Anda mungkin juga menyukai
- 8 RTLinuxDokumen92 halaman8 RTLinuxeduardo jesusBelum ada peringkat
- SortDokumen12 halamanSortEstefany RamirezBelum ada peringkat
- Porqué Linux No Es Tiempo RealDokumen5 halamanPorqué Linux No Es Tiempo RealLucio Canché SantosBelum ada peringkat
- Sistemas Operativos en Tiempo RealDokumen4 halamanSistemas Operativos en Tiempo RealLaloXSBelum ada peringkat
- Sistema Operativo MultitareasDokumen6 halamanSistema Operativo Multitareasbeck_m50% (2)
- Segundo Taller SEDokumen10 halamanSegundo Taller SEElian Andrés Díaz VargasBelum ada peringkat
- Sistema Operativo en Tiempo RealDokumen3 halamanSistema Operativo en Tiempo RealAnonymous NL7KTamBelum ada peringkat
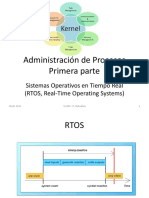
- RTOS Administración de ProcesosDokumen11 halamanRTOS Administración de ProcesosMario Castro VázquezBelum ada peringkat
- Tarea 3 Jesus BecerrilDokumen7 halamanTarea 3 Jesus BecerriljesusBelum ada peringkat
- Sistemas de Tiempo Real - Clasificación y CaracterísticasDokumen6 halamanSistemas de Tiempo Real - Clasificación y CaracterísticasDavid AbrilBelum ada peringkat
- Tema 15 - Sistemas de Tiempo RealDokumen8 halamanTema 15 - Sistemas de Tiempo RealCatherinne ChereyBelum ada peringkat
- Fdocuments - Ec Evolucion de Sisitemas OperativosDokumen35 halamanFdocuments - Ec Evolucion de Sisitemas OperativosJenderson Ryand Cruz RodriguezBelum ada peringkat
- TAREAGRUPALDokumen5 halamanTAREAGRUPALJuan DominguesBelum ada peringkat
- Sistemas de Tiempo RealDokumen8 halamanSistemas de Tiempo RealToñorro SkobedoBelum ada peringkat
- Sistemas Enbebidos y en Tiempo RealDokumen5 halamanSistemas Enbebidos y en Tiempo RealRobert JuaronBelum ada peringkat
- Tiempo - Real - 5 MODIFDokumen11 halamanTiempo - Real - 5 MODIFSantiago OrozcoBelum ada peringkat
- Cuestionario Sistemas Operativos MultiusuarioDokumen13 halamanCuestionario Sistemas Operativos MultiusuarioEd ValenciaBelum ada peringkat
- Resumen NucleoDokumen2 halamanResumen NucleoRaul Radulf100% (1)
- Tarea 7 - Sistema OperativosDokumen8 halamanTarea 7 - Sistema OperativosLeandro Ubrí LorenzoBelum ada peringkat
- RTOSDokumen34 halamanRTOSNico DomínguezBelum ada peringkat
- Arquitectura de Referencia para Sistemas de Tiempo RealDokumen6 halamanArquitectura de Referencia para Sistemas de Tiempo RealWilled Edwill100% (1)
- Clasificación de los Sistemas OperativosDokumen7 halamanClasificación de los Sistemas OperativosMoises DiazBelum ada peringkat
- Procesos en Estado BloqueadoDokumen6 halamanProcesos en Estado Bloqueadojoseant44Belum ada peringkat
- SistemaDokumen3 halamanSistemaAngel Polanco ChalasBelum ada peringkat
- Formacion Especifica Tarea ISE4 2 2Dokumen35 halamanFormacion Especifica Tarea ISE4 2 2Eyvy AlvaradoBelum ada peringkat
- Cuáles Son Los Posibles Estados Que Puede Tener Un ProcesoDokumen4 halamanCuáles Son Los Posibles Estados Que Puede Tener Un ProcesoRaphy MatosBelum ada peringkat
- Sistema Operativo de Tiempo Real PDFDokumen6 halamanSistema Operativo de Tiempo Real PDFyrag182Belum ada peringkat
- TEMA 15Dokumen22 halamanTEMA 15lpiloaceBelum ada peringkat
- 2.sistemas Operativos en Tiempo RealDokumen11 halaman2.sistemas Operativos en Tiempo RealLourenço Januário SessiBelum ada peringkat
- Sistemas OperativosDokumen6 halamanSistemas OperativosAngelica Perez PerezBelum ada peringkat
- UntitledDokumen11 halamanUntitledRaul RodriguezBelum ada peringkat
- Sistemas foreground background interrupcionesDokumen4 halamanSistemas foreground background interrupcionescreative lifenowBelum ada peringkat
