Anda mungkin juga menyukai
- Valdamar Valerian - Matrix IVDokumen1.098 halamanValdamar Valerian - Matrix IVpeterspm100% (11)
- CH 3 Matrices Multiple Choice Questions (With Answers)Dokumen3 halamanCH 3 Matrices Multiple Choice Questions (With Answers)CRPF School75% (8)
- Exercise Questions Finals-2Dokumen22 halamanExercise Questions Finals-2Faiza AliBelum ada peringkat
- MatricesDokumen47 halamanMatricesAngel Lilly100% (6)
- Engineering Mathematics Iii: KNF 2033 Semester 1 2011/2012Dokumen30 halamanEngineering Mathematics Iii: KNF 2033 Semester 1 2011/2012tulis88Belum ada peringkat
- Matrix Algebra PDFDokumen33 halamanMatrix Algebra PDFagrbovicBelum ada peringkat
- Tea Lec NoteDokumen27 halamanTea Lec NoteAlex OrtegaBelum ada peringkat
- 2 Matrices and Linear EquationsDokumen34 halaman2 Matrices and Linear EquationsChris DevlinBelum ada peringkat
- NC 10Dokumen12 halamanNC 10Hamid RehmanBelum ada peringkat
- Algebra of MatrixDokumen14 halamanAlgebra of MatrixRajeenaNayimBelum ada peringkat
- UNIT 4 MatricesDokumen75 halamanUNIT 4 MatricesKamal MittalBelum ada peringkat
- Tutorial MATLAB Matrix NotationDokumen10 halamanTutorial MATLAB Matrix NotationgeorgesmaccarioBelum ada peringkat
- Chapter Two: Matrix Algebra and Its ApplicationsDokumen14 halamanChapter Two: Matrix Algebra and Its ApplicationsAbrha636Belum ada peringkat
- Cpe-310B Engineering Computation and Simulation: Solving Sets of EquationsDokumen46 halamanCpe-310B Engineering Computation and Simulation: Solving Sets of Equationsali ahmedBelum ada peringkat
- Topic One Mathematical MethodsDokumen7 halamanTopic One Mathematical MethodsMuya KihumbaBelum ada peringkat
- Ch-2 Lecture NoteDokumen55 halamanCh-2 Lecture Notedtesfaye6395Belum ada peringkat
- Appendix and IndexDokumen104 halamanAppendix and IndexkankirajeshBelum ada peringkat
- Mathematical FundamentalsDokumen13 halamanMathematical Fundamentalsjeygar12Belum ada peringkat
- Maths. Matrix AlgebraDokumen59 halamanMaths. Matrix AlgebrasamtamenetolaBelum ada peringkat
- Tutorial 6 - Introduction To Matrices - 2010Dokumen10 halamanTutorial 6 - Introduction To Matrices - 2010Omar LSBelum ada peringkat
- 2matrices Its OperationsDokumen27 halaman2matrices Its OperationsJoelar OndaBelum ada peringkat
- Module 1 Determinants:: F (A) K, Where ADokumen0 halamanModule 1 Determinants:: F (A) K, Where AManish MishraBelum ada peringkat
- "Just The Maths" Unit Number 9.1 Matrices 1 (Definitions & Elementary Matrix Algebra) by A.J.HobsonDokumen9 halaman"Just The Maths" Unit Number 9.1 Matrices 1 (Definitions & Elementary Matrix Algebra) by A.J.HobsonMayank SanBelum ada peringkat
- Usme, Dtu Project On Matrices and Determinants Analysis BY Bharat Saini Tanmay ChhikaraDokumen17 halamanUsme, Dtu Project On Matrices and Determinants Analysis BY Bharat Saini Tanmay ChhikaraTanmay ChhikaraBelum ada peringkat
- Chapter 23Dokumen25 halamanChapter 23Jayaraj LathaBelum ada peringkat
- Chapter 3 Lae1Dokumen27 halamanChapter 3 Lae1razlan ghazaliBelum ada peringkat
- Linear Algebra Chapter 3 - DeTERMINANTSDokumen24 halamanLinear Algebra Chapter 3 - DeTERMINANTSdaniel_bashir808Belum ada peringkat
