Anda mungkin juga menyukai
- Doa Nabi IbrahimDokumen1 halamanDoa Nabi IbrahimAde Ilham FajriBelum ada peringkat
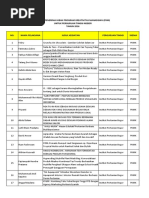
- Lampiran Penerima Hibah PKM - PTN - 2016Dokumen232 halamanLampiran Penerima Hibah PKM - PTN - 2016Michael HarveyBelum ada peringkat
- Lapen01 T1 A06 5112100080 5112100097Dokumen12 halamanLapen01 T1 A06 5112100080 5112100097Ade Ilham FajriBelum ada peringkat
- Tutorial Pemrograman Berorientasi ObjekDokumen12 halamanTutorial Pemrograman Berorientasi ObjekAde Ilham FajriBelum ada peringkat
- Pengumuman Pemenang - Pengadaan Server Cloud SystemDokumen1 halamanPengumuman Pemenang - Pengadaan Server Cloud SystemAde Ilham FajriBelum ada peringkat
- BackUp Super LoginDokumen14 halamanBackUp Super LoginAde Ilham FajriBelum ada peringkat
- Tutorial PBO - Pointer - Array - FunctionDokumen10 halamanTutorial PBO - Pointer - Array - FunctionAde Ilham FajriBelum ada peringkat
- Soal DasProgDokumen7 halamanSoal DasProgAde Ilham FajriBelum ada peringkat
- Bahan SuperLogin #1 KMIDokumen19 halamanBahan SuperLogin #1 KMIAde Ilham FajriBelum ada peringkat
- Kumpulan Soal Dan Pembahasan ASMDokumen9 halamanKumpulan Soal Dan Pembahasan ASMAde Ilham FajriBelum ada peringkat
- Kumpulan Soal Dan Pembahasan Register, Counter, MemoryDokumen16 halamanKumpulan Soal Dan Pembahasan Register, Counter, MemoryAde Ilham Fajri33% (3)
- PRIMAL'S ALGORITHMDokumen10 halamanPRIMAL'S ALGORITHMAde Ilham FajriBelum ada peringkat
- Kuliah - 17 - Hazard Pada Rangkaian SekuensialDokumen18 halamanKuliah - 17 - Hazard Pada Rangkaian SekuensialAde Ilham FajriBelum ada peringkat
- Metode TabulasiDokumen11 halamanMetode TabulasiAde Ilham FajriBelum ada peringkat
- Sistem Digital - Penyederhanaan Fungsi BooleanDokumen27 halamanSistem Digital - Penyederhanaan Fungsi BooleanAde Ilham FajriBelum ada peringkat
- Panduan Microsoft Office Word 2007Dokumen26 halamanPanduan Microsoft Office Word 2007banta sandra100% (15)