Kekuatan
Diunggah oleh
leo0 penilaian0% menganggap dokumen ini bermanfaat (0 suara)
17 tayangan9 halamankekuatan kapal
Judul Asli
kekuatan
Hak Cipta
© © All Rights Reserved
Format Tersedia
PDF atau baca online dari Scribd
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen Inikekuatan kapal
Hak Cipta:
© All Rights Reserved
Format Tersedia
Unduh sebagai PDF atau baca online dari Scribd
0 penilaian0% menganggap dokumen ini bermanfaat (0 suara)
17 tayangan9 halamanKekuatan
Diunggah oleh
leokekuatan kapal
Hak Cipta:
© All Rights Reserved
Format Tersedia
Unduh sebagai PDF atau baca online dari Scribd
Anda di halaman 1dari 9
Chapter 1
LONGITUDINAL STRENGTH
4, Bending Moments, Shearing Forces,
‘Stresses, and Strains
‘The safe dimensions of any strength member may ho determined
if the designer knows:
AY the Joads it has to support;
(2) the actual stresses and deflections due to the loads i1aposed
(they ore doterminod by applying a certain method of stress anal-
ysis); an
(8) the values of allowable stresses and deflections.
By Nirlue of progross in naval architecture, the Joads acting
ona ship in a seaway may be ascertained with a faitly good degree
of accuracy. When they are known, there is practically no diffi.
culty in estimating the actual stressos.
Tho ever stringont requirements of speed and scaworthiness
that modern ships sre to moot ronder it nevessury 10, develop
4 method of doterminiag the dynamic loads coming on tho struc,
uro under certain sorvico conditions, Also. tho widespread nso
of welding in place of riveting calls for a moro comprehensive
evaluation of the various actions a ship has to resist, especially
fom the standpoint of local stross concentrations in limited areas
of welded hull
ship afloat, both in still water and among wavos, is subject
fo a bending action and may bo likened, as pointed out in Lhe
foregoing, to a hollow girder of variable cross section. Tho corte.
sponding bending moments and sheering forces at ony eross section
may bo resolved, dopending on thoie origin and uode of uolion
with respect Lo time, into throv components which aro discussed
bolow.
(1) Still water bonding moments and shearing forcos hrought
about by the particular conditions of loading and support. While
the former correspond to the distribution of the weight of all
particles in tho mass of a ship throughout hor lungti, the Latter
dopond on the forces of wator pressure which act upwards (a bal-
ance tho abovo weight and sorve to eonstilwte, if sumaned, 11 dis.
placement tonnage. Unlike warships, in inorshant ships th> still
wator bonding samont may vary approciably and. roach, igh
values deponing os Ioading. ‘To reduce this component in tis
magnitude, careful ballasting is required WI
pas-age in light conditions. ‘The usual sola
bending moment component is My.»
@) Wave bonding moments and’ shearing (a
honk comes inio play mainly due to a distribulioy
of support throughout tho length of a ship differant |
sti
water.
A vessel traversing waves iz subjoc: to pitehingy #Olllng, ail
euving. In other words, her each ond is alternably MMM bid
falling, she inclines from side to side and has a hodill notion:
up and down. ‘The amplitude of tho throu modes of ostillatian ix
influenced mainly by such factors as ratio of ship-to-wavo length,
wave height, angle betwoen ship's course and direction of wave
advance, and ship's speed. All the factors being anything but
constant, the inertial forces of the hull and those ef the houndary
layer, as well as the forees of resistance to the movement of a ship
impose on the hull additional Joads. ‘These, one may believe,
add to the loads due to the forces of water pressure and weight.
Way back at tho close of the 19th century, Academician
A. N. Krylov, a well-known Russian naval architect, has dovel-
oped a general theory of oscillation of the ship and suggested
a method for solving the equations af m " which permite cal
culation of the bending moments due to additional loads. Further
studies, howover, have shown that the maxiinutn values of bond:
Ing moments caleulatod acevrding Wo Krylov do uot exceed Uso
obiained on the assumption that the ship is undor static eondi=
tions, i.c., disregarding her motion and oscillation. This is why.
aul the strength calculations nowadays atv hased on static eons!
dorations only. In other words, the waves aro considered to be
stationary. It will be recalled, that in a vessel moving head on
Unrough waves of her own length each of tho bending moinent
components will he a maximum the instance either a crest ot
a ivongh is amidships
Whe te ship is on a crest, the forees of support increasw ainid-
ships and docroaso at the encls, as comparod with tho still water
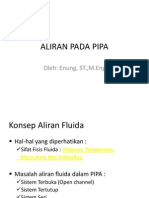
conditions, and the vessel is hogging (Fig. 7). When the ship is
ina trough, the forces of support inerease al the ends and decrease
amidships. The vessel is said to be in sagging conditions, In inast,
cases, the values of bending moments aud slicnting forces caleula:
cd ina ship which either hogs or sags are much in excess of those.
btainoil in still water.
Wave hending moment components are denoted by Mwave.
‘Tho inagnitudo and sign of a wave ending moinont compo rent
change daponding on tho porioi af pitehing, Which, in Lorn. is
equal to dhe apparent wave putiad, Since tho Tatbee is muely in
Chapter
LONGITUDINAL STRENGTH
SS
4, Bonding Momients, Shearing Fores,
Stresses, and Strains
‘The safe dimensions of any strength membor may ho determined
if the designer knows:
14 tho Toads it has to support;
(2) the actual stresses and deflections due to the loads ixaposed
(they are determined by applying a certain method of stréss anal-
ysis); and
(3) the values of allowable stresses and deflections.
By wirtue of progress in naval architecture, the loads acting
on a ship in a seaway may bo asvortained with a fairly good dogros
of accuracy. Whon thoy are known, there is practically no diliic
culty in estimating tho aotual stresses.
‘The evor stringent requirements of speed and scaworthiness
that modern ships are 10 moot ronder # uevessary to develop
a mothod of determining the dynamic loads coming on the strie,
Usro under cerlain sorviee conditions. Also tho widespread. Wo
of wolding in placo of rivetting calls for a moro comprehensive
evaluation of the various actions a ship has to resist, especially
{rom the standpoint of local stress concenteatfons in Limited area
of wolded hulls,
A ship afloat, both in still water and among waves, is subject
to a bending action and may be likened, as pointed out in the
foregoing, to a hollow gitder of variable cross section. Tho eorre
sponding bending moments and shearing forces at any cross section
bo resolved, depending on their origin and mode of action
With respoct to timo, into three components which aro discussed
below
(1) Still wator bending moments and sheasing forces brought
about by the particular conditions of loading and support, While
the former correspond to the distribution of the weight of all
particles in tho mass of a ship theoughout her longus, tho latter
fopend on tho forcas of water pressure which acl upwards to bal
ance tho ahovo wight and sorve to constitute, if sumanod, ty
placement tounage, Unlike warships, in merchant ships ths still
water bonding moment may vary approciably and ronch. high
values doponcing on Toading, To eoduco this component in tts
Lonatudial Sienth
Magnitude, careful ballesting is required whon some dl
pas-age in lighs conditions. ‘The usual notation of the still
bending momont component is M,.y
(@) Wavo bonding moments and Shoarins forces. ‘Pie 60 ups
tient comes into play mainly vue to a distailution of tio hn
of support throughout the Iungth of a ship different to thot if
water,
A vossel travorsing waves is subject, lo pitching, rolling, and
heaving. In other words, her each ond is alternately lifting aud
falling, she inclines froin side to side and has a badily mation
up and down. The amplitude of tho threw mades of essillavion is
influenced mainly by such factors as ratio of ship-to-wave length,
wave height, angle between ship's course and direction pf ‘wave
advance, and ship's speed. All the factors being anything but
constant, the inertial forces of the hull and those of the boundary
layer, as well as the forces of resistance to the movement of a ship
imposo on the hull additional loads. Those, one may believe,
ada to the loads due to the forcos of water pressure and we ght.
Way hack at the clese of the 49th century, Academician
A. N. Krylov, a well-known Russian naval architect, has dovel-
oped a general theory of oscillation of the ship and suggusted
a method for solving the equations of motion which pormite cal
culation of the bending moments due to additional loads. Further
studies, however, have shown that the maximnm values of bend.
ng moments caleulated according to Krylov do nol exceed Lo
obtained on the assumption that the ship is under static condi.
tions, i.c., disregarding her motion and oscillation. This is why
all the strength calculations nowadays are basod on static const
dorations only. In other words, the waves aro considered to be
stationary. It will be recalled, that in a vessel moving heal on
theough ‘waves of her own length each of the bending moinent
components will be a maximuin the instance eller a erest oF
4 Waugh is amidships.
Wiien the ship is oa a erest, the forces of support increas ainid-
ships and docrease at the ends, as compared with the still water
conditions, and the veseel is hogging (Fig. 7). When the ship is
ina trough, the forces of support inerease at the ends and decreas
‘idships. Who vossel is said to be in sagging conditions. In most
he values of bending moments and shenzing forces calcula
cd in'a ship which either hogs or sags are much in excess of Ukose
obtainod in still water.
Wave bending momen components aro denoted by Moun
‘Tho magnitude and sign of a wave bending moment compognk
change doponding on tho poriod of pilehinie, whieh, in MMPI, Bi
equal Wy the apparent wave period. Since the litter i Anneh UE
Gseillation period of the hull, the effect
ending moment component on the hull is assumed
o bo a statical, or, to be precise, a statically variable one Tie
moans that the wave hending moment component and the sili
water bending moment component may be treated as a single
Rholo, (as is usually the case. Their sum is referred to as tao
bending moment static component
Matos = Mew. + Mecase
While for a givon condition of loading Maw, is consiant,
Moore varies between the two maximums of opposite sign depend,
ing’on whether the ship is on the crest of a wavo or in'ihe touch
D
Fig. 7. Ship in rough seas:
|= on the crest of a wert; In the trough of « wave
SLomavave, som this, it appears reasonable that the bending
moment static component, as an algebraic sum of Mac ant
Macey will have two peak values denoted as Mvisi and Misi,
respectively.
3) Bonding moments and shearing forces intermittently aris:
ing duo to pounding, i.e., when the ship is coming down heavily
yt the bow upon waves while moving head on at high spood.
This bonding momont component is called the impact or dyramis
Component Man. While in general its inagnitunte is Iniuemad
by such fattors as ship's speed, draught, trim, speed-o-longth
ratio, and conditions of sea, it is the amplitude of heaving ead
Ditching, as well as tho ship's lines in tho fore ond, whotler {ull
or fine, that really snatter. AL resonance, thn amplitude of oseilla,
Hions is a maximum, and 80 is Myya.
Tn merchant shiys, whother latlen or in ballast, the impact
of pounding is most pronounced abaut the forward fifth of ti
ship's length, and those with full bows are especially susceytible
to its effects when making passages in ballast
Most masters, even those of high-speed vessels, ary very enutions
not to exceed the spoed beyond a minimum snfficient. to give
steorage way while head on in strong seales, for otherwise heavy
blows may oceur detrimental to the intogrity of ship strusture
and operation of machinery. As exporivtive goes to” show, no
inetease over this minimum more than hy 4.5 104.8 knots in bsllast
and 2 to 2.5 knots ladon can be practically achieved. IL is only
inv an emergency thal tho ship is permitted 10 speed in rough sock
in order to provent an accident.
‘The bending moment dynamic component run being about eithor
hogging ot sagging. By analogy with the static components. the
dynamic components are denoted as iMij%> and Mist, respoc-
tively.
The resultant bending moment acting at any cross section may
bo obtained from the relationship
M= Mio + Mae + Mayn= Men + Maya
Depending on whether the ship is on the crest of a wave or in
the trough of a wave, the above equation takes tho farm
Mew = Midi + Might!
and
Me. w= Maat’ + Mii
5, Principal Steps in Calculation
‘The intensity of acticns which bend the ship longitudinally
and have to be resisted by her structure is influenced by such
factors as the magnitude and distribution of the woights compris.
ing the displacement tonnage throughout the length. Also the
ship's length, draught, speed, conditions of sea at their worst,
and ship's lines are all-important in this respect.