- Pre-Calculus / Math Notes (Unit 15 of 22)Dokumen14 halamanPre-Calculus / Math Notes (Unit 15 of 22)OmegaUserBelum ada peringkat
- Lecture 10Dokumen17 halamanLecture 10amjadtawfeq2Belum ada peringkat
- Matrix Algebra ReviewDokumen16 halamanMatrix Algebra ReviewGourav GuptaBelum ada peringkat
- 1 Topics in Linear AlgebraDokumen42 halaman1 Topics in Linear AlgebraArlene DaroBelum ada peringkat
- Linear AlgebraDokumen36 halamanLinear Algebrarajesh.shirwal382Belum ada peringkat
- Introduction To Matrices: 2.14 Analysis and Design of Feedback Control SystemsDokumen9 halamanIntroduction To Matrices: 2.14 Analysis and Design of Feedback Control Systemsberndjulie726Belum ada peringkat
- ES 21 First Exam NotesDokumen13 halamanES 21 First Exam NotesGil Kenneth San MiguelBelum ada peringkat
- Topic One Mathematical MethodsDokumen7 halamanTopic One Mathematical MethodsMuya KihumbaBelum ada peringkat
- 1.introduction To Matrix AlgebraDokumen20 halaman1.introduction To Matrix AlgebraRiko Chy MakBelum ada peringkat
- Notes On Matric AlgebraDokumen11 halamanNotes On Matric AlgebraMaesha ArmeenBelum ada peringkat
- All About MatricesDokumen14 halamanAll About MatricesMyla MuddiBelum ada peringkat
- Linear Algebra & Ordinary Differential Equations: Instructor: Dr. Naila AmirDokumen28 halamanLinear Algebra & Ordinary Differential Equations: Instructor: Dr. Naila AmirAbrar Ul HaqBelum ada peringkat
- Matrix Mathematics: AppendixDokumen9 halamanMatrix Mathematics: AppendixBright MuzaBelum ada peringkat
- KNF2033 Engineering Mathematics III: Msmfaizrizwan@feng - Unimas.myDokumen26 halamanKNF2033 Engineering Mathematics III: Msmfaizrizwan@feng - Unimas.myChing On HuaBelum ada peringkat
- Proof of The Cofactor Expansion Theorem 1Dokumen13 halamanProof of The Cofactor Expansion Theorem 1pasomagaBelum ada peringkat
- Matrices: Joseph Sylvester. Now, Matrices Have Become A Useful Tool in Solving BusinessDokumen13 halamanMatrices: Joseph Sylvester. Now, Matrices Have Become A Useful Tool in Solving BusinessSubhamBelum ada peringkat
- Chapter Two:Matrices and Its Applications Section One: Matrix ConceptsDokumen76 halamanChapter Two:Matrices and Its Applications Section One: Matrix ConceptsOromoo KhushBelum ada peringkat
- Math Majorship LinearDokumen12 halamanMath Majorship LinearMaybelene NavaresBelum ada peringkat
- MatricesDokumen76 halamanMatricesNaveenBelum ada peringkat
- Vectors MatricesDokumen15 halamanVectors MatricesSanjeev Neo JaiswalBelum ada peringkat
- CH 2 MatrixDokumen11 halamanCH 2 Matrixsamita2721Belum ada peringkat
- Matrices and Determinants: Ij Ij Ij Ij IjDokumen23 halamanMatrices and Determinants: Ij Ij Ij Ij Ijumeshmalla2006Belum ada peringkat
- MGMT 221, Ch. IIDokumen33 halamanMGMT 221, Ch. IIMulugeta Girma67% (6)
- Numerical Methods 6Dokumen45 halamanNumerical Methods 6Olga Diokta FerinnandaBelum ada peringkat
- MatricesDokumen4 halamanMatricesAniket DasBelum ada peringkat
- Chapter 2Dokumen18 halamanChapter 2api-3527095490% (1)
- Chapter 6Dokumen20 halamanChapter 6Shimeque SmithBelum ada peringkat
