Anda mungkin juga menyukai
- Unidad 5 MecanismosssssssssssssssssDokumen20 halamanUnidad 5 MecanismosssssssssssssssssPato Kaceres83% (12)
- 5 Introduccion A La Sintesis de MecanismosDokumen4 halaman5 Introduccion A La Sintesis de MecanismosKaarenyEdgar Mtz100% (2)
- ITV2014 - Espaciamiento de Los Puntos de Precision 52 PDFDokumen7 halamanITV2014 - Espaciamiento de Los Puntos de Precision 52 PDFLalo CF50% (2)
- 2.5 Análisis de Velocidad y Aceleración de Mecanismos IntermitentesDokumen3 halaman2.5 Análisis de Velocidad y Aceleración de Mecanismos IntermitentesJoel HGBelum ada peringkat
- Síntesis analítica de mecanismos de 4 barrasDokumen2 halamanSíntesis analítica de mecanismos de 4 barrasDavid Bustamante75% (4)
- Importancia y Aplicación Del Análisis de MecanismosDokumen16 halamanImportancia y Aplicación Del Análisis de MecanismosAnderson Torres50% (2)
- Unidad 3 LevasDokumen7 halamanUnidad 3 LevasEel Fläqqo Gonzalini'0% (1)
- Sintesis de MecanismosDokumen112 halamanSintesis de MecanismosSra R Gil0% (5)
- t13 Introduccion A La Sintesis de MecanismosDokumen6 halamant13 Introduccion A La Sintesis de MecanismosDaniel Santos CortezBelum ada peringkat
- Teorema de KennedyDokumen6 halamanTeorema de KennedyBereniceBelum ada peringkat
- t15 Sintesis Analitica de Mecanismo de 4 BarrasDokumen6 halamant15 Sintesis Analitica de Mecanismo de 4 BarrasDaniel Santos Cortez100% (1)
- Unidad 5Dokumen17 halamanUnidad 5Leeo Guerrero95% (43)
- Generalidades de MecanismosDokumen2 halamanGeneralidades de Mecanismosjuliofdez100% (4)
- Mecanismo 4 barras como generador funcionesDokumen10 halamanMecanismo 4 barras como generador funcionesHaviid SibajaaBelum ada peringkat
- Generalidades de Los MecanismosDokumen5 halamanGeneralidades de Los MecanismosRaymundo Gracia Reyna67% (3)
- Levas y seguidores en máquinasDokumen18 halamanLevas y seguidores en máquinasMaritza Guadalupe100% (1)
- 2.3 Método de La Energía para Sistemas Sin Amortiguamiento: Michel Luis Ramon Ingeniería MecatrónicaDokumen3 halaman2.3 Método de La Energía para Sistemas Sin Amortiguamiento: Michel Luis Ramon Ingeniería Mecatrónicakamo flazhBelum ada peringkat
- T15 Sintesis Analitica de Mecanismos de 4 BarrasDokumen4 halamanT15 Sintesis Analitica de Mecanismos de 4 BarrasAlan GonzalezBelum ada peringkat
- Estandarizacion EngranajesDokumen4 halamanEstandarizacion EngranajesArmandoBelum ada peringkat
- Síntesis de mecanismos de cuatro barras como generadores de funciones y movimientosDokumen16 halamanSíntesis de mecanismos de cuatro barras como generadores de funciones y movimientosjuliogomez0080% (1)
- Nomenclatura, Clasificación y Arreglos Comunes de Los Mecanismos de Leva y SeguidorDokumen11 halamanNomenclatura, Clasificación y Arreglos Comunes de Los Mecanismos de Leva y SeguidorEduardo Romo100% (1)
- Analisis de Posicion de Mecanismos Articulados Mediante Ecuaciones de CierreDokumen46 halamanAnalisis de Posicion de Mecanismos Articulados Mediante Ecuaciones de CierreJ Antonio Hernandez Azuara100% (4)
- Diseño de levas con softwareDokumen5 halamanDiseño de levas con softwarequinojarg100% (1)
- 2.3 Análisis de Aceleración de Mecanismos Planos Por Método Gráfico y Analítico.Dokumen13 halaman2.3 Análisis de Aceleración de Mecanismos Planos Por Método Gráfico y Analítico.Maritza Guadalupe50% (2)
- Sistemas tubería flujo compresibleDokumen8 halamanSistemas tubería flujo compresibleAlex100% (1)
- Diseño de sujetadores para máquinas: Nomenclatura, fuerzas y parámetros en tornillos y soldaduraDokumen23 halamanDiseño de sujetadores para máquinas: Nomenclatura, fuerzas y parámetros en tornillos y soldaduraJosé Ramón PlumaBelum ada peringkat
- t14 Sintesis Analitica de MecanismosDokumen5 halamant14 Sintesis Analitica de MecanismosDaniel Santos CortezBelum ada peringkat
- 4.3 Analisis Analitico y Grafico de Levas PlanasDokumen6 halaman4.3 Analisis Analitico y Grafico de Levas Planasalexander velazcoBelum ada peringkat
- 3.4 Diseño de Levas Planas Con La Aplicación de SoftwareDokumen29 halaman3.4 Diseño de Levas Planas Con La Aplicación de SoftwareJuan Pablo Galvan Camacho100% (1)
- 2.4 Masa EfectivaDokumen23 halaman2.4 Masa EfectivaRaul Zambrano0% (1)
- Rotor Rígido, Rotor Flexible Sus ToleranciasDokumen3 halamanRotor Rígido, Rotor Flexible Sus ToleranciasWilbert Cabrera100% (1)
- Terminoliogía, Clasificación y Aplicación de Los EngranesDokumen13 halamanTerminoliogía, Clasificación y Aplicación de Los EngranesEduardo Michel Lopez100% (1)
- Ciclo, Periodo y Fase de MovimientoDokumen6 halamanCiclo, Periodo y Fase de MovimientoAlexander Vega AvalosBelum ada peringkat
- Cinemática de La VibraciónDokumen18 halamanCinemática de La VibraciónJoshua RomeroBelum ada peringkat
- Análisis y Síntesis de MecanismosDokumen10 halamanAnálisis y Síntesis de MecanismosDaniel Eduardo Jrz100% (2)
- 1.1 Grados de LibertadDokumen4 halaman1.1 Grados de LibertadLuis Ramon Ramon CanelaBelum ada peringkat
- Nomenclatura, Clasificación y Aplicación de Levas y SeguidoresDokumen5 halamanNomenclatura, Clasificación y Aplicación de Levas y SeguidoresLuna Iziary100% (3)
- t12 Diferenciales y TransmisionesDokumen5 halamant12 Diferenciales y TransmisionesDaniel Santos CortezBelum ada peringkat
- Introducción A La Síntesis de MecanismoDokumen6 halamanIntroducción A La Síntesis de MecanismourbalBelum ada peringkat
- VM - Unidad I. Cinematica de VibracionesDokumen5 halamanVM - Unidad I. Cinematica de VibracionesIvan Zamora100% (1)
- Estandarización y Normalización de Engranes.-1Dokumen29 halamanEstandarización y Normalización de Engranes.-1Jaudiel Carreras60% (5)
- Vibraciones Mecanicas U2Dokumen12 halamanVibraciones Mecanicas U2Angel Avalos0% (1)
- 5.7 MecanismosDokumen15 halaman5.7 MecanismosLuisdeGanteBelum ada peringkat
- Diagrama de DesplazamientoDokumen11 halamanDiagrama de DesplazamientoIvan Zamora100% (2)
- 4 Unidad MecanismosDokumen21 halaman4 Unidad MecanismosAmairani Basulto100% (3)
- Principios Fundamentales: Análisis y Síntesis de MecanismosDokumen15 halamanPrincipios Fundamentales: Análisis y Síntesis de MecanismosTersy Comi Gonzalez100% (2)
- Introducción a la síntesis de mecanismosDokumen6 halamanIntroducción a la síntesis de mecanismosAlfonsoBelum ada peringkat
- Diagramas de Desplazamiento de Una Leva Tipo Rotacional o de DiscoDokumen6 halamanDiagramas de Desplazamiento de Una Leva Tipo Rotacional o de DiscoDavid RiedelBelum ada peringkat
- Software Utilizados para El Análisis de MecanismosDokumen5 halamanSoftware Utilizados para El Análisis de MecanismosFabiana Quintero100% (2)
- Aplicación de Las Leyes de Newton Al Movimiento de Un Sistema de Partículas. Fuerzas Inerciales o EfectivasDokumen4 halamanAplicación de Las Leyes de Newton Al Movimiento de Un Sistema de Partículas. Fuerzas Inerciales o Efectivaselkmaleon60% (5)
- 1.4 Teoria de FallasDokumen6 halaman1.4 Teoria de FallasHermilo López MendozaBelum ada peringkat
- Diseño de SujetadoresDokumen37 halamanDiseño de SujetadoresFede Ramirez50% (2)
- Nomenclatura y Clasificacion de EngranesDokumen8 halamanNomenclatura y Clasificacion de EngranesRicardo Camacho40% (5)
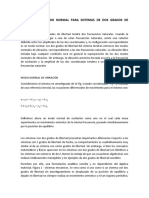
- Vibración de Modo Normal para Sistemas de Dos Grados de Libertad.Dokumen2 halamanVibración de Modo Normal para Sistemas de Dos Grados de Libertad.Wilbert CabreraBelum ada peringkat
- Inversion de Mecanismo 4 BarrasDokumen2 halamanInversion de Mecanismo 4 BarrasElieser CastilloBelum ada peringkat
- Clase Mecanismos de 4 Barras_1Dokumen24 halamanClase Mecanismos de 4 Barras_1pipe spBelum ada peringkat
- Mecanismos de Retorno RapidoDokumen29 halamanMecanismos de Retorno RapidoIsabela Agamez SarmientoBelum ada peringkat
- Conceptos básicos de mecanismos y diagramas cinemáticosDokumen56 halamanConceptos básicos de mecanismos y diagramas cinemáticosAnderson RamirezBelum ada peringkat
- Teoria de MecanismosDokumen56 halamanTeoria de Mecanismosesteban4villagra-1Belum ada peringkat
- Mecanismos de Retorno RapidoDokumen30 halamanMecanismos de Retorno RapidoLucy Varas Rojas100% (5)
- Tipos de VálvulasDokumen3 halamanTipos de VálvulasJose Eduardo Sandoval ValenzuelaBelum ada peringkat
- Matriz RaciDokumen2 halamanMatriz RaciJose Eduardo Sandoval ValenzuelaBelum ada peringkat
- Presentacione ProyectoDokumen17 halamanPresentacione ProyectoJose Eduardo Sandoval ValenzuelaBelum ada peringkat
- Reporte Del Funcionamiento Del RefrigeradorDokumen6 halamanReporte Del Funcionamiento Del RefrigeradorJose Eduardo Sandoval ValenzuelaBelum ada peringkat
- Resume NDokumen1 halamanResume NJose Eduardo Sandoval ValenzuelaBelum ada peringkat
- Unidad 4 EngranesDokumen72 halamanUnidad 4 EngranesJose Eduardo Sandoval ValenzuelaBelum ada peringkat
- Ar Cientific oDokumen8 halamanAr Cientific oJose Eduardo Sandoval ValenzuelaBelum ada peringkat
- Leva Excéntrica ExposicionDokumen11 halamanLeva Excéntrica ExposicionJose Eduardo Sandoval ValenzuelaBelum ada peringkat
- Leva Excéntrica ExposicionDokumen11 halamanLeva Excéntrica ExposicionJose Eduardo Sandoval ValenzuelaBelum ada peringkat
- Lista de VerificaciónDokumen2 halamanLista de VerificaciónJose Eduardo Sandoval ValenzuelaBelum ada peringkat
- Características Del EnsayoDokumen10 halamanCaracterísticas Del EnsayoJose Eduardo Sandoval ValenzuelaBelum ada peringkat
- Balanceo EstaticoDokumen10 halamanBalanceo EstaticoJose Eduardo Sandoval ValenzuelaBelum ada peringkat
- Sensores de Proximidad o de PresenciaDokumen9 halamanSensores de Proximidad o de PresenciaJose Eduardo Sandoval ValenzuelaBelum ada peringkat
- MAPADokumen2 halamanMAPAJose Eduardo Sandoval ValenzuelaBelum ada peringkat
- Resume NDokumen13 halamanResume NJose Eduardo Sandoval ValenzuelaBelum ada peringkat
- Motores de C ADokumen14 halamanMotores de C AJose Eduardo Sandoval ValenzuelaBelum ada peringkat
- OCW Rugosidades Sup PDFDokumen20 halamanOCW Rugosidades Sup PDFjenny castro villcaBelum ada peringkat
- El Poder de Una VisionDokumen1 halamanEl Poder de Una VisionJose Eduardo Sandoval ValenzuelaBelum ada peringkat
- OBJETIVOS ExpocisionDokumen13 halamanOBJETIVOS ExpocisionJose Eduardo Sandoval ValenzuelaBelum ada peringkat
- Recocido metales 40Dokumen14 halamanRecocido metales 40Jose Eduardo Sandoval ValenzuelaBelum ada peringkat
- FG O IMEC-2010 - 228 Ingenieria de Materiales MetalicosDokumen10 halamanFG O IMEC-2010 - 228 Ingenieria de Materiales MetalicosmanoooloooooBelum ada peringkat
- Energía eólica: una opción para el futuroDokumen19 halamanEnergía eólica: una opción para el futuroJose Eduardo Sandoval ValenzuelaBelum ada peringkat
- Ingenieria MecanicaDokumen7 halamanIngenieria MecanicaJose Eduardo Sandoval ValenzuelaBelum ada peringkat
- Energía en EvoluciónDokumen82 halamanEnergía en EvoluciónCayetano SperanzaBelum ada peringkat
- TRAMITES U Hasta Dip AcDokumen12 halamanTRAMITES U Hasta Dip AcDavinia Claros FernandezBelum ada peringkat
- Plan Auditoria Interna Iso9001Dokumen3 halamanPlan Auditoria Interna Iso9001Lenor ChileBelum ada peringkat
- IEEE1058 PlanDokumen2 halamanIEEE1058 PlanChristianBelum ada peringkat
- Tecnologías ayuda TEADokumen173 halamanTecnologías ayuda TEAJuan C Ramirez FloresBelum ada peringkat
- Manual Educacion FinancieraDokumen116 halamanManual Educacion FinancieraMarcos Besteiro López100% (16)
- 07 Liahona Julio 1983Dokumen145 halaman07 Liahona Julio 1983Tere SirenaBelum ada peringkat
- D04-001 - MC Conductores BarrajesDokumen22 halamanD04-001 - MC Conductores BarrajesDanilo Poma MuñozBelum ada peringkat
- Ficha de Actividades #05 Eda 02 Tercero de Secundaria 2023Dokumen3 halamanFicha de Actividades #05 Eda 02 Tercero de Secundaria 2023Francis SilvaBelum ada peringkat
- PST Mantencion Mecanica PED-MADokumen13 halamanPST Mantencion Mecanica PED-MAErika Orellana MirandaBelum ada peringkat
- Manual Journey 2012 PDFDokumen453 halamanManual Journey 2012 PDFferisalva00Belum ada peringkat
- Perfilado Sin Aporte de Material El IngenioDokumen7 halamanPerfilado Sin Aporte de Material El IngeniogcantaBelum ada peringkat
- EstadisticaDokumen4 halamanEstadisticaJorge Loyola BravoBelum ada peringkat
- Ensayo 1 - MatemáticaDokumen31 halamanEnsayo 1 - MatemáticaGeral JaraBelum ada peringkat
- Sesion de Aprendizaje N°32 - El Tema y Los Subtemas-R.vDokumen2 halamanSesion de Aprendizaje N°32 - El Tema y Los Subtemas-R.vJensRodriguezChBelum ada peringkat
- INTE00015 T3 InfografíaDokumen1 halamanINTE00015 T3 InfografíaCarolina ChavarriaBelum ada peringkat
- Cige ProverificaDokumen5 halamanCige ProverificaDiego PicazoBelum ada peringkat
- Inmovilización A Motos Se Les Acabó La Mina de o 2Dokumen1 halamanInmovilización A Motos Se Les Acabó La Mina de o 2candelaria693Belum ada peringkat
- Solucionario Ejercicios Propuestos S02 - s1Dokumen8 halamanSolucionario Ejercicios Propuestos S02 - s1Ale Minato ObandoBelum ada peringkat
- Nuevas Dimensiones de La SeguridadDokumen28 halamanNuevas Dimensiones de La Seguridadjosselizque100% (1)
- FisicaDokumen10 halamanFisicaElmer Escobar RomeroBelum ada peringkat
- Óptica en El Arcoíris .Dokumen14 halamanÓptica en El Arcoíris .Maria Camila AmadoBelum ada peringkat
- ScrumDokumen33 halamanScrumYbme67Belum ada peringkat
- Modelo de Un Diagnostico de Sus Nudos CriticosDokumen2 halamanModelo de Un Diagnostico de Sus Nudos CriticosAngelica Maria RodriguezBelum ada peringkat
- Microbiologia. Ecosistema MicrobianoDokumen92 halamanMicrobiologia. Ecosistema MicrobianoRafaela BugniBelum ada peringkat
- Cartilla Retención en La FuenteDokumen14 halamanCartilla Retención en La Fuentemsyunfo0% (1)
- Casaliglia Prueba 4Dokumen3 halamanCasaliglia Prueba 4AlexGonzalezBelum ada peringkat
- TCO02 TareaDokumen4 halamanTCO02 TareaAlmudena Gonzalez PeinadoBelum ada peringkat
- Exaltacion Caida y Dignidades PlanetariasDokumen10 halamanExaltacion Caida y Dignidades PlanetariasMilthon PerezBelum ada peringkat
- Dolor Toracico Generalidades EditadoDokumen10 halamanDolor Toracico Generalidades EditadojuanfdotrujilloBelum ada peringkat