Anda mungkin juga menyukai
- 6th Central Pay Commission Salary CalculatorDokumen15 halaman6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- I2C Interface TutorialDokumen6 halamanI2C Interface Tutorialtomas duranBelum ada peringkat
- Complex Programmable Logic DevicesDokumen15 halamanComplex Programmable Logic DevicesAbd AhmmadBelum ada peringkat
- Bob Beck Protocol - Blood PurifierDokumen6 halamanBob Beck Protocol - Blood PurifierWb Warnabrother HatchetBelum ada peringkat
- Logic & Org Exp.1-7Dokumen30 halamanLogic & Org Exp.1-7Jewel DebnathBelum ada peringkat
- Pic Lab Ii Manual PDFDokumen7 halamanPic Lab Ii Manual PDFthanhvietnguyen100% (1)
- How To Build A USB Device With A PIC 18F4550 or 18F2550Dokumen12 halamanHow To Build A USB Device With A PIC 18F4550 or 18F2550Adenilson Pipino100% (1)
- Thermocouple PDFDokumen24 halamanThermocouple PDFPutri rafitaBelum ada peringkat
- Thermocouple 932885 PDFDokumen25 halamanThermocouple 932885 PDFPutri rafitaBelum ada peringkat
- PointLess LED ArrayDokumen5 halamanPointLess LED ArrayFranc MejiBelum ada peringkat
- Tutorial - Arduino and The I2C Bus - Part OneDokumen18 halamanTutorial - Arduino and The I2C Bus - Part OneSigid AriewibowoBelum ada peringkat
- Lab LCDDokumen6 halamanLab LCDJesus Cotrina100% (1)
- A Simple Digital Thermometer: ContentDokumen13 halamanA Simple Digital Thermometer: ContentKumar SamvatBelum ada peringkat
- PCF8591 1Dokumen7 halamanPCF8591 1Ashesh PradhanBelum ada peringkat
- Interfacing With The ISA BusDokumen12 halamanInterfacing With The ISA BusseyfiBelum ada peringkat
- Lab 4: Keypad and I/O Port Expansions: EEL 4744 - Spring 2012Dokumen5 halamanLab 4: Keypad and I/O Port Expansions: EEL 4744 - Spring 2012Steven SimonBelum ada peringkat
- Hands-On I2C Arduino - Practical GuidedDokumen6 halamanHands-On I2C Arduino - Practical Guidedecouwoo@scribdBelum ada peringkat
- EC8711 Embedded Lab Manual FinalDokumen258 halamanEC8711 Embedded Lab Manual FinalbloomeceBelum ada peringkat
- 0008 - Programming Part 2Dokumen6 halaman0008 - Programming Part 2Animesh GhoshBelum ada peringkat
- PIC 12F675 Microcontroller TutorialDokumen8 halamanPIC 12F675 Microcontroller Tutorialmihaip2967% (3)
- Wired Communication Between Two Arduinos: Graham Lambert Arduino 4Dokumen75 halamanWired Communication Between Two Arduinos: Graham Lambert Arduino 4Olakanmi OluwatobiBelum ada peringkat
- Inter-Integrated Circuit (I2C) : Karthik Hemmanur ECE 480-Design Team 3 Fall 2009Dokumen8 halamanInter-Integrated Circuit (I2C) : Karthik Hemmanur ECE 480-Design Team 3 Fall 2009gluciferBelum ada peringkat
- Evaluation Board s08dz60Dokumen2 halamanEvaluation Board s08dz60Warren O LeddaBelum ada peringkat
- Lab 1 Familiarization With Digital Logic GatesDokumen7 halamanLab 1 Familiarization With Digital Logic Gatespioneer boysBelum ada peringkat
- CSE3216-Lab ManualDokumen9 halamanCSE3216-Lab ManualAdward SnowdenBelum ada peringkat
- I2c ThesisDokumen7 halamanI2c Thesisannmontgomeryjackson100% (1)
- Draft ArticleDokumen6 halamanDraft ArticleGabriel UlloaBelum ada peringkat
- Orca Share Media1617078034640 6782516869006267082Dokumen16 halamanOrca Share Media1617078034640 6782516869006267082Pocong NiñaBelum ada peringkat
