CHART
START
Initialize DS,ES,SI,DI
CX=length of string, DF=0.
Move a byte from source string (DS)
to destination string (ES)
Decrement CX
Check for
ZF=1
STOP
RESULT:
Thus the program for copying a string of data from source to destination was verified
ISSUE: 01 REVISION: 00
26
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
VIVA QUESTIONS:
1. What is the function of READY signal?
This is the acknowledgment from the slow devices (or) memory that they have completed the
data transfer. The signal made available by the devices is synchronized by the 8284A clock
generator to provide ready input to the 8086. The signal is active high.
2. What is the operation of RD signal ?
Read signal RD when low, indicates the peripherals that the processor is performing a memory
(or) I/O read operation.
3. What is the function of DEN signal in minimum mode?
This signal indicates the availability of valid data over the address /data lines. It is used to enable
the Transceivers to separate the data from the multiplexed address / data signal.It is active from
the middle of T2 until the middle of T4 DEN is tristated during hold acknowledge
cycle.
ISSUE: 01 REVISION: 00
27
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
8086 PROGRAMMING
FIND AND REPLACE
AIM:
To find a character in the string and replace it with another character.
APPARATUS REQUIRED:
8086 TRAINER KIT
ALGORITHM:
Initialize the extra segment .(E S)
Initialize the start of string in the ES. (DI)
Move the number of elements in the string in CX register.
Move the byte to be searched in the AL register.
Store the ASCII code of the character that has to replace the scanned byte in BL
register.
Scan for the byte in ES. If the byte is not found, ZF1 and repeat scanning.
If the byte is found, ZF=1.Move the content of BL register to ES:DI.
PROGRAM
COMMENTS
MOV DI,1300H
Initialize destination address
MOV SI,1400H
Initialize starting address
MOV CX, 0006H
Initialize array size
CLD
Clear direction flag
MOV AL, 08H
Store the string to be searched
MOV BH,30H
Store the string to be replaced
REPNE SCASB
Scan until the string is found
ISSUE: 01 REVISION: 00
28
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
DEC DI
Decrement the destination address
MOV BL,[DI]
Store the contents into BL reg
MOV [SI],BL
Store content of BL in source address
MOV [DI],BH
Replace the string
HLT
Stop
III YEAR
FLOWCHART
START
Initialize DS, ES, SI, DI
CX=length of the string in ES,
DF=0.
DF=0.
Scan for a particular character
specified in AL Register.
Check for ZF=1
Move the content of BL
to ES:DI
STOP
ISSUE: 01 REVISION: 00
29
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
RESULT:
Thus the program for finding a data and replacing tha data from a given string of data was
verified
VIVA QUESTIONS:
1. What is the fabrication technology used for 8086?
The 8086 is fabricated using the HMOS (High density n-type metal oxide silicon field effect
transistors) technology and contains approximately 29,000 transistors. The 8086 packed in a 40
pin DIP and requires a single 5V supply.
2. What is multimicro-processor architecture ?
The maximum clock frequency at which a system operate may be considered as one of the
measure of the processor capability of the system.An appropriate system involving several
microprocessors connected using a certain topology ma provide high processing capacity. The
study of such a system known as multi micro processor architecture.
3. What are the functional parts of simple multi micro processor system ?
The simplest type of multimicroprocessor system is one containing a CPU and a numeric data
processor (NDP) and/or an Input / Output processor (IOP)
ISSUE: 01 REVISION: 00
30
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
8086 INTERFACING
INTERFACING ANALOG TO DIGITAL CONVERTER
AIM:
To write an assembly language program to convert an analog signal into a digital signal using an
ADC interfacing.
APPARATUS REQUIRED:
8086 TRAINER KIT
ADC Interface board
THEORY:
An ADC usually has two additional control lines: the SOC input to tell the ADC when to start the
conversion and the EOC output to announce when the conversion is complete. The following program
initiates the conversion process, checks the EOC pin of ADC 0809 as to whether the conversion is over
and then inputs the data to the processor. It also instructs the processor to store the converted digital data
at RAM location.
ALGORITHM:
Select the channel and latch the address.
Send the start conversion pulse.
Read EOC signal.
If EOC = 1 continue else go to step (iii)
Read the digital output.
Store it in a memory location
ISSUE: 01 REVISION: 00
31
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
FLOW CHART
START
SELECT THE CHANNEL AND LATCH ADDRESS
SEND THE START CONVERSION PULSE
NO
IS EOC = 1?
YES
READ THE DIGITALOUTPUT
STORE THE DIGITAL VALUE IN THE MEMORY
LOCATION SPECIFIED
STOP
PROGRAM
COMMENTS
MOV AL,00
Load accumulator with value for ALE high
OUT 0C8H,AL
Send through output port
MOV AL,08
Load accumulator with value for ALE low
OUT 0C8H,AL
Send through output port
MOV AL,01
Store the value to make SOC high in the accumulator
ISSUE: 01 REVISION: 00
32
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
OUT 0D0H,AL
III YEAR
Send through output port
MOV AL,00
MOV AL,00
Introduce delay
MOV AL,00
MOV AL,00
Store the value to make SOC low the accumulator
OUT 0D0H,AL
Send through output port
L1 : IN AL, 0D8H
AND AL,01
Read the EOC signal from port & check for end of conversion
CMP AL,01
JNZ L1
If the conversion is not yet completed, read EOC signal from
port again
IN AL,0C0H
Read data from port
MOV BX,1100
Initialize the memory location to store data
MOV [BX],AL
Store the data
HLT
Stop
RESULT:
Thus the program for converting an input analog signal into digital was verified
VIVA QUESTIONS:
1. What are the flag manipulation instructions of 8086.
LAHF : Load AH from low byte of flag register.
SAHF : Store AH to low byte of flag register
PUSHF : Push content of flag to the stack.
POPF : Pop content of stack and load it in the
flag register.
2. What are the three groups of signals in 8086 ?
The 8086 signals are categorized in three groups. They are :
i. The signals having common function in minimum and maximum mode.
ii. The signals having special functions for minimum mode,
iii. The signals having special functions for maximum mode.
ISSUE: 01 REVISION: 00
33
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
3. What are the uses of AD0 AD15 lines ?
These are the time multiplexed memory 15 address and data lines.
Address remains on the line during T I state ,while data is available on the data bus during T2,
T3, TW and T4. Here Ti' T2, T3, T4 and Tw are the clock states of a machine , cycle. Tw is a
wait state. These lines are active high and float to a tristate during interrupt acknowledge and
local bus hold acknowledge cycles.
8086 INTERFACING
INTERFACING DIGITAL TO ANALOG CONVERTER
AIM :
1. To write an assembly language program for digital to analog conversion
2. To convert digital inputs into analog outputs & To generate different waveforms
APPARATUS REQUIRED:
8086 TRAINER KIT
DAC Interface board
THEORY:
Since DAC 0800 is an 8 bit DAC and the output voltage variation is between 5v and +5v. The
output voltage varies in steps of 10/256 = 0.04 (approximately). The digital data input and the
corresponding output voltages are presented in the table. The basic idea behind the generation of
waveforms is the continuous generation of analog output of DAC. With 00 (Hex) as input to DAC2 the
analog output is 5v. Similarly with FF H as input, the output is +5v. Outputting digital data 00 and FF at
regular intervals, to DAC2, results in a square wave of amplitude 5v.Output digital data from 00 to FF in
constant steps of 01 to DAC2. Repeat this sequence again and again. As a result a saw-tooth wave will be
generated at DAC2 output. Output digital data from 00 to FF in constant steps of 01 to DAC2. Output
digital data from FF to 00 in constant steps of 01 to DAC2. Repeat this sequence again and again. As a
result a triangular wave will be generated at DAC2 output.