- Maths For Finance CHAPTER 2 PDFDokumen31 halamanMaths For Finance CHAPTER 2 PDFWonde Biru100% (1)
- Matrices 1Dokumen22 halamanMatrices 1Ekemini SundayBelum ada peringkat
- 2.2 Matrices in Matlab: IndexingDokumen30 halaman2.2 Matrices in Matlab: IndexingkiranmannBelum ada peringkat
- Excel DemasDokumen16 halamanExcel DemasDavidAlejoBelum ada peringkat
- Definitions of MatrixDokumen7 halamanDefinitions of MatrixneophymenBelum ada peringkat
- Properties of Matrices: IndexDokumen10 halamanProperties of Matrices: IndexYusok GarciaBelum ada peringkat
- Mathematics (Introduction To Linear Algebra)Dokumen36 halamanMathematics (Introduction To Linear Algebra)shilpajosephBelum ada peringkat
- Matrices with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")Dari EverandMatrices with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")Penilaian: 3 dari 5 bintang3/5 (4)
- Matrix Theory and Applications for Scientists and EngineersDari EverandMatrix Theory and Applications for Scientists and EngineersBelum ada peringkat
- Cambridge IELTS 8 - Test 2Dokumen1 halamanCambridge IELTS 8 - Test 2Igor M FarhanBelum ada peringkat
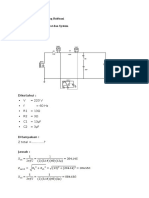
- Nama: Fasdailhaq Robbani Nim: I0714013 Tugas Mata Kuliah Isyarat Dan SystemDokumen2 halamanNama: Fasdailhaq Robbani Nim: I0714013 Tugas Mata Kuliah Isyarat Dan SystemIgor M FarhanBelum ada peringkat
- PCB Wizard - Professional Edition - SensorDokumen1 halamanPCB Wizard - Professional Edition - SensorIgor M FarhanBelum ada peringkat
- B18 LectureADokumen58 halamanB18 LectureAJubin JainBelum ada peringkat
- 1003 5432Dokumen6 halaman1003 5432Restu H. SaputraBelum ada peringkat
- 17 - Igor M Farhan - Tugas 10 Program Matlab BAB 10 & 11Dokumen7 halaman17 - Igor M Farhan - Tugas 10 Program Matlab BAB 10 & 11Igor M FarhanBelum ada peringkat
- 2-Sistem Persamaan Aljabar Linier-Sjk-01 (Compatibility Mode)Dokumen23 halaman2-Sistem Persamaan Aljabar Linier-Sjk-01 (Compatibility Mode)StepanusBelum ada peringkat
- ETC ExtraDokumen11 halamanETC Extraobelix2Belum ada peringkat
- Matrix Method For Analysis of Hydraulic NetworksDokumen9 halamanMatrix Method For Analysis of Hydraulic NetworksJose2806Belum ada peringkat
- MATLAB Tutorial: MATLAB Basics & Signal Processing ToolboxDokumen47 halamanMATLAB Tutorial: MATLAB Basics & Signal Processing ToolboxSaeed Mahmood Gul KhanBelum ada peringkat
- Mathematics - IVDokumen4 halamanMathematics - IVAtish GhoshBelum ada peringkat
- MBA FYIC SEMSTER I To X 2019-20Dokumen117 halamanMBA FYIC SEMSTER I To X 2019-2024 Gautam SehgalBelum ada peringkat
- A Performance Model For Impact CrusherDokumen7 halamanA Performance Model For Impact CrusherAdil KhanBelum ada peringkat
- 2022RCIM-Learning-based Object Detection and Localization For A Mobile Robotmanipulator in SME ProductionDokumen12 halaman2022RCIM-Learning-based Object Detection and Localization For A Mobile Robotmanipulator in SME ProductionqclBelum ada peringkat
- Induction Machine Fault Detection Enhancement Using A Stator Current High Resolution SpectrumDokumen6 halamanInduction Machine Fault Detection Enhancement Using A Stator Current High Resolution SpectrumlucapaneBelum ada peringkat
- Laboratory Activity 1 - Introduction To MATLAB (Part1)Dokumen8 halamanLaboratory Activity 1 - Introduction To MATLAB (Part1)Nigel ArugayBelum ada peringkat
- How To Use A Quadrature Encoder - Let's Make Robots!Dokumen6 halamanHow To Use A Quadrature Encoder - Let's Make Robots!Anandha PadmanabhanBelum ada peringkat
- Numerical Simulation of Progressive Damage in Laminated Composites Due To Ballistic ImpactDokumen8 halamanNumerical Simulation of Progressive Damage in Laminated Composites Due To Ballistic ImpactBAswaniKumarBelum ada peringkat
- Problem Tutorial: "Minimum Spanning Trees": I, J 0,1 0, J I, JDokumen6 halamanProblem Tutorial: "Minimum Spanning Trees": I, J 0,1 0, J I, JRoberto FrancoBelum ada peringkat
- Selection of Shipping Freight Options in The New Paradigm of International Maritime Transport: Proposal of A Multicriteria ModelDokumen7 halamanSelection of Shipping Freight Options in The New Paradigm of International Maritime Transport: Proposal of A Multicriteria Modelfatima.ludovicoBelum ada peringkat
- Tutorial 4Dokumen3 halamanTutorial 4Ankit SharmaBelum ada peringkat
- Ebook Matlab Programming For Engineers PDF Full Chapter PDFDokumen67 halamanEbook Matlab Programming For Engineers PDF Full Chapter PDFerik.lopez596100% (22)
- Topic 2 Numerical Solution of Linear Simultaneous Equations & Matrices Gaussian EliminationDokumen18 halamanTopic 2 Numerical Solution of Linear Simultaneous Equations & Matrices Gaussian EliminationSyahmi RosliBelum ada peringkat
- Pointers C++ SlidesDokumen11 halamanPointers C++ SlidesHafiz YounasBelum ada peringkat
- State Testing, and Testability Tips. Power of A Matrix, Node Reduction AlgorithmDokumen13 halamanState Testing, and Testability Tips. Power of A Matrix, Node Reduction AlgorithmSeerapu RameshBelum ada peringkat
- A2andB1 EEE 212 Exp 10 Report WorkDokumen1 halamanA2andB1 EEE 212 Exp 10 Report WorkMusabbir Adnan TamimBelum ada peringkat
- LUMS EE - 1st Year Course OutlinesDokumen36 halamanLUMS EE - 1st Year Course OutlinesAhsan Ahmed MoinBelum ada peringkat
- 01 Linear Algebra 1 - ETL PDFDokumen148 halaman01 Linear Algebra 1 - ETL PDFChris SantiagoBelum ada peringkat
- Representative Transmission Coefficient For Evaluating The Wave Attenuation Performance of 3D Floating Breakwaters in Regular and Irregular WavesDokumen17 halamanRepresentative Transmission Coefficient For Evaluating The Wave Attenuation Performance of 3D Floating Breakwaters in Regular and Irregular Wavesفاعل خيرBelum ada peringkat
- Antennas and Propagation From A Signal Processing Perspective by Thomas Svantesson 2001Dokumen319 halamanAntennas and Propagation From A Signal Processing Perspective by Thomas Svantesson 2001Hizbu KhanBelum ada peringkat
- Togaf Question Bank 3Dokumen2 halamanTogaf Question Bank 3Ashraf Sayed AbdouBelum ada peringkat
- Introduction To Vectors and Matrices and Their OperationsDokumen29 halamanIntroduction To Vectors and Matrices and Their OperationsICT CRMNHSBelum ada peringkat
- Scan 15 Dec 2018 PDFDokumen25 halamanScan 15 Dec 2018 PDFNageshBelum ada peringkat