- WinPicProg PIC TutorialDokumen3 halamanWinPicProg PIC TutorialPrabodaLakruwanRupanandaBelum ada peringkat
- Ability Enhancement Lab Manual Atria ITDokumen45 halamanAbility Enhancement Lab Manual Atria ITGayatri JoshiBelum ada peringkat
- 20 C++ ATmega I2C Serial CommDokumen14 halaman20 C++ ATmega I2C Serial CommAnatronics LabBelum ada peringkat
- Ladder Logic For PIC and AVRDokumen9 halamanLadder Logic For PIC and AVRCarlos Cesar MaiaBelum ada peringkat
- STMW Internet - of - Things - Lab - ManualDokumen50 halamanSTMW Internet - of - Things - Lab - ManualthummalakuntasBelum ada peringkat
- Ladder Logic For PIC and AVRDokumen6 halamanLadder Logic For PIC and AVRTomás Totaro100% (1)
- Exploring I2cDokumen6 halamanExploring I2cspyeagleBelum ada peringkat
- Traffic LightDokumen19 halamanTraffic LightDianne ParBelum ada peringkat
- Chapter - 1Dokumen16 halamanChapter - 1nileshchaurasiaBelum ada peringkat
- LC MeterDokumen10 halamanLC MeterYenidir TeknoBelum ada peringkat
- Internet of Things Lab Manual Up DateDokumen53 halamanInternet of Things Lab Manual Up DateASHU KBelum ada peringkat
- Embedded Sysytem FileDokumen52 halamanEmbedded Sysytem FileGagan MaggoBelum ada peringkat
- UCF - Arduino - Lesson 1Dokumen23 halamanUCF - Arduino - Lesson 1sandeepsharma707100% (1)
- Parallel Port LabviewDokumen5 halamanParallel Port LabviewTacu Alexandru0% (1)
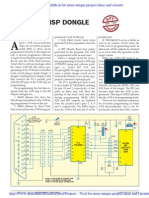
- ATMEL DongleDokumen3 halamanATMEL DonglechakralabsBelum ada peringkat
- Arduino Thermometer With 7-Segment LEDDokumen26 halamanArduino Thermometer With 7-Segment LEDRohit AdnaikBelum ada peringkat
- Communication Between ADC0804 and 8051Dokumen12 halamanCommunication Between ADC0804 and 805121070106 Nguyễn Xuân ThếBelum ada peringkat
- Lec1 Basic PWR SupplyDokumen19 halamanLec1 Basic PWR SupplyNagendra KashyapBelum ada peringkat
- University Automoma of Queretaro Engineering Faculty: Digital System 2Dokumen15 halamanUniversity Automoma of Queretaro Engineering Faculty: Digital System 2Carlos Eduardo Martínez Hernández100% (1)
- Peripheral Interfacing + Coding: Lets Learn How To Do It in 8051 !!Dokumen44 halamanPeripheral Interfacing + Coding: Lets Learn How To Do It in 8051 !!malhiavtarsinghBelum ada peringkat
- Tim's Blog Light - WS2812 Library V2.0 - Part I: Understanding The WS2812Dokumen15 halamanTim's Blog Light - WS2812 Library V2.0 - Part I: Understanding The WS2812jijoBelum ada peringkat
- This Document Explains How The SC12 IPC@CHIP Is Put Into Operation. The DK40 Evaluation Board Is Used Through This ManualDokumen16 halamanThis Document Explains How The SC12 IPC@CHIP Is Put Into Operation. The DK40 Evaluation Board Is Used Through This ManualHans-Joerg KasperBelum ada peringkat
- How 20to 20build 20a 20USB 20device 20with 20PIC 2018F4550 20or 2018F2550 20 28and 20the 20microchip 20CDC 20firmware 29 20Dokumen12 halamanHow 20to 20build 20a 20USB 20device 20with 20PIC 2018F4550 20or 2018F2550 20 28and 20the 20microchip 20CDC 20firmware 29 20Iordan Dan Ffn100% (1)
- BoxDokumen20 halamanBoxu2006262918Belum ada peringkat
- MPI Module-1 4Dokumen3 halamanMPI Module-1 4d4e5e5p20Belum ada peringkat
- PC Interfacing Fourth Level Lecture Seven QuestionsDokumen3 halamanPC Interfacing Fourth Level Lecture Seven Questionsأسامة المياحيBelum ada peringkat
- Shift Registers - 74HC595 & 74HC165 With ArduinoDokumen26 halamanShift Registers - 74HC595 & 74HC165 With Arduinochafic WEISSBelum ada peringkat
- I2C Interfacing To XC3S400 FPGADokumen14 halamanI2C Interfacing To XC3S400 FPGAMahesh BhatkalBelum ada peringkat
- Cpe 004-0-99 BCD Counter Final ProjectDokumen21 halamanCpe 004-0-99 BCD Counter Final ProjectJerc ZajBelum ada peringkat
- Co Lab Manual IIDokumen48 halamanCo Lab Manual IITanvi JainBelum ada peringkat
- WS File 1Dokumen13 halamanWS File 1rhythm 2021Belum ada peringkat
- Wiz Fi 250Dokumen12 halamanWiz Fi 250Sigid AriewibowoBelum ada peringkat
- Printing IEC-A - BASE DetergentDokumen1 halamanPrinting IEC-A - BASE DetergentSigid AriewibowoBelum ada peringkat
- Ske MaticDokumen2 halamanSke MaticSigid AriewibowoBelum ada peringkat
- Hana Car AkaDokumen1 halamanHana Car AkaSigid AriewibowoBelum ada peringkat
- Talk - Wifi Shield (Fi250) - WikiDokumen2 halamanTalk - Wifi Shield (Fi250) - WikiSigid AriewibowoBelum ada peringkat
- Infrared Circuits For Remote ControlDokumen3 halamanInfrared Circuits For Remote ControlSigid AriewibowoBelum ada peringkat
- How To Network Five Arduinos (Or More) Using I2C - TechBitarDokumen6 halamanHow To Network Five Arduinos (Or More) Using I2C - TechBitarSigid AriewibowoBelum ada peringkat
- Arduino WiFi Shield and Web Server TutorialDokumen3 halamanArduino WiFi Shield and Web Server TutorialSigid AriewibowoBelum ada peringkat
- Arduino Development EnvironmentDokumen7 halamanArduino Development EnvironmentSigid AriewibowoBelum ada peringkat
- Patch Nero 12Dokumen1 halamanPatch Nero 12Sigid AriewibowoBelum ada peringkat
- 2wta-B inDokumen4 halaman2wta-B inSigid AriewibowoBelum ada peringkat
- BerryJam - Simple I2C Protocol For Advanced Communication Between ArduinosDokumen12 halamanBerryJam - Simple I2C Protocol For Advanced Communication Between ArduinosSigid AriewibowoBelum ada peringkat
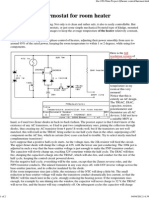
- Thermostat For Room HeaterDokumen2 halamanThermostat For Room HeaterSigid AriewibowoBelum ada peringkat
- Hardwired Smoke Detector 2editDokumen1 halamanHardwired Smoke Detector 2editSigid AriewibowoBelum ada peringkat
- Thermal PDFDokumen29 halamanThermal PDFSigid AriewibowoBelum ada peringkat
- Wireless Remote DC3V 250 PDFDokumen1 halamanWireless Remote DC3V 250 PDFSigid AriewibowoBelum ada peringkat
- AC100 250 Volt 50 60Hz Wall Mount Bipolar Infrared PIR Motion Sensor Auto Switch - Ebay PDFDokumen5 halamanAC100 250 Volt 50 60Hz Wall Mount Bipolar Infrared PIR Motion Sensor Auto Switch - Ebay PDFSigid AriewibowoBelum ada peringkat
- Modem WifiDokumen4 halamanModem WifiSigid AriewibowoBelum ada peringkat
- UntitledDokumen1 halamanUntitledSigid AriewibowoBelum ada peringkat
- Rotary Encoder - Wikipedia, The Free EncyclopediaDokumen7 halamanRotary Encoder - Wikipedia, The Free EncyclopediaSigid AriewibowoBelum ada peringkat
- Changeover & by Pass SwitchesDokumen12 halamanChangeover & by Pass Switcheshemant kumarBelum ada peringkat
- General-Purpose Switching Device Applications: N-Channel Silicon MOSFETDokumen4 halamanGeneral-Purpose Switching Device Applications: N-Channel Silicon MOSFETjose luisBelum ada peringkat
- Design and Implementation of VLSI SystemsDokumen45 halamanDesign and Implementation of VLSI SystemsLê Bá Phước LongBelum ada peringkat
