Anda mungkin juga menyukai
- Simulative Calculation and Optimal Design of Scissor Lift MechanismDokumen4 halamanSimulative Calculation and Optimal Design of Scissor Lift MechanismLuis Alfonso González Vergara88% (8)
- Mdo GolinskiDokumen7 halamanMdo Golinskihmxa91Belum ada peringkat
- Weight Reduction of Planetary Gearbox Pedestal Using Finite Element AnalysisDokumen4 halamanWeight Reduction of Planetary Gearbox Pedestal Using Finite Element AnalysisPrabhakar PurushothamanBelum ada peringkat
- Tip Position Control of A Lightweight Flexible Manipulator Using A Fractional Order ControllerDokumen10 halamanTip Position Control of A Lightweight Flexible Manipulator Using A Fractional Order ControllerinfodotzBelum ada peringkat
- Gantry Crane SystemDokumen17 halamanGantry Crane SystemTarmizi KembaliBelum ada peringkat
- 06 Roma06Dokumen14 halaman06 Roma06Sankalp BhatiyaBelum ada peringkat
- 0000 Design by Optimization of An Axial-Flux Permanent-Magnet Synchronous MotorDokumen5 halaman0000 Design by Optimization of An Axial-Flux Permanent-Magnet Synchronous MotorAnonymous hWj4HKIDOF100% (1)
- Multicriterion Optimization of Multistