Anda mungkin juga menyukai
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Connection of Redundant I/O Devices To S7-1500: Lredio LibraryDokumen31 halamanConnection of Redundant I/O Devices To S7-1500: Lredio LibraryscribdkhatnBelum ada peringkat
- 3500 Monitoring SystemsDokumen12 halaman3500 Monitoring SystemsscribdkhatnBelum ada peringkat
- Industrial Diaphragm Valves: SaundersDokumen14 halamanIndustrial Diaphragm Valves: SaundersscribdkhatnBelum ada peringkat
- 10 Vedlegg DDokumen14 halaman10 Vedlegg DscribdkhatnBelum ada peringkat
- Equipment Marking: IEC/CENELEC (Global/Europe) ATEX (European Union)Dokumen1 halamanEquipment Marking: IEC/CENELEC (Global/Europe) ATEX (European Union)scribdkhatnBelum ada peringkat
- 6.6 Wiring Diagram 6.6.1 Version GCP-20 & AMG 3/NEBDokumen1 halaman6.6 Wiring Diagram 6.6.1 Version GCP-20 & AMG 3/NEBscribdkhatnBelum ada peringkat
- Diesel ECU and Fuel Injector DriversDokumen32 halamanDiesel ECU and Fuel Injector DriversscribdkhatnBelum ada peringkat
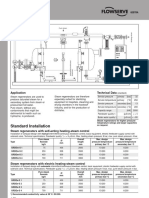
- Steam Regenerators: Application Technical DataDokumen1 halamanSteam Regenerators: Application Technical DatascribdkhatnBelum ada peringkat
- Extinguishing Control Unit A6V10061857 HQ enDokumen38 halamanExtinguishing Control Unit A6V10061857 HQ enscribdkhatn0% (1)
- Bently Nevada 22MDokumen9 halamanBently Nevada 22MscribdkhatnBelum ada peringkat
- Faults Detection in Gas Turbine Rotor Using Vibration Analysis Under Varying ConditionsDokumen14 halamanFaults Detection in Gas Turbine Rotor Using Vibration Analysis Under Varying ConditionsscribdkhatnBelum ada peringkat
- Boiler Controls and Systems: An OverviewDokumen8 halamanBoiler Controls and Systems: An OverviewscribdkhatnBelum ada peringkat
- An 3100D AnnunciatorDokumen4 halamanAn 3100D AnnunciatorscribdkhatnBelum ada peringkat
- Abhar Wire + Cable Co.: ISO 9002 QS-1147HHDokumen34 halamanAbhar Wire + Cable Co.: ISO 9002 QS-1147HHscribdkhatnBelum ada peringkat
- Power CadDokumen1 halamanPower CadscribdkhatnBelum ada peringkat
- t34 04 PDFDokumen10 halamant34 04 PDFscribdkhatnBelum ada peringkat
- GMS Flammable DetectionHeadDokumen1 halamanGMS Flammable DetectionHeadscribdkhatnBelum ada peringkat
- Csi BR Onlinemachinery PDFDokumen2 halamanCsi BR Onlinemachinery PDFscribdkhatnBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)