ALGORITHM:
Measurement of analog voltage:
Send the digital value of DAC.
Read the corresponding analog value of its output.
ISSUE: 01 REVISION: 00
34
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
WAVEFORM GENERATION:
SQUARE WAVEFORM:
Send low value (00) to the DAC.
Introduce suitable delay.
Send high value to DAC.
Introduce delay.
Repeat the above procedure.
SAW-TOOTH WAVEFORM:
Load low value (00) to accumulator.
Send this value to DAC.
Increment the accumulator.
Repeat step (ii) and (iii) until accumulator value reaches FF.
Repeat the above procedure from step 1.
TRIANGULAR WAVEFORM:
Load the low value (00) in accumulator.
Send this accumulator content to DAC.
Increment the accumulator.
Repeat step 2 and 3 until the accumulator reaches FF, decrement the
accumulator and send the accumulator contents to DAC.
Decrementing and sending the accumulator contents to DAC.
The above procedure is repeated from step (i)
ISSUE: 01 REVISION: 00
35
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
FLOW CHART
MEASUREMENT OF ANALOG VOLTAGE
START
SEND THE DIGITALVALUE TO
ACCUMULATOR
SQUARE WAVE FORM
START
INTIALISE THE ACCUMULATOR SEND
ACC CONTENT TO DAC
DELAY
TRANSFER THE ACCUMULATOR
CONTENTS TO DAC
READ THE CORRESPONDING
ANALOG VALUE
LOAD THE ACC WITH MAX VALUE
SEND ACC CONTENT TO DAC
DELAY
STOP
ISSUE: 01 REVISION: 00
36
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
SAWTOOTH WAVEFORM
III YEAR
TRIANGULAR
START
START
INITIALIZE
ACCUMULATOR
INITIALIZE
ACCUMULATOR
SEND ACCUMULATOR
CONTENT TO DAC
SEND ACCUMULATOR
INCREMENT ACCUMULATOR
CONTENT
CONTENT TO DAC
YES
INCREMENT ACCUMULATOR
CONTENT
IS ACC
FF
NO
NO
YES
DECREMENT ACCUMULATOR
CONTENT
IS ACC
FF
SEND ACCUMULATOR
CONTENT TO DAC
IS ACC 00
YES
ISSUE: 01 REVISION: 00
NO
37
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
MEASUREMENT OF ANALOG VOLTAGE:
PROGRAM
COMMENTS
MOV AL,7FH
Load digital value 00 in accumulator
OUT C0,AL
Send through output port
HLT
Stop
DIGITAL DATA
ANALOG VOLTAGE
PROGRAM: SQUARE WAVE
PROGRAM
COMMENTS
L2 : MOV AL,00H
Load 00 in accumulator
OUT C0,AL
Send through output port
CALL L1
Give a delay
MOV AL,FFH
Load FF in accumulator
OUT C0,AL
Send through output port
CALL L1
Give a delay
JMP L2
Go to starting location
L1 : MOV CX,05FFH
Load count value in CX register
L3 : LOOP L3
Decrement until it reaches zero
RET
Return to main program
PROGRAM TABLE: SAW TOOTH WAVE
PROGRAM
L2 : MOV AL,00H
ISSUE: 01 REVISION: 00
COMMENTS
Load 00 in accumulator
38
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
L1 : OUT C0,AL
Send through output port
INC AL
Increment contents of accumulator
JNZ L1
Send through output port until it reaches FF
JMP L2
Go to starting location
III YEAR
PROGRAM TABLE: TRIANGULAR WAVE
PROGRAM
COMMENTS
L3 : MOV AL,00H
Load 00 in accumulator
L1 : OUT C0,AL
Send through output port
INC AL
Increment contents of accumulator
JNZ L1
Send through output port until it reaches FF
MOV AL,0FFH
Load FF in accumulator
L2 : OUT C0,AL
Send through output port
DEC AL
Decrement contents of accumulator
JNZ L2
Send through output port until it reaches 00
JMP L3
Go to starting location
WAVEFORMS
AMPLITUDE
TIMEPERIOD
Square Waveform
Saw-tooth waveform
Triangular waveform
RESULT:
Thus the program for converting a digital signal into analog was verified
ISSUE: 01 REVISION: 00
39
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
STEPPER MOTOR INTERFACING
AIM:
To write an assembly language program in 8086 to rotate the motor at different speeds.
APPARATUS REQUIRED:
8086 TRAINER KIT
STEPPER MOTOR INTERFACE BOARD
STEPPER MOTOR
THEORY:
A motor in which the rotor is able to assume only discrete stationary angular position is a
stepper motor. The rotary motion occurs in a stepwise manner from one equilibrium position to the
next.Two-phase scheme: Any two adjacent stator windings are energized. There are two magnetic fields
active in quadrature and none of the rotor pole faces can be in direct alignment with the stator poles. A
partial but symmetric alignment of the rotor poles is of course possible.
ALGORITHM:
For running stepper motor clockwise and anticlockwise directions
(i)
(ii)
(iii)
(iv)
(v)
Get the first data from the lookup table.
Initialize the counter and move data into accumulator.
Drive the stepper motor circuitry and introduce delay
Decrement the counter is not zero repeat from step(iii)
Repeat the above procedure both for backward and forward directions.
SWITCHING SEQUENCE OF STEPPER MOTOR:
MEMORY
LOCATION
A1
A2
B1
B2
HEX
CODE
4500
09 H
4501
05 H
4502
06 H
4503
0A H
ISSUE: 01 REVISION: 00
40
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
FLOW CHART
START
INTIALIZE COUNTER FOR LOOK UP TABLE
GET THE FIRST DATA FROM THE ACCUMULATOR
MOVE DATA INTO THE ACCUMULATOR
DRIVE THE MOTOR CIRCUITARY
DELAY
DECREMENT COUNTER
YES
IS B = 0 ?
NO
GET THE DATA FROM LOOK UP TABLE
ISSUE: 01 REVISION: 00
41
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
PROGRAM
COMMENTS
START : MOV DI, 1200H
Initialize memory location to store the array of number
MOV CX, 0004H
Initialize array size
LOOP 1 : MOV AL,[DI]
Copy the first data in AL
OUT 0C0,AL
Send it through port address
III YEAR
MOV DX, 1010H
L1 : DEC DX
Introduce delay
JNZ L1
INC DI
Go to next memory location
LOOP LOOP1
Loop until all the datas have been sent
JMP START
Go to start location for continuous rotation
1200 : 09,05,06,0A
Array of datas
RESULT:
Thus the program for rotating a stepper motor at different speed was verified
ISSUE: 01 REVISION: 00
42
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
INTERFACING PRGRAMMABLE KEYBOARD AND DISPLAY CONTROLLER- 8279
AIM :
To display the rolling message HELP US in the display.
APPARATUS REQUIRED:
8086 Microprocessor kit, Power supply, Interfacing board.
ALGORITHM :
Display of rolling message HELP US
1.