- Investigacion Tema 1.6 NucleoDokumen11 halamanInvestigacion Tema 1.6 NucleoHyomin AraiBelum ada peringkat
- Sistemas operativos de tiempo real en dispositivos embebidosDokumen47 halamanSistemas operativos de tiempo real en dispositivos embebidosMario VeintimillaBelum ada peringkat
- FreeRTOS: Introducción al sistema operativo en tiempo realDokumen42 halamanFreeRTOS: Introducción al sistema operativo en tiempo realmicro_cadaverBelum ada peringkat
- Laboratorio Sis OP - 1er BimestreDokumen20 halamanLaboratorio Sis OP - 1er BimestreFlor Chaparro Brian EzequielBelum ada peringkat
- Caracteristicas de Sistemas OperativosDokumen9 halamanCaracteristicas de Sistemas OperativosSonia CermeñoBelum ada peringkat
- Clasificación de Sistemas OperativosDokumen6 halamanClasificación de Sistemas Operativosgustavo castilloBelum ada peringkat
- Sistema Operativo de Tiempo RealDokumen15 halamanSistema Operativo de Tiempo RealLinea Tiempo EspacioBelum ada peringkat
- SOTR: Sistemas operativos tiempo realDokumen16 halamanSOTR: Sistemas operativos tiempo realMiguel Llallihuaman CalderonBelum ada peringkat
- Taller Procesos SODokumen4 halamanTaller Procesos SOyesid moreraBelum ada peringkat
- Jhon Arista Alarcon - Trabajo SO Semana 2Dokumen3 halamanJhon Arista Alarcon - Trabajo SO Semana 2Jhon Arista AlarconBelum ada peringkat
- Practica 3Dokumen10 halamanPractica 3Edinson Rodolfo Corredor SalcedoBelum ada peringkat
- Guion Practica 1BDokumen23 halamanGuion Practica 1BSantiago Adrián Yánez MartínBelum ada peringkat
- 1er Examen ParcialDokumen5 halaman1er Examen ParcialDassaef TorresBelum ada peringkat
- Procesamiento Por LotesDokumen38 halamanProcesamiento Por LotesDaniel Lagos HernandezBelum ada peringkat
- Ejercicios y Preguntas Del Tema 1 ResueltoDokumen3 halamanEjercicios y Preguntas Del Tema 1 Resueltotatis.re.11Belum ada peringkat
- NucleosDokumen15 halamanNucleosZavier QuindeBelum ada peringkat
- 1 STR IntroDokumen48 halaman1 STR IntrochvfeBelum ada peringkat
- LXRTDokumen7 halamanLXRTr0ssumBelum ada peringkat
- Preguntas Teoricas Sistemas OperativosDokumen24 halamanPreguntas Teoricas Sistemas OperativosRoxana Garderes100% (1)
- Introducción A Los Sistemas Operativos y Administración de ProcesosDokumen27 halamanIntroducción A Los Sistemas Operativos y Administración de ProcesosCharly BraunBelum ada peringkat
- STR TeoDokumen344 halamanSTR TeoDIEGO ALEJANDRO CASTILLO RAYMEBelum ada peringkat
- SO CompletoDokumen38 halamanSO Completotamadite95Belum ada peringkat
- RtosDokumen56 halamanRtosElena_Huerta_H_1569Belum ada peringkat
- 8 Arquitectura SoDokumen41 halaman8 Arquitectura SoAlfredo Alexis Arevalo VenegasBelum ada peringkat
- Actividad 2Dokumen17 halamanActividad 2Milena Duarte GomezBelum ada peringkat
- Kernel para PDA Con Soporte A Procesos deDokumen19 halamanKernel para PDA Con Soporte A Procesos deJhoann ConchaBelum ada peringkat
- UF0852 - Instalación y actualización de sistemas operativosDari EverandUF0852 - Instalación y actualización de sistemas operativosPenilaian: 5 dari 5 bintang5/5 (1)
- Desarrollo de componentes software para el manejo de dispositivos. IFCT0609Dari EverandDesarrollo de componentes software para el manejo de dispositivos. IFCT0609Belum ada peringkat
- Camping Los Maitenes Precios 2020-2021Dokumen1 halamanCamping Los Maitenes Precios 2020-2021Martín ArbolBelum ada peringkat
- Desarrollo Orientado A Objetos Con UML (Libro-Book-Español-Spanish)Dokumen38 halamanDesarrollo Orientado A Objetos Con UML (Libro-Book-Español-Spanish)Samira100% (108)
- Analista universitario de sistemasDokumen6 halamanAnalista universitario de sistemasMartín ArbolBelum ada peringkat
- Apunte RUPDokumen54 halamanApunte RUPTriunfadora con AmorBelum ada peringkat
- Aprender A ROOTEARDokumen3 halamanAprender A ROOTEARAnonymous k2zQoUIBelum ada peringkat
- Pasar de Ext2 A Ext3Dokumen2 halamanPasar de Ext2 A Ext3Janiel NohBelum ada peringkat
- Documental Codigo LinuxDokumen3 halamanDocumental Codigo LinuxJefferson OrtizBelum ada peringkat
- Examen Del Capítulo 1 de Linux EssentialsDokumen18 halamanExamen Del Capítulo 1 de Linux EssentialsJavico Cevallos67% (3)
- Aprendegit PDFDokumen77 halamanAprendegit PDFAraceli Manzano ChicanoBelum ada peringkat
- Certificacion LpiDokumen3 halamanCertificacion LpiEnrique AndradeBelum ada peringkat
- Manual Linux Práctico BasicoDokumen9 halamanManual Linux Práctico BasicoJosefath TorresBelum ada peringkat
- Piad 215 Formatoalumnotrabajofinal 1Dokumen14 halamanPiad 215 Formatoalumnotrabajofinal 1POL FFBelum ada peringkat
- Tema - 1 - Sistemas OperativosDokumen48 halamanTema - 1 - Sistemas OperativosNoé Pérez PérezBelum ada peringkat
- Monografia RosmeryQuispe FINALDokumen33 halamanMonografia RosmeryQuispe FINALMike WasouskiBelum ada peringkat
- Unidad 2-SODokumen28 halamanUnidad 2-SOEver RomeroBelum ada peringkat
- NDG Linux Unhatched PDFDokumen66 halamanNDG Linux Unhatched PDFelsa xhixhaBelum ada peringkat
- Gestion Sistema Hardware LinuxDokumen6 halamanGestion Sistema Hardware LinuxIsmaelBelum ada peringkat
- Programacion en AndroidDokumen43 halamanProgramacion en AndroidEliana Castillo Mariano50% (2)
- Ejercicio Examen 12Dokumen9 halamanEjercicio Examen 12james56Belum ada peringkat
- Comandos Basicos LINUXDokumen46 halamanComandos Basicos LINUXEnzo CeballosBelum ada peringkat
- Practicas Linux IIIDokumen20 halamanPracticas Linux IIISergio SanchezBelum ada peringkat
- Instalacion LXCDokumen4 halamanInstalacion LXCLuisBelum ada peringkat
- Apuntes Tic 1 y 2 BachDokumen31 halamanApuntes Tic 1 y 2 BachDanielTajeckiBelum ada peringkat
- Remasterizar ISO de Ubuntu: guía paso a pasoDokumen7 halamanRemasterizar ISO de Ubuntu: guía paso a pasoNolberto Zabala QuirozBelum ada peringkat
- Sistemas Operativos 1 Proyecto Socioformativo FinalDokumen33 halamanSistemas Operativos 1 Proyecto Socioformativo FinalRodrigo Leon canoBelum ada peringkat
- Guía 1 de Sistema OperativoDokumen10 halamanGuía 1 de Sistema Operativofreddy CorralesBelum ada peringkat
- Recuperación Final SORDokumen82 halamanRecuperación Final SORaaron mir trucoBelum ada peringkat
- LinuxDokumen20 halamanLinuxLuis Manuel Jara QuispeBelum ada peringkat
- Tarea No 2 - Windows Vs Linux Carlos PerezDokumen6 halamanTarea No 2 - Windows Vs Linux Carlos Perezpedro luisBelum ada peringkat
- UT 3 Actividad 6 - Examen de PruebaDokumen6 halamanUT 3 Actividad 6 - Examen de Pruebaandreicorneli06Belum ada peringkat
- Linux UnadDokumen11 halamanLinux UnadArmando QuinteroBelum ada peringkat
- Introduccion A La Arquitectura - AndroidDokumen7 halamanIntroduccion A La Arquitectura - AndroidSiete SieteBelum ada peringkat
- Investigacion Gnu LinuxDokumen11 halamanInvestigacion Gnu LinuxHumberto QuijadaBelum ada peringkat
- LIBRO DE SISTEMAS OPERATIVOS Parte Practica PDFDokumen129 halamanLIBRO DE SISTEMAS OPERATIVOS Parte Practica PDFEsteban Zavaleta ChumpitazBelum ada peringkat