Since in any particular ship the hending moments and shesring
forces may vary appreciably dopending on the magnitude of var
able weights and the way they are distributed throughout the
Jength, the actions the ship strueture has to resist should be deter.
mined Jor the most unfavourable conditions of toading. ‘These,
usually outlined in certain instructions, ure ay follows:
(a) ship with full cargo load and consumable stores aboard;
(b) ship with full cargo load and 10 por cent. of consumable
stores aboard;
(c) ship in ballast and with cousmuable stares aboard the
latter being distrifnted as badly as the ballasts
liable to produce stresses in To construct the weight curve, the hast: lino is divided into
conditions of loading i
5 of loading given in items (a) twenty equal parts, each corresponding to the frame spacing, [t is
‘excess of those lus to the condition:
r to 0) agsumed for simplicity that oach tndividval wight 15 uniformly
i Tho styles of loading most favourable as well as those which Gistributed between the neatest frame lines. Thus the ordinates
are inadmissiblo aro specified in loading insiructions. ean bo easily plotted as roctangulars. The sent of gravity of Ute
In warship design, bending moments and sheating forces aro area olitainod: and that of the ship should ubyiously apport tn
dotermined for light conditions of loading and for conditions which the same vertical
correspond to a normal displacement and full-load displacement
Th each of the cases, the distribution of stores (fuel, water, lubrl.
cants) should he exactly the samo as this is the practies unves
aetual eervice conditions. As far as warship design abzoad is eo
Gerned, it is assumed that the most severo con ditious of straining i
Will take place when a ship on a wave crost carries ammunition Dew EWS oe eT
but no water and fuel uboard, or when she is in a wave trough '
and fully loaded '
1, Caleulation of the Statie Component
i Il is standard practice in the USSR to determine first the still
wator bending moments and shearing forces and then add to them
the wave bending moments and shearing forces. But in some
: instances the xesul:ant bending.moments and shearing forces may ae
be dotormined directly, which is common practice in ship design Fig. 8. Weight carve
abroad
Whilo tho still water bending snomonts and. shwaring fares
ng the Lotal weight, a merelan|
vary In magnitude depending én tho ship's length and the way tho _purposo of ealoulating the total weight,
divided into the following weight groups:
loading and support aro distributed throughout it; the wave bond, vessel
' ing moments ond shearing forces, both in sagging and hogging, (1) hn
i owo their origin mainly to a redistribution af support, The manrer @) machinery; “oe
in which tis occurs is alfected by ship's lines, Wave huight fk mad = @) ship stores, crew, provisions;
(4) cargo;
foo ater, Iubricants;
(6) reserve -uayane:
Bel title groups to eubaivded lala subgroups, By way of
illustration, the hull weight group consists of:
(a) not steel;
(h) carpenter work;
(0) and (@) bull onginoering;
(0) equipment;
(0 clectrical machinery;
(2) wireless and navigational facilities.
wave longth 2, as well as the direction of wave advance
To calevlate the bending moments and shearing forces in a ship
i subject to longitudinal bending, first the conditions of loading
as represented by a wolght curve, and those of support, depicted
by a buoyancy curvo, should be determined. Working from the
above curves, a strength curve or a curve of loads is constructed
showing tho difference of the Torses of weight and buoyancy at all
points in the length. Finally, by integrating the curve of loads
Wo obtain the curve of shearing forces, which by a socond integra. i
scat... the enrve of bending momonis,
(A) The Weight Curve. Sinco it shows the way in whiel the
: o 1 in turn, is further subdivided into hoadings.
: various individual woights of a ship arv disteibuted. Uroughout "Each subgroup, in turn, is fu
' the Jengih, its ordinates, if laid down to a cortain scale, depiel ‘Thoso relating to the net-steel group arv:
i‘ tho weights per unit length of the ship (Tig. 8) (i) shell platin,
(11) nner dee
i) inner bottom; ete.