2.
3.
4.
5.
6.
7.
Initialize the counter
Set 8279 for 8 digit character display, right entry
Set 8279 for clearing the display
Write the command to display
Load the character into accumulator and display it
Introduce the delay
Repeat from step 1.
1. Display Mode Setup: Control word-10 H
0
0
0
0
0
0
1
D
0
D
0
K
0
K
0
K
DD
00- 8Bit character display left entry
01- 16Bit character display left entry
10- 8Bit character display right entry
11- 16Bit character display right entry
KKK- Key Board Mode
000-2Key lockout.
ISSUE: 01 REVISION: 00
43
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
2.Clear Display: Control word-DC H
CD
CD
11
1-Enables Clear display 11
CD
CF
CA
A0-3; B0-3 =FF
A0-3; B0
0-Contents of RAM will be displayed
1-FIFO Status is cleared
1-Clear all bits
(Combined effect of CD)
3. Write Display: Control word-90H
1
1
0
0
AI
ISSUE: 01 REVISION: 00
44
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
FLOWCHART
SET UP POINTER
INITIALIZE THE COUNTER
SET 8279 FOR 8-DIGIT CHARACTER DISPLAY
SET 8279 FOR CLEARING THE
DISPLAY
WRITE THE COMMAND TO DISPLAY
LOAD THE CHARACTER INTO ACCUMULATOR
AND DISPLAY
DELAY
PROGRAM
COMMENTS
START : MOV SI,1200H
Initialize array
MOV CX,000FH
Initialize array size
MOV AL,10
Store the control word for display mode
OUT C2,AL
Send through output port
MOV AL,CC
Store the control word to clear display
OUT C2,AL
Send through output port
MOV AL,90
Store the control word to write display
ISSUE: 01 REVISION: 00
45
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
OUT C2,AL
Send through output port
L1 : MOV AL,[SI]
Get the first data
OUT C0,AL
Send through output port
CALL DELAY
Give delay
INC SI
Go & get next data
LOOP L1
Loop until all the datas have been taken
JMP START
Go to starting location
DELAY : MOV DX,0A0FFH
Store 16bit count value
LOOP1 : DEC DX
Decrement count value
JNZ LOOP1
Loop until count values becomes zero
RET
Return to main program
III YEAR
RESULT:
Thus the program to display the rolling message HELP US in the display was verified.
ISSUE: 01 REVISION: 00
46
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
INTERFACING PROGRAMMABLE TIMER-8253
AIM:
To study different modes of operation of programmable timer 8253
APPARATUS REQUIRED:
8086 trainer kit
8253 interfacing kit
CRO
THEORY:
The main features of the timer are,
i.
Three independent 16-bit counters
ii.
Input clock from DC to 2 MHz
iii.
Programmable counter modes
iv.
Count binary or BCD
The control signals with which the 8253 interfaces with the CPU are CS, RD, WR, A1,
A2.The basic operations performed by 8253 are determined by these control signals. It
has six different modes of operation, viz, mode 0 to mode 5.
MODE 2 RATE GENERATOR
It is a simple divide - by N counter. The output will be low for one input clock period. The
period from one output pulse to the next equals the number of input counts in the register. If the register is
reloaded between output pulses, the present period will not be affected, but the subsequent period will
reflect the new value.
MODE 3 SQUARE WAVE GENERATOR
It is similar to mode 2, except that the output will remain high until one half for even number
count, If the count is odd, the output will be high for (count+1)/2 counts and low for (count-1)/2 counts
ISSUE: 01 REVISION: 00
47
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
ALGORITHM:
Mode 21.
2.
3.
4.
5.
Initialize channel 0 in mode 2
Initialize the LSB of the count.
Initialize the MSB of the count.
Trigger the count
Read the corresponding output in CRO.
Mode 31.
2.
3.
4.
5.
Initialize channel 0 in mode 3
Initialize the LSB of the count.
Initialize the MSB of the count.
Trigger the count
Read the corresponding output in CRO.
PORT ADDRESS :
1.
2.
3.
4.
5.
6.
7.
CONTROL REGISTER
COUNTER OF CHANNEL 0
COUNTER OF CHANNEL 1
COUNTER OF CHANNEL 2
O/P PORT OF CHANNEL 0
O/P PORT OF CHANNEL 1
O/P PORT OF CHANNEL 2
CONTROL WORD FORMAT:
D7
D6
D5
D4
D3
D2
D1
D0
SC1
SC0
RL1
RL0
M2
M1
M0
BCD
ISSUE: 01 REVISION: 00
Mode 2 =
34 H
48
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
SC1
SC0
CHANNEL SELECT
RL1
RL0
READ/LOAD
CHANNEL 0
LATCH
CHANNEL 1
LSB
CHANNEL 2
MSB
-----
LSB FIRST, MSB NEXT
BCD --0 BINARY COUNTER
III YEAR
1 --BCD COUNTER
M2
M1
M0
MODE
MODE 0
MODE 1
MODE 2
MODE 3
MODE 4
MODE 5
MODE 2 RATE GENERATOR:
PROGRAM
COMMENTS
MOV AL, 34H
Store the control word in accumulator
OUT 0BH
Send through output port
MOV AL, 0AH
Copy lower order count value in accumulator
OUT 08H
Send through output port
MOV AL, 00H
Copy higher order count value in accumulator
OUT 08H
Send through output port
HLT
Stop
ISSUE: 01 REVISION: 00
49
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
MODE 3 SQUARE WAVE GENERATOR:
PROGRAM
COMMENTS
MOV AL, 36H
Store the control word in accumulator
OUT 0BH
Send through output port
MOV AL, 0AH
Copy lower order count value in accumulator
OUT 08H
Send through output port
MOV AL, 00H
Copy higher order count value in accumulator
OUT 08H
Send through output port
HLT
Stop
FLOW CHART
START
INITIALIZE ACCUMULATOR
WITH MODE SET WORD
INITIALIZE LSB OF COUNT
INITIALIZE MSB OF COUNT
TRIGGER THE COUNT
STOP
RESULT
Thus the program for programmable timer 8253 and its different modes of operation was executed
successfully
ISSUE: 01 REVISION: 00
50
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
INTERFACING USART 8251
AIM:
To study interfacing technique of 8251 (USART) with microprocessor 8086 and write an 8086
ALP to transmit and receive data between two serial ports with RS232 cable.
APPARATUS REQUIRED:
8086 kit (2 Nos), RS232 cable.
THEORY:
The 8251 is used as a peripheral device for serial communication and is programmed by the
CPU to operate using virtually any serial data transmission technique. The USART accepts data
characters from the CPU in parallel format and then converts them into a continuous serial data stream for
transmission. Simultaneously, it can receive serial data streams and convert them into parallel data
characters for the CPU. The CPU can read the status of the USART at any time. These include data
transmission errors and control signals. The control signals define the complete functional definition of
the 8251. Control words should be written into the control register of 8251.These control words are split
into two formats: 1) Mode instruction word & 2) Command instruction word. Status word format is used
to examine the error during functional operation.