- C26x EnM C6pDokumen1.446 halamanC26x EnM C6pABDERRAHMANE JAFBelum ada peringkat
- NYY-J Power Cable: DimensionsDokumen2 halamanNYY-J Power Cable: DimensionsKushtrim MalaBelum ada peringkat
- S. Priya, "Advances in Energy Harvesting Using Low Profile Piezoelectric Transducers PDFDokumen18 halamanS. Priya, "Advances in Energy Harvesting Using Low Profile Piezoelectric Transducers PDFsuyBelum ada peringkat
- BN46 00557C Eng PDFDokumen44 halamanBN46 00557C Eng PDFJAGM1505Belum ada peringkat
- A3Pro User Manual v1.1 enDokumen18 halamanA3Pro User Manual v1.1 enintodroneidBelum ada peringkat
- AHS EHG Technical Paper No 22 - SynchronomeDokumen6 halamanAHS EHG Technical Paper No 22 - SynchronomeMichelBelum ada peringkat
- The Future of Electronics Manufacturing in India: ClustersDokumen8 halamanThe Future of Electronics Manufacturing in India: ClustersNUTHI SIVA SANTHANBelum ada peringkat
- Chapter1 Det10013Dokumen30 halamanChapter1 Det10013che syakirBelum ada peringkat
- RK 49 - Ds - en PDFDokumen5 halamanRK 49 - Ds - en PDFPedro Javier Castro SanchezBelum ada peringkat
- Transmission Details - PB2Dokumen3 halamanTransmission Details - PB2Daniel Herrera AstudilloBelum ada peringkat
- 19 Inch LCD COLOR MONITOR SERVICE MANUAL HP L1940T NT68663MEFG A02 PDFDokumen52 halaman19 Inch LCD COLOR MONITOR SERVICE MANUAL HP L1940T NT68663MEFG A02 PDFRendy Adam FarhanBelum ada peringkat
- EEE418 Embedded SystemDokumen13 halamanEEE418 Embedded SystemABDULLAH AL BAKIBelum ada peringkat
- Dsei2x101 12a IxysDokumen2 halamanDsei2x101 12a IxyssongdashengBelum ada peringkat
- Arduino Based Dry & Wet Automatic Floor CleanerDokumen5 halamanArduino Based Dry & Wet Automatic Floor CleanerJuthik BVBelum ada peringkat
- Conventional Reflective Beam Detector: Feature and BenefitsDokumen3 halamanConventional Reflective Beam Detector: Feature and BenefitsTâm Nguyễn ĐứcBelum ada peringkat
- Zach WestDokumen8 halamanZach WestAleksa Nataša RančićBelum ada peringkat
- What Is ESP32 SIM800L BoardDokumen14 halamanWhat Is ESP32 SIM800L BoardjackBelum ada peringkat
- Act 2 - Basic Programming Using C++Dokumen2 halamanAct 2 - Basic Programming Using C++Kyle ManlongatBelum ada peringkat
- Homebrewing A SI5351 Breakout Board and VFODokumen17 halamanHomebrewing A SI5351 Breakout Board and VFOrknmidi0% (1)
- Catalogue - OsiSense XC - Standard - EN PDFDokumen146 halamanCatalogue - OsiSense XC - Standard - EN PDFIon MoldoveanuBelum ada peringkat
- Week1 LecA 2024Dokumen45 halamanWeek1 LecA 2024yoyolamlyy0511Belum ada peringkat
- Voltage Quadrapular Yashojeet 22Dokumen14 halamanVoltage Quadrapular Yashojeet 22Yashojeet PurohitBelum ada peringkat
- Flyback Bias Winding and Transformer LeakageDokumen10 halamanFlyback Bias Winding and Transformer LeakageThanhha NguyenBelum ada peringkat
- Mte 1102-1Dokumen64 halamanMte 1102-1SHAGORBelum ada peringkat
- 440 - Example OHL Setting - 1-54Dokumen1 halaman440 - Example OHL Setting - 1-54varofBelum ada peringkat
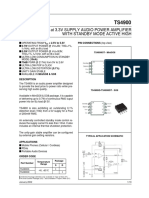
- 300Mw at 3.3V Supply Audio Power Amplifier With Standby Mode Active HighDokumen19 halaman300Mw at 3.3V Supply Audio Power Amplifier With Standby Mode Active HighPanagiotis PanagosBelum ada peringkat