‘The weights included into a typical summary are classed as
fixed woights (the hull, hull engineering, machinery, hull flings,
fauipment, permanent ballast, etc.) and variable Weights (cargo
uel, water, lubricants, water ballast, erew, passengers, pros
sions, ship’ stores, reserve buoyancy).
piPending on the distribution of the individual weights, thoy
fall into thres categories:
(1) uniformly distributed weights (side, deck aud inner bottom
plating, ote.);
Fig, 9. Construction of a hull weight curve:
9 for ship with ong middle body 6 — for ahip with short midato
ty
2) non-uniformly distributed. woights,-i.e., covering a distance
in excess of 1/50th of the ship's length (superstructures, dec
houses, platforms, shafting, machicory and its auxiliaries, appli-
anges, ete.);
(3) concentrated weights which cover a very small distance foro
and aft (transverse bulkheads, masts, somo items of equipment,
propellers, anchors, ota.)
‘Thoro aro several methods of drawing the weight curve. Tho
most tedious oporntion involved is the construction of the hull
woighl curvo, for it takes into account the weight of such items
‘8 heat insulation, hull engineoring and fittings, ete.
With all tho ways londing to the samo result, il is advisable
(0 tako tho one loss stronuows, yet, offering a good accurnoy.
Hy, therefore, to make a ruonsse to one of the
oxisting approximate methods of constructing the hull weight
carve, discussed below, provided the total Inull weight and the
longitudinal centre of gravity are given.
The first method. The stepped hull weight curve may bo druwn
on the assumption that in a fall-formed ship with a parallel middle
body the weights are uniformly distributed over a length of eight
frame line spacings about amidships (Fig. 1a). As fat as a fne-
formed ship with a shorter middle bady is concerned, the sume
assumption is true of a distance of six frame line spacings about
unidships (Fig. 90). i
‘Tho woight g por frame line spacing amidships and the weights
fy and gy at the ends are found from the following relations| ips
whore G = ull seoight > &' Bera lambsaey
2m Myy and my = coetfcionts. f
‘According ta Kurdumey, tho coefficient m =~ 1.18 (it varies
from ship to ship). Thon tha wo other enelfeients inay bo de er
for tho curve in Fig. 9e
Mg 0.667 - 0.3658),
m, = 0.667 — 0.3658),
for tho curve in Fig. 95
mq = 0.730-+ 0.3338,
pistes ‘my = 0.730— 0.333%,
where & = i Jande bote Ioered ee Mebsie
2, = distance of the centre of gravity from true midship
AL = frame line spacing. sara
For middle body cight tram fine spacings, eng (Fig. Sia),
Une values Ay and Ay are obtained from ihe ejuations
amy
ow
5 ow
lo Hrame Tine spacings long (Fig. 90), the
above equations take the form
‘Tho moment of the triangle / about x calculate
equation
7
elt
j shifts Uho contro of gravity of the area P, for a distance
m7 yt
a Pe
dye {igond method. Applicable to ships with a parallel middle
ody. ike sho foragoing’ mothed, this one is Waele enna | Honeo
in ahip design abroad. ‘The hull ‘weight curve 1s deme oe ‘the oe
4 assumption that the weight is represented by 2 rectangle about 2
I amidships and two trapezoids in the ends. The ship's length Z iH In order to shift the centre of gravity of the aren P, towards
| ttue midship so that it would be conlaiied in tho latiec, ‘1
Fi
Fig. 10, ConsinicLou of « bull weight carve, ship vith
i patafet mile body fh
hall weight curve,
mile hoy
| Fig. 14, Construction of
i ship without paral
is obvions that the following relativuship should hold true
is divided into threo aqua! portions and at the lucattons obtained ©
ordinates of tho numerics) values given in Fig. 10 ae ocd | es Dee
f amidships and at the ends. ‘The area of tho figure shown ta Siena
j will he given thon by pee ie ‘The ond ordinates have to be equal in this case and are fourd
i from
GB Y 0.06 -
Bole
P= 8) 41.1954 S28) og ! (0.653— 0.048)
When the ordinates amidships and at the ends are of the value
given. the position of the contre of gravity of area Py and. ee |
suuently, of tho hull will he located at a distance ay = O.0cher |
att of tue midship
IF the contre of gravity of tho area ropresenting the hull weight
Appears fo ho wot in the same vertical with tho contre of gravity
: sive the end urdinates should be adjusted correspondingly,
‘he third method. Widely used abroad for ships with no parallo}
ilddle body, this method involves the construction of a parnbo:a
sueve the Feetangle (Tig. 11), the area under each ropresonting
one-half of tho total hull weight G. The ordinate for the rectangre
his is accomplished by transferring from one trapetold tein lr portion is 3%; the maximum ordinate for the parabolic.