1...transmit enable
1...data terminal ready
1... receive enable
1... send break character
1.... reset error flags (pe,oe,fe)
1..... request to send (rts)
1...... internal reset
1....... enter hunt mode (enable search for sync characters)
ISSUE: 01 REVISION: 00
51
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
1 ransmitter ready
1. receiver ready
1.. transmitter empty
1... parity error (pe)
1.... overrun error (oe)
1..... framing error (fe), async only
1...... sync detect, sync only
1....... data set ready (dsr)
ALGORITHM:
1. Initialize 8253 and 8251 to check the transmission and reception of a character
2. Initialize8253 to give an output of 150Khz at channel 0 which will give a 9600 baud rate of 8251.
3. The command word and mode word is written to the 8251 to set up for subsequent operations
ISSUE: 01 REVISION: 00
52
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
4. The status word is read from the 8251 on completion of a serial I/O operation, or when the host CPU
is checking the status of the device before starting the next I/O operation
PROGRAM: TRANSMITTER END
PROGRAM
COMMENTS
MOV AL,36
Initialize 8253 in mode 3 square wave generator
OUT CE,AL
Send through port address
MOV AL,10
Initialize AL with lower value of count (clock frequency 150KHz)
OUT C8,AL
Send through port address
MOV AL,00
Initialize AL with higher value of count
OUT C8,AL
Send through port address
MOV AL,4E
Set mode for 8251(8bit data, No parity, baud rate factor 16x & 1 stop bit)
OUT C2,AL
Send through port address
MOV AL,37
Set command instruction(enables transmit enable & receive enable bits)
OUT C2,AL
Send through port address
L1:IN AL,C2
Read status word
AND AL,04
Check whether transmitter ready
JZ L1
If not wait until transmitter becomes ready
MOV AL,41
Set the data as 41
OUT C0,AL
Send through port address
INT 2
Restart the system
RECEIVER END
PROGRAM
COMMENTS
MOV AL,36
Initialize 8253 in mode 3 square wave generator
OUT CE,AL
Send through port address
MOV AL,10
Initialize AL with lower value of count (clock frequency 150KHz)
OUT C8,AL
Send through port address
MOV AL,00
Initialize AL with higher value of count
OUT C8,AL
Send through port address
MOV AL,4E
Set mode for 8251(8bit data, No parity, baud rate factor 16x & 1 stop bit)
OUT C2,AL
Send through port address
MOV AL,37
Set command instruction(enables transmit enable & receive enable bits)
ISSUE: 01 REVISION: 00
53
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
OUT C2,AL
Send through port address
L1:IN AL,C2
Read status word
AND AL,02
Check whether receiver ready
JZ L1
If not wait until receiver becomes ready
IN AL,C0
If it is ready, get the data
MOV BX,1500
Initialize BX register with memory location to store the data
MOV [BX],AL
Store the data in the memory location
INT 2
Restart the system
III YEAR
RESULT:
Thus the program for transmitting and receiving a data serially was executed successfully.
ISSUE: 01 REVISION: 00
54
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
INTERFACING PPI 8255
AIM:
To write ALP by interfacing 8255 with 8086 in mode 0, mode 1 and mode 2
APPARATUS REQUIRED:
8086 kit, 8255 interface kit.
ALGORITHM:
Mode 0
1. Initialize accumulator to hold control word
2. store control word in control word register
3. Read data port A.
4. Store data from port A in memory
5. Place contents in port B
Mode 1 & Mode 2
1. Initialize accumulator to hold control word (for port A)
2. Store control word in control word register
3. Initialize accumulator to hold control word (for port B)
4. Place contents in control word register.
5. Disable all maskable interrupts, enable RST 5.5
6. send interrupt mask for RST 6.5 & 7.5
7. Enable interrupt flag
8. Read data from port A, place contents in port B
ISSUE: 01 REVISION: 00
55
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
FLOWCHART
Mode 0
Mode 1 & 2
START
START
Store control word in
control register
Store control word in control register
Input to be read from port A
Input to be read from port A
Store into accumulator
Disable all interrupts except RST 6.5
Output written on port B
Store output to port B
STOP
STOP
MODE 0
PROGRAM
COMMENTS
MOV AL,90H
Set the control word
OUT C6,AL
Send it to control port
IN AL,C0
Get the contents of port A in AL
OUT C2,AL
Send the contents of port B to port address
HLT
Stop
ISSUE: 01 REVISION: 00
56
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
MODE 1
PROGRAM
COMMENTS
MOV AL,0B0H
Set the control word for mode 1
OUT C6,AL
Send it to control port
MOV AL,09H
Control for BSR mode
OUT C6,AL
Send it to control port
MOV AL,13H
Interrupt generation
OUT 30,AL
MOV AL,0AH
Through 8259
OUT 32,AL
MOV AL,0FH
Using IR2 interrupt(lower order count)
OUT 32,AL
MOV AL,00H
Higher order count
OUT 32,AL
STI
Set trap flag
HLT
Stop
ISR:
Subroutine
IN AL,C0
Read from Port A
OUT C2,AL
Send it to Port B
HLT
Stop
ISSUE: 01 REVISION: 00
57
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
MODE 2
PROGRAM
COMMENTS
MOV AL,0C0H
Set the control word for mode 2
OUT C6,AL
Send it to control port
MOV AL,09H
Control for BSR mode
OUT C6,AL
Send it to control port
MOV AL,13H
Interrupt generation
OUT 30,AL
MOV AL,0AH
Through 8259
OUT 32,AL
MOV AL,0FH
Using IR2 interrupt(lower order count)
OUT 32,AL
MOV AL,00H
Higher order count
OUT 32,AL
STI
Set trap flag
HLT
Stop
ISR:
Subroutine
IN AL,C0
Read from Port A
OUT C2,AL
Send it to Port B
HLT
Stop
Result:
Thus the program for interfacing a PPI was executed successfully
ISSUE: 01 REVISION: 00
58
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
8051 PROGRAMMING
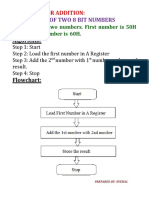
8 BIT ADDITION
AIM:
To write a program to add two 8-bit numbers using 8051 microcontroller.
APPARATUS REQUIRED
8051 trainer kit
ALGORITHM:
Clear Program Status Word.
Select Register bank by giving proper values to RS1 & RS0 of PSW.
Load accumulator A with any desired 8-bit data.
Load the register R 0 with the second 8- bit data.
Add these two 8-bit numbers.
Store the result.
Stop the program.
ADDRESS
MNEMONIC
OPERAND
HEX
CODE
COMMENTS
4100
CLR
C3
Clear CY Flag
4101
MOV
A, data1
74,data1
Get the data1 in
Accumulator
4103
ADDC
A, # data 2
24,data2
Add the data1 with data2
4105
MOV
DPTR, #
4500H
90,45,00
Initialize the memory
location
4108
MOVX
@ DPTR, A
F0
Store the result in memory
location
SJMP
L1
80,FE
Stop the program
4109
LABEL
L1
ISSUE: 01 REVISION: 00
59
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
FLOW CHART
START
Clear PSW
Select Register
Bank
Load A and R 0
with 8- bit datas
Add A & R 0
Store the sum
STOP
RESULT:
Thus the program for 8-bit addition using 8051 was executed.
ISSUE: 01 REVISION: 00
60
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
VIVA QUESTIONS:
1.What is mean by microcontroller?