{iiher a certain woight represented by a triangle (shawn by doteca
Hines in Pig. 10). The point of application of the centro of graviay ' portion is K Both ordinates are, of carso, to an appre=
of tho triangle / =) y %, whero y is the base of tho triangle, priate scale. i
The combined area P, = 525 4 2927, .. G has its omteg
1
Will be consequently shifted a distance x = 77,
- bh tho required contey of
of gravity at true midship. If, however
el he bow or the stern, the necessary
Porreetion niny be introdueod on the lines similar to those em-
ployed in the foregoing method of drawing the hull weight curve.
Mere this is achieved by “swinging” the base line, as shown in
Fig. 11, to obtain the two (wiangles partly drawn in dotted lines.
With the centres of gravity of hoth triangles spaced 27 apart,
Gai provid) (he area of ol ecg wa ee tor roman
iu tos ironafreihg'k alght rom ana endo: 1h6 ciber aay bo
Uelerinined from the equation
Wh
me fa
The desived shift of the centro of gravity of the total area is
Ee
Micro G
Hence
Gm
Mera
IF tho distance 2» of Uhe'hall’s contre of gravity from true mitl-
ship is kaown from the weight summary, there is no much dit
fieulty in obtaining from Uke above equation the buse x of the
Iriangle transferred in order Ln place the centre of gravity of the
ave anid Hu of the hull int the same vertical. The original value
of tho area remains thus unaltered, while its ordinates are cor-
reeleul
The geometrical diagram obtained by employing either the
weroud ar the third method of cousirnetion is Lrausformed eves
luaily inte a stepped diagram af an equivalent area and with an
eynivatent position of the contre of gravity.
Tho total weight curve is formnd on the assumption that. all
Hho othor scvights are uniformity aisheilwted within a frame tine
spacing. They aro cansequontly added as ordinates Lo the stepped
weighh curve. ‘This motitod gives approximate moments, bul Lhe
overall accuracy is 98 per cent,
A shear plan showing
1) disivilution of the weights and positions of their contro:
ravily Hhronghout ship's length, and
(hb) frame finns
foelitatos Une construction of the stayped weight curve which is
Jail ont on this plan
(8) The Ruoyaney Curve.This one shows how the vertical com
ponent af the watoe prasairo changes wilh, the distibyition af vol
Gime of displacement Uuroughout the ship's lougtlt. The way U
(
volume of displacomont is distributed may bo determined, in
turn, on the basis of Bonjean’s curves and the position of water-
Jines. Tho procedure employed in constructing tho buoyancy
curvo is especially simple in still water, when it is represented
by a curve of areas multiplied by the density of water y (to trans-
Inte volumes into forces). The ordinates of the buoyaney curve
are plotted to a tm scale. i
(J) Vessel in still water. First, the waterline in use is drawn in
its posi-ion between the points corresponding to the respective
2 © 0 3 3
Fig, 42. Curve ot areas (1) en buoyancy eurve (2), sip in sen
‘vase
siraught readings on the forward and after draught scales. On com:
pleting this, the areas of the immersed portions, as represented
hy ordinates of a curve of areas al each of Lhe Lwenty one frame
lines. are determined using Bonjean's curves. By multiplying
the ordinates of the curve of areas by y and drawing a smootit
curve through the new ordinates thus obtained we get the buoyan-
cy curve (Fig. 12). To simplify furthor calculations, this cut¥s
is thon transformed into a stepped one (Fig. 13) of an equivalent
ares anil with tho contro of gravity positioned so that it is in the
Saine vertical with that of the original geometrical diagram.
Assuming that the buoyancy is uniformly distributed within
a frame line spacing AL, its mean value por frame space will be
deh PO Any
where o, and ops; = areas of immersed portions at two adjacent
frame lines ¢ and i +4.