A device which contains the microprocessor with integrated peripherals like memory, serial ports,
parallel ports, timer/counter, interrupt controller, data acquisition interfaces like
ADC,DAC is called microcontroller.
2.Explain DJNZ instructions of intel 8051 microcontroller?
a. DJNZ Rn, rel
Decrement the content of the register Rn and jump if not zero.
b. DJNZ direct , rel
Decrement the content of direct 8-bit address and jump if not zero.
3.Explain the contents of the accumulator after the execution ot the following program segments:
MOV A,#3CH
MOV R4,#66H
ANL A,R4
A 3C
R4 66
A 24
ISSUE: 01 REVISION: 00
61
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
8 BIT SUBTRACTION
AIM:
To perform subtraction of two 8 bit data using 8051 microcontroller and store the result in memory.
APPARATUS REQUIRED
8051 trainer kit
ALGORITHM:
a.
b.
c.
d.
e.
f.
Clear the carry flag.
Initialize the register for borrow.
Get the first operand into the accumulator.
Subtract the second operand from the accumulator.
If a borrow results increment the carry register.
Store the result in memory.
ADDRESS
MNEMONIC
OPERAND
HEX
CODE
COMMENTS
4100
CLR
C3
Clear CY flag
4101
MOV
A, # data1
74, data1
Store data1 in
accumulator
4103
SUBB
A, # data2
94,data2
Subtract data2 from
data1
4105
MOV
DPTR, # 4500
90,45,00
Initialize memory
location
4108
MOVX
@ DPTR, A
F0
Store the difference in
memory location
SJMP
L1
80,FE
Stop
4109
LABEL
L1
ISSUE: 01 REVISION: 00
62
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
FLOWCHART
START
CLEAR CARRY
FLAG
GET IST
OPERAND IN
ACCR
SUBTRACT THE
2ND OPERAND
FROM ACCR
N
IS CF=1
Y
INCREMENT
THE BORROW
REGISTER
STORE
RESULT IN
MEMORY
STOP
RESULT
Thus the program for 8-bit subtraction using 8051 was executed
ISSUE: 01 REVISION: 00
63
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
8051 PROGRAMMING
8 BIT MULTIPLICATION
AIM:
To perform multiplication of two 8 bit data using 8051 microcontroller and store the result in
memory.
APPARATUS REQUIRED
8051 trainer kit
ALGORITHM:
a.
b.
c.
d.
Get the multiplier in the accumulator.
Get the multiplicand in the B register.
Multiply A with B.
Store the product in memory.
ADDRESS
MNEMONIC
OPERAND
HEX
CODE
COMMENTS
4100
MOV
A ,#data1
74, data1
Store data1 in
accumulator
4102
MOV
B, #data2
75,data2
Store data2 in B reg
4104
MUL
A,B
F5,F0
Multiply both
4106
MOV
DPTR, # 4500H
90,45,00
Initialize memory
location
4109
MOVX
@ DPTR, A
F0
Store lower order result
401A
INC
DPTR
A3
Go to next memory
location
410B
MOV
A,B
E5,F0
410D
MOV
@ DPTR, A
F0
Store higher order result
SJMP
STOP
80,FE
Stop
410E
LABEL
STOP
ISSUE: 01 REVISION: 00
64
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
FLOW CHART
START
GET
MULTIPLIER
IN ACCR
GET
MULTIPLICAND
IN B REG
MULTIPLY A
WITH B
STORE
RESULT IN
MEMORY
STOP
RESULT
Thus the program for 8-bit multiplication using 8051 was executed
ISSUE: 01 REVISION: 00
65
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
8051 PROGRAMMING
8 BIT DIVISION
AIM:
To perform division of two 8 bit data using 8051 microcontroller and store the result in memory.
APPARATUS REQUIRED
8051 trainer kit
ALGORITHM:
1.
2.
3.
4.
ADDRESS
Get the Dividend in the accumulator.
Get the Divisor in the B register.
Divide A by B.
Store the Quotient and Remainder in memory.
MNEMONIC
OPERAND
HEX
CODE
COMMENTS
4100
MOV
A, # data1
74,data1
Store data1 in accumulator
4102
MOV
B, # data2
75,data2
Store data2 in B reg
4104
DIV
A,B
84
Divide
4015
MOV
DPTR, # 4500H
90,45,00
Initialize memory location
4018
MOVX
@ DPTR, A
F0
Store remainder
4109
INC
DPTR
A3
Go to next memory
location
410A
MOV
A,B
E5,F0
410C
MOV
@ DPTR, A
F0
Store quotient
SJMP
STOP
80,FE
Stop
410D
LABEL
STOP
ISSUE: 01 REVISION: 00
66
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
FLOW CHART
START
GET DIVIDEND
IN ACCR
GET DIVISOR IN
B REG
DIVIDE A BY B
STORE
QUOTIENT &
REMAINDER
IN MEMORY
STOP
RESULT
Thus the program for 8-bit division using 8051 was executed
ISSUE: 01 REVISION: 00
67
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
LOGICAL AND BIT MANIPULATION
AIM:
To write an ALP to perform logical and bit manipulation operations using 8051 microcontroller.
APPARATUS REQUIRED:
8051 microcontroller kit
ALGORITHM:
1.
2.
3.
4.
5.
6.
7.
8.
Initialize content of accumulator as FFH
Set carry flag (cy = 1).
AND bit 7 of accumulator with cy and store PSW format.
OR bit 6 of PSW and store the PSW format.
Set bit 5 of SCON.
Clear bit 1 of SCON.
Move SCON.1 to carry register.
Stop the execution of program.
FLOWCHART
START
Set CY flag, AND CY with MSB of
ACC
Store the PSW format, OR CY with bit 2 IE reg
Clear bit 6 of PSW, Store PSW
Set bit 5 of SCON , clear bit 1 and store
SCON
Move bit 1 of SCON to CY and store PSW
STOP
ISSUE: 01 REVISION: 00
68
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
ADDRESS
HEX
CODE
4100
LABEL
III YEAR
MNEMONICS
OPERAND
COMMENT
90,45,00
MOV
DPTR,#4500
Initialize memory location
4103
74,FF
MOV
A,#FF
Get the data in accumulator
4105
D3
SETB
Set CY bit
4016
82,EF
ANL
C, ACC.7
Perform AND with 7th bit of
accumulator
4018
E5,D0
MOV
A,DOH
410A
F0
MOVX
@DPTR,A
Store the result
410B
A3
INC
DPTR
Go to next location
410C
72,AA
ORL
C, IE.2
OR CY bit with 2nd bit if IE
reg
410E
C2,D6
CLR
PSW.6
Clear 6th bit of PSW
4110
E5,D0
MOV
A,DOH
4112
F0
MOVX
@DPTR,A
Store the result
4113
A3
INC
DPTR
Go to next location
4114
D2,90
SETB
SCON.5
Set 5th of SCON reg
4116
C2,99
CLR
SCON.1
Clear 1st bit of SCON reg
4118
E5,98
MOV
A,98H
411A
F0
MOVX
@DPTR,A
Store the result
411B
A3
INC
DPTR
Go to next location
411C
A2,99
MOV
C,SCON.1
Copy 1st bit of SCON reg to
CY flag
411E
E5,D0
MOV
A,DOH
4120
F0
MOVX
@DPTR,A
Store the result
4122
80,FE
SJMP
L2
Stop
L2
ISSUE: 01 REVISION: 00
69
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
PROGRAMS FOR DIGITAL CLOCK AND STOP WATCH (USING 8086)
AIM:
To write an ALP to display the messages for every sec using 8086.