(2) Vessel among waves. When the vessel is assumed to be sup-
ported on a wave, the buoyancy curvo should bo predicted with
due rogaed to the wave form at watorline,
While the wave contour al a waterline of a ship in rough sens
is changing persistently duo to pitehing, rolling, and heaving,
each of tho three motions is also alfected by sueh factors as the
angle between tho ship's course and the direetion of wave travel,
wave length and height, 8 well as the ship's speed. The mast
unfavourable in point of longitudinal strength are the conditions
”
‘When the ship is either hogging or sagging at right angles to the
ives of the same length as her own (Fig. 17), On the other hand,
phew the ship is poisod on waves of length botween reste weety
Keser tan her own, Uke support will be redistributed ina way
Fig. 13. Siopped heyaney eur
dierent bul Tittle from the support in still water (Pig. 14a)
Five saune will oesur when the crests are spaced wide apart and the
waves are conseynently sloping gently. This means thal in hoth
Wave form at waterline
latter cases thy wave bending momonts will differ but slightly
from the still water ones,
To determine the wavo bending moment component. under the
Most unfavourable conditions, the buoyaney curve is constructed
‘on The assumpLion that wave longth 2 bolweon erests ix tho sano
ais ship's length J, ou the summer loadline, this being true
Hath of hoggeing and sagging coud tins.
Wave length 4. has @ diroct bearing on wave height which may
he dotermined from the formula
Basod on many years’ studies into the behaviour of the sea
surface, this formula relates wave length and wave height. with
a fairly good dogroo of accuracy.
For coasting vessels, the wave parameters should be determined
by observations in a given locality.
Fig. 15, Trochoidal wave prolile construction
Apart. frow wave longth and wave height, the wave form is
auothee faclor fundamental in drawing Uke. buoyancy eurve, Tt is
xouerally accepted that. the wave form is of (rochoidal geometry
Wave profile construction. A trochoid is a curve which may be
rogariled as a generalization of the cycloid, and therefore is some.
Unies referred to as a prolate eyeloid
‘The trochoidal wave form may bo construeted geometrically,
assuming thal circle £ of radius 2 is rolling along track AB
of a lengih equal to the wave length from erost to erest (Fig. 15).
A joint on concentric generating circle J7 of radius 7 equal to mid
hoight of wave h/2 will then describe in the course of one revolu-
Linn a full troehoid
Since the crest-to-crest length of a trochoidal wave is equal to
the ship’s Iength, the radius of cirele J is
1
ar
he mothod of drawing a trochoidal wave surface employed
in naval architecture is as follows. The line of circle-contros whieh,
is as long ay L and Uhe eircunference of generating circle 77 are
divided hy twonty oquidistantly spacod points (if thore aro twenty.
frame Lines aly). Krom each location Uhus obtained in the ling
Chapter 1
LONGITUDINAL STRENGTH
4, Bending Moments, Shearing Forces,
‘Stresses, and Strains
‘The safe dimensions of any strength member may ho determined
if the designer knows:
AY the Joads it has to support;
(2) the actual stresses and deflections due to the loads i1aposed
(they ore doterminod by applying a certain method of stress anal-
ysis); an
(8) the values of allowable stresses and deflections.
By Nirlue of progross in naval architecture, the Joads acting
ona ship in a seaway may be ascertained with a faitly good degree
of accuracy. When they are known, there is practically no diffi.
culty in estimating the actual stressos.
Tho ever stringont requirements of speed and scaworthiness
that modern ships sre to moot ronder it nevessury 10, develop
4 method of doterminiag the dynamic loads coming on tho struc,
uro under certain sorvico conditions, Also. tho widespread nso
of welding in place of riveting calls for a moro comprehensive
evaluation of the various actions a ship has to resist, especially
fom the standpoint of local stross concentrations in limited areas
of welded hull
ship afloat, both in still water and among wavos, is subject
fo a bending action and may bo likened, as pointed out in Lhe
foregoing, to a hollow girder of variable cross section. Tho corte.
sponding bending moments and sheering forces at ony eross section
may bo resolved, dopending on thoie origin and uode of uolion
with respect Lo time, into throv components which aro discussed
bolow.