APPARATUS REQUIRED:
8086 Trainer kit
Program that places a message on the screen every 10 seconds, using int 1ah;
CODE SEGMENT
TIMEDELAY:
MOV SP,1000H
MOV DI,10XD
TIME OUT:
MOV AH,00H
INT 1AH
MOV BX,DX
TIMER:
MOV AH, 00H
INT 1AH
SUB DX, BX
CMP DX, 182XD
JC TIMER
MOV AH, 09H
CS
MOV DX,MSG
INT 21H
DEC DI
JNZ TIMEOUT
MOV AX,4C00H
INT 21H
MSG:
ISSUE: 01 REVISION: 00
70
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
DB 'TEN MORE SECONDS HAVE PASSED $'
CODE ENDS
RESULT:
Thus an ALP program for digital clock and stop watch was executed and verified
successfully.
ISSUE: 01 REVISION: 00
71
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
PROGRAMS TO VERIFY TIMER, INTERRUPTS & UART OPERATIONS IN 8031
MICROCONTROLLER
AIM:
To write the alp to verify the interrupts and UART operations using microcontroller
APPARATUS REQUIRED:
8051 microcontroller kit
a) Program to generate a square wave of frequency --------.
Steps to determine the count:
Let the frequency of sqaurewave to be generated be Fs KHz.
And the time period of the squarewave be Ts Sec.
Oscillator Frequency = 11.0592MHz.
One machine cycle = 12 clock periods
Time taken to complete one machine cycle=12*(1/11.0592MHz)= 1.085microsec.
Y(dec) = (Ts/2)/(1.085microsec)
Count(dec) = 65536(dec) Y(dec)
= Count(hexa)
PROGRAM
MOV TMOD,#10h
L1:
; To select timer1 & mode1 operation
MOV TL1,#LOWERORDER BYTE OF THE COUNT
MOV TH1,#HIGHER ORDER BYTE OF THE COUNT
SETB TR1
BACK: JNB TF1,BACK
ISSUE: 01 REVISION: 00
; to start the timer (TCON.6)
; checking the status of timerflag1(TCON.7) for
72
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
overflow
CPL Px.x
; get the square wave through any of the portpins
; eg. P1.2 (second bit of Port 1)
CLR TR1
; stop timer
CLR TF1
; clear timer flag for the next cycle
SJMP L1
b) Program to transfer a data serially from one kit to another.
Transmitter:
MOV TMOD,#20H
; Mode word to select timer1 & mode 2
MOV TL1,#FDH
; Initialize timer1 with the count
MOV TH1,#FFH
MOV SCON,#50H
; Control word for serial communication to
to select serial mode1
SETB TR1
; Start timer1
MOV A,#06h
MOV SBUF,A
; Transfer the byte to be transmitted to serial
Buffer register.
LOOP:
JNB TI, LOOP
; checking the status of Transmit interrupt
flag
CLR TI
HERE:
SJMP HERE
ISSUE: 01 REVISION: 00
73
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
Receiver:
MOV TMOD,#20H
MOV TL1,#FDH
MOV TH1,#FFH
MOV SCON,#50H
SETB TR1
LOOP:
JNB RI,LOOP
MOV A,SBUF
MOV DPTR,#4500H
MOVX @DPTR,A
CLR RI
HERE:
SJMP HERE
RESULT:
ISSUE: 01 REVISION: 00
74
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
COMMUNICATION BETWEEN 8051 MICROCONTROLLER
KIT & PC
AIM:
To wirte the program for communication between microcontroller and computer
Apparatus required:
Micro controller kit
SERIAL COMMUNICATION
8051>H
HELP MENU
Display data, program, internal, bit memory or registers
Edit data, program, internal, bit memory or registers
Single step from specified address, press SP to terminate
Execute the program till user break
Set address till where the program is to be executed
Clear break points
F10
Key followed by 4 key at the PC to upload data to a file (DOS)
Test the onboard peripherals
Download a file from PC mem to the SDA-SI-MEL kit (DOS)
Assembler
Disassembler
TEST FOR ONBOARD PERIPHERALS
For SDA SI-MEL kit, following menu is displayed on pressing the option "T"
8051>T
ALS-SDA SI-MEL Kit Test monitor
ISSUE: 01 REVISION: 00
75
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
1. Test internal Data RAM
2. Test external Data Memory (U6)
3. Test external Data memory (U7)
4. 8255 loop test
5. Test 8253
6. Exit
Select (1-6):
Suppose the user presses the key '1', following message is displayed if the internal data RAM is
OK.
Testing internal data RAM: Pass
After displaying the message, the menu is displayed once again waits for user to enter a key
EDITING MEMORY COMMAND:
8051>E
EDIT (R,B,M,P,D)D - EXTERNAL DATA RAM
Enter STA address = 0400
0400 =
7F:55 Press 'N' key to go to the next address
0401 =
D5:66
0402 =
D3:77
0403 =
73:88
0404 =
6F:12
0405 =
CB:01
0406 =
A7:02 Press 'P' key to go to the previous address
0407 =
6F:03
0408 =
7B:04
ISSUE: 01 REVISION: 00
76
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
0409 =
29:05
040A =
6F:06
040B =
73:07
040C =
FF:08
040D =
7D:09 Press 'CR' key to have the same address
040E =
09:90 Press 'ESC' Key to abort the command
III YEAR
8051>E
EDIT (R,B,M,P,D)B - BITS
Enter STA address = 00
00 = 0:1
01= 0:1
02 = 0:0
03 = 0:1
03 = 1:
03 = 1:
02 = 0:
8051>E
EDIT (R,B,M,P,D)R- REGISTERS
ACC = 00:33
PSW = 00:44
DPH = 00:55
DPL = 00:00
DPL = 00:00
8051>E
EDIT (R,B,M,P,D)-P = PROGRAM CODE
8000 = FF:78
8001 = FF:10
8002 = FF:79
ISSUE: 01 REVISION: 00
77
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
8003 = FF:20
8004 = FF:7A
8005 = FF: 12
8007 = FF : 00
8008 = FF : 03
8009 = FF : 0F
8051>E
EDIT (R,B,M,P,D)-M - INTERNAL RAM
0000 = 00 : 12
0001 = 00 : 34
0002 = 00 : 00
DISPLAY COMMAND
8051>D
EDIT (R,B,M,P,D)-EXTERNAL DATA RAM
Enter STA address = 0400
Enter END address = 040F
0500 55 66 77 88 12 01 02 03 04 05 06 07 08 09 04 D7
SETTING BREAK COMMAND :
8051>B
BR _ NO: R
BR_ADD 0000
ISSUE: 01 REVISION: 00
78
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
ERROR! ONLY A BREAKS ALLOWED
8051>B
BR _ NO: 0
ERROR! BREAK NUMBERS MUST BE BETWEEN 1 & 8
CLEAR BREAK COMMAND:
8051>C
BR_N0:A
Clears all the break point set by the user
8051>C
BR_N0:1
Clears the break point number 1
PROGRAMME EXECUTION COMMAND:
8051>G
PROGRAM EXECUTION
ENTER START ADDRESS = 8000
ACC PSW DPH DPL PCH PCL SP B R0 R1 R2 R3 R3 R4 R5 R6 R7
33 44 55 00 10 34 00 00 00 00 00 00
ASSEMBLE MEMORY COMMAND
8051>A
ENTER START ADDRESS = 8000
DISASSEMBLE MEMORY COMMAND
8051>Z
ISSUE: 01 REVISION: 00
79
MICROPROCESSOR AND MICROCONTROLLER LAB MANUAL
SRINIVASAN ENGINEERING COLLEGE, PERAMBALUR
III YEAR
RESULT:
VIVA QUESTIONS:
1.What is an Interrupt?
Interrupt is a signal send by an external device to the processor so as to request the processor to
perform a particular task or work
2.. What is program counter? How is it useful in program execution?
The program counter keeps track of program execution. To execute a program the starting address of
the program is loaded in program counter. The PC sends out an address to fetch a byte of instruction
from memory and increments its content automatically.
3. Define stack
Stack is a sequence of RAM memory locations defined by the programmer.
ISSUE: 01 REVISION: 00
80
Anda mungkin juga menyukai
- QUIZ02Dokumen1 halamanQUIZ02AbdallahAAbdallah0% (1)
- The 8051 Microcontroler Based Embedded SystemsDokumen43 halamanThe 8051 Microcontroler Based Embedded Systemsmanishpatel_790% (1)
- 8051-CH6-ArithLigic InstructnsDokumen114 halaman8051-CH6-ArithLigic Instructnsshivaspy100% (1)
- Seven Segment Led Display Interface - FinalDokumen6 halamanSeven Segment Led Display Interface - FinalVivek Jhunjhunwala100% (1)
- Part III 8051 General PgmsDokumen7 halamanPart III 8051 General PgmsHEMABelum ada peringkat
- Vtu Microcontroller Lab Manual PDFDokumen38 halamanVtu Microcontroller Lab Manual PDFQuentin Guerra100% (1)
- Solution - Manual The 8051 Microcontroller Based Embedded SystemsDokumen14 halamanSolution - Manual The 8051 Microcontroller Based Embedded Systemsmanishpatel_79Belum ada peringkat
- VHDL - 1100 Sequence Detector - Electrical Engineering Stack ExchangeDokumen3 halamanVHDL - 1100 Sequence Detector - Electrical Engineering Stack ExchangeMaddy TrichyBelum ada peringkat
- MF 3854 WDDokumen96 halamanMF 3854 WDRizwanAli100% (1)
- Presentation On FacebookDokumen39 halamanPresentation On FacebookShaswat SinghBelum ada peringkat
- 8051 Unit 1 NotesDokumen19 halaman8051 Unit 1 NotesSOMESH B S100% (13)
- 15ec563 - 8051 Microcontroller - Syllabus PDFDokumen2 halaman15ec563 - 8051 Microcontroller - Syllabus PDFNagesh100% (1)
- BCD To Hex ConversionDokumen10 halamanBCD To Hex Conversionnirmal_inboxBelum ada peringkat
- JNTU 4-1 Microcontroller & Applications Old Question PapersDokumen4 halamanJNTU 4-1 Microcontroller & Applications Old Question Papersmukesh_sonu100% (1)
- 8051 Lab Experiments With SolutionDokumen11 halaman8051 Lab Experiments With SolutionInaamahmed13Belum ada peringkat
- 8051 Manual FinDokumen39 halaman8051 Manual Finnagaraj100% (2)
- Interfacing Stepper Motor With 8051Dokumen15 halamanInterfacing Stepper Motor With 8051Pantech ProLabs India Pvt Ltd100% (2)
- Password Based Door Lock System Using 8051 MicrocontrollerDokumen36 halamanPassword Based Door Lock System Using 8051 MicrocontrollerKaos Polos Nakira33% (3)
- 8051 Manual - SS BMSCEDokumen45 halaman8051 Manual - SS BMSCEAnonymous ukZiTkKY8C100% (1)
- Assembly Language ProgramsDokumen33 halamanAssembly Language ProgramsPiyush chaudhariBelum ada peringkat
- The 8051 Mcq'sDokumen7 halamanThe 8051 Mcq'sAnsh Vashist75% (4)
- 8051 Microcontroller NotesDokumen40 halaman8051 Microcontroller Notesilg1100% (1)
- PIC Microcontrollers: Chapter 7: Addressing Modes, Bank Switching, Table ProcessingDokumen42 halamanPIC Microcontrollers: Chapter 7: Addressing Modes, Bank Switching, Table ProcessingBernard Maacaron100% (1)
- Final C++ ManualDokumen36 halamanFinal C++ ManualHarish G CBelum ada peringkat
- AC Lab Manual R22Dokumen92 halamanAC Lab Manual R22vijayabhargavi.sapuri2011100% (1)
- MC 10ESL47 Lab ManualDokumen87 halamanMC 10ESL47 Lab ManualAmbika NarayanBelum ada peringkat
- Review QuestionsDokumen7 halamanReview QuestionsSyakila100% (1)
- 8085 Instruction SetDokumen122 halaman8085 Instruction Setgokulchandru100% (1)
- Micro-Controller and Interfacing Exam PaperDokumen2 halamanMicro-Controller and Interfacing Exam PaperFenil ModiBelum ada peringkat
- 8051 Microcontroller QuestionsDokumen5 halaman8051 Microcontroller QuestionsHasan MahmoodBelum ada peringkat
- 1 Architecture of 8051 Microcontroller PDFDokumen18 halaman1 Architecture of 8051 Microcontroller PDFPavin Ka85% (68)
- M.tech Mid Question Paper CPLD & FpgaDokumen2 halamanM.tech Mid Question Paper CPLD & Fpgakanavath100% (3)
- Embedded Systems: Laboratory ManualDokumen32 halamanEmbedded Systems: Laboratory ManualSaman Fatima100% (1)
- 8051 Assignments Array Addition, Multiplication, Block TransferDokumen12 halaman8051 Assignments Array Addition, Multiplication, Block Transferakbari577650% (1)
- Microprocessor & Microcontroller Lab ManualDokumen61 halamanMicroprocessor & Microcontroller Lab Manualspgmaniarunagiri100% (3)
- DAC ADC Interfacing With 8051Dokumen37 halamanDAC ADC Interfacing With 8051Gowri100% (1)
- HDL Manual (18ecl58)Dokumen20 halamanHDL Manual (18ecl58)lohith sBelum ada peringkat
- MP Manual ProgramsDokumen226 halamanMP Manual Programssriramachandran201150% (2)
- Vlsi - Objective-Questions PDFDokumen9 halamanVlsi - Objective-Questions PDFvmspraneethBelum ada peringkat
- Programming Examples - I: Chapter - 7Dokumen34 halamanProgramming Examples - I: Chapter - 7vatsalshah24Belum ada peringkat
- 8051 ProgramsDokumen2 halaman8051 ProgramsvipulkondekarBelum ada peringkat
- Microprocessor 8085 Lab Manual PDFDokumen29 halamanMicroprocessor 8085 Lab Manual PDFvp_choudhary33% (3)
- 8051 Microcontroller ArchitectureDokumen3 halaman8051 Microcontroller Architecturenirmal_inboxBelum ada peringkat
- 18CS44 MODULE1 Chapter2Dokumen38 halaman18CS44 MODULE1 Chapter2Jim MoriartyBelum ada peringkat
- Module-6 Thumb Instruction SetDokumen54 halamanModule-6 Thumb Instruction Setsai Karthik100% (1)
- LPC2148 DacDokumen14 halamanLPC2148 DacSmruti Pore100% (1)
- ALP - Temperature Control System Using 8086Dokumen8 halamanALP - Temperature Control System Using 8086Anonymous uspYoqE100% (1)
- Microprocessor FileDokumen93 halamanMicroprocessor FileHarshal AmbatkarBelum ada peringkat
- Digital Ic TesterDokumen28 halamanDigital Ic TesterChris ManojBelum ada peringkat
- UNIT V Microcontroller I - MCQsDokumen10 halamanUNIT V Microcontroller I - MCQsPadmaja Venkataraman100% (2)
- Unit 9 - Week 7: Assignment 7Dokumen5 halamanUnit 9 - Week 7: Assignment 7Gajalakshmi AshokBelum ada peringkat
- 8051Dokumen72 halaman8051Arjun Aj100% (1)
- 8051Dokumen37 halaman8051bharathivenkat25Belum ada peringkat
- 8051 Instruction SetDokumen79 halaman8051 Instruction Setgsathishbsa100% (1)
- Opcode Sheet For 8085 Microprocessor With DescriptionDokumen3 halamanOpcode Sheet For 8085 Microprocessor With DescriptionVinoth Kumar J100% (1)
- 7 Segment Display Interfacing With 8051 MicrocontrollerDokumen3 halaman7 Segment Display Interfacing With 8051 MicrocontrollerPratheesh PrathiBelum ada peringkat
- HDL Lab Manual For VTUDokumen93 halamanHDL Lab Manual For VTULavanya Vaishnavi D.A.Belum ada peringkat
- 14EE490 - MC Lab Manual 2019 PDFDokumen57 halaman14EE490 - MC Lab Manual 2019 PDFkavithaBelum ada peringkat
- Instruction Set of 8085 Microprocessor By, Er. Swapnil V. KawareDokumen107 halamanInstruction Set of 8085 Microprocessor By, Er. Swapnil V. Kawareswapnil100% (1)
- MP ManualDokumen80 halamanMP ManualCharith R RameshBelum ada peringkat
- 2152006Dokumen3 halaman2152006Mohamed Ismail FiazBelum ada peringkat
- MicroprocessorDokumen2 halamanMicroprocessorriyazmothiBelum ada peringkat
- Microprocessor LabmanualDokumen38 halamanMicroprocessor Labmanualna_hariprsad100% (1)
- Question Papper Code: 11332: B.E./B.Tech. Degree Examination, May/June 2012 Fifth SemesterDokumen3 halamanQuestion Papper Code: 11332: B.E./B.Tech. Degree Examination, May/June 2012 Fifth SemesterMaddy TrichyBelum ada peringkat
- FIR Filters and Convolution ExampleDokumen2 halamanFIR Filters and Convolution ExampleMaddy TrichyBelum ada peringkat
- 8.1 Mux 2Dokumen4 halaman8.1 Mux 2Maddy TrichyBelum ada peringkat
- The Organization & Structure of Banks & Their IndustryDokumen19 halamanThe Organization & Structure of Banks & Their Industryrachim04Belum ada peringkat
- Wyche Bridge 2000Dokumen12 halamanWyche Bridge 2000BhushanRajBelum ada peringkat
- Antony Kungu - Final Project AssignmentDokumen11 halamanAntony Kungu - Final Project Assignmentapi-420816837Belum ada peringkat
- C D C SDokumen4 halamanC D C SandriBelum ada peringkat
- Reckitt Benkiser (Case Study) For SCMDokumen13 halamanReckitt Benkiser (Case Study) For SCMDiptiman GuhaBelum ada peringkat
- MIL-W-22759 Rev E - Part34Dokumen1 halamanMIL-W-22759 Rev E - Part34David WongBelum ada peringkat
- L5 - Dipl in Computing International StudentsDokumen6 halamanL5 - Dipl in Computing International StudentscuriousEngineBelum ada peringkat
- Despiece Completo ThwaittesDokumen60 halamanDespiece Completo ThwaittesJuan Antonio Cano Diaz100% (1)
- RDokumen17 halamanRduongpndngBelum ada peringkat
- University of Colombo Faculty of Graduate Studies: PGDBM 504 - Strategic ManagementDokumen15 halamanUniversity of Colombo Faculty of Graduate Studies: PGDBM 504 - Strategic ManagementPrasanga WdzBelum ada peringkat
- PQ100 Data SheetDokumen2 halamanPQ100 Data Sheethanif_perdanaBelum ada peringkat
- Manual Bombas Pozo e ImpulsionDokumen112 halamanManual Bombas Pozo e ImpulsionFernando PuentesBelum ada peringkat
- Catalogue SocorexDokumen40 halamanCatalogue Socorexdomitian88100% (1)
- Fuses & Circuit Breakers PDFDokumen13 halamanFuses & Circuit Breakers PDFCarlos Luis Santos SomcarBelum ada peringkat
- Ds Lm5006 en Co 79839 Float Level SwitchDokumen7 halamanDs Lm5006 en Co 79839 Float Level SwitchRiski AdiBelum ada peringkat
- Samtec ASP 134488 01 DatasheetDokumen4 halamanSamtec ASP 134488 01 DatasheetamiteshtripathiBelum ada peringkat
- Ijmemr V3i1 009Dokumen5 halamanIjmemr V3i1 009Sandesh SanBelum ada peringkat
- BDM DriverDokumen16 halamanBDM DrivervolvodiagBelum ada peringkat
- BMC ProactiveNetDokumen202 halamanBMC ProactiveNetfranc_estorsBelum ada peringkat
- Mitac 6120N ManualDokumen141 halamanMitac 6120N ManualLiviu LiviuBelum ada peringkat
- Relais Bistable, 3 RT / 25 A: Relay Latch, 3 PDT / 25 AmpDokumen4 halamanRelais Bistable, 3 RT / 25 A: Relay Latch, 3 PDT / 25 AmpXavier DevauxBelum ada peringkat
- Open XPS Support in Windows 8: WhitePaperDokumen24 halamanOpen XPS Support in Windows 8: WhitePaperDeepak Gupta (DG)Belum ada peringkat
- Differences Between Huawei ATCA-Based and CPCI-Based SoftSwitches ISSUE2.0Dokumen46 halamanDifferences Between Huawei ATCA-Based and CPCI-Based SoftSwitches ISSUE2.0Syed Tassadaq100% (3)
- Arc Welding ProcessesDokumen153 halamanArc Welding Processespratap biswasBelum ada peringkat
- Graphics in C LanguageDokumen8 halamanGraphics in C LanguagePattabhi RamaraoBelum ada peringkat
- Data0305 KX18DCDokumen3 halamanData0305 KX18DCAbdelhamid SammoudiBelum ada peringkat
- SV50SP2RevB Released User DocumentsDokumen8 halamanSV50SP2RevB Released User DocumentsAhmed RamadanBelum ada peringkat
- YAMAHA Blaster (Parts) PDFDokumen65 halamanYAMAHA Blaster (Parts) PDFAlberto VegaBelum ada peringkat