(1) Still water bonding moments and shearing forcos hrought
about by the particular conditions of loading and support. While
the former correspond to the distribution of the weight of all
particles in tho mass of a ship throughout hor lungti, the Latter
dopond on the forces of wator pressure which act upwards (a bal-
ance tho abovo weight and sorve to eonstilwte, if sumaned, 11 dis.
placement tonnage. Unlike warships, in inorshant ships th> still
wator bonding samont may vary approciably and. roach, igh
values deponing os Ioading. ‘To reduce this component in tis
magnitude, careful ballasting is required WI
pas-age in light conditions. ‘The usual sola
bending moment component is My.»
@) Wave bonding moments and’ shearing (a
honk comes inio play mainly due to a distribulioy
of support throughout tho length of a ship differant |
sti
water.
A vessel traversing waves iz subjoc: to pitehingy #Olllng, ail
euving. In other words, her each ond is alternably MMM bid
falling, she inclines from side to side and has a hodill notion:
up and down. ‘The amplitude of tho throu modes of ostillatian ix
influenced mainly by such factors as ratio of ship-to-wavo length,
wave height, angle betwoen ship's course and direction of wave
advance, and ship's speed. All the factors being anything but
constant, the inertial forces of the hull and those ef the houndary
layer, as well as the forees of resistance to the movement of a ship
impose on the hull additional Joads. ‘These, one may believe,
add to the loads due to the forces of water pressure and weight.
Way back at tho close of the 19th century, Academician
A. N. Krylov, a well-known Russian naval architect, has dovel-
oped a general theory of oscillation of the ship and suggested
a method for solving the equations af m " which permite cal
culation of the bending moments due to additional loads. Further
studies, howover, have shown that the maxiinutn values of bond:
Ing moments caleulatod acevrding Wo Krylov do uot exceed Uso
obiained on the assumption that the ship is undor static eondi=
tions, i.c., disregarding her motion and oscillation. This is why.
aul the strength calculations nowadays atv hased on static eons!
dorations only. In other words, the waves aro considered to be
stationary. It will be recalled, that in a vessel moving head on
Unrough waves of her own length each of tho bending moinent
components will he a maximum the instance either a crest ot
a ivongh is amidships
Whe te ship is on a crest, the forees of support increasw ainid-
ships and docroaso at the encls, as comparod with tho still water
conditions, and the vessel is hogging (Fig. 7). When the ship is
ina trough, the forces of support inerease al the ends and decrease
amidships. The vessel is said to be in sagging conditions, In inast,
cases, the values of bending moments aud slicnting forces caleula:
cd ina ship which either hogs or sags are much in excess of those.
btainoil in still water.
Wave hending moment components are denoted by Mwave.
‘Tho inagnitudo and sign of a wave ending moinont compo rent
change daponding on tho porioi af pitehing, Which, in Lorn. is
equal to dhe apparent wave putiad, Since tho Tatbee is muely in
Anda mungkin juga menyukai
- Diagram Alir Fungsi Elemen Pengukuran Pada Barometer Aneroid DanDokumen2 halamanDiagram Alir Fungsi Elemen Pengukuran Pada Barometer Aneroid DanleoBelum ada peringkat
- Ch.4 Morfologi Kaki, Sayap, AntenaDokumen17 halamanCh.4 Morfologi Kaki, Sayap, AntenaleoBelum ada peringkat
- Ikatan KimiaDokumen7 halamanIkatan KimialeoBelum ada peringkat
- Gas Ideal 2Dokumen3 halamanGas Ideal 2leoBelum ada peringkat
- Hukum Archimedes Dan PenerapannyaDokumen3 halamanHukum Archimedes Dan PenerapannyaleoBelum ada peringkat
- Makalah - Syarat-Syarat Dan Pola-Pola Pengembangan ParagrafDokumen8 halamanMakalah - Syarat-Syarat Dan Pola-Pola Pengembangan Paragrafleo33% (3)
- Tugas Akustik2 BisingDokumen11 halamanTugas Akustik2 BisingTina AlfathienBelum ada peringkat
- PenelitianDokumen54 halamanPenelitianmarintan nirmalasariBelum ada peringkat
- Aliran Pada PipaDokumen37 halamanAliran Pada PipaGilang ArdiBelum ada peringkat
- Jenis Jenis KapalDokumen29 halamanJenis Jenis Kapalfirman_immank1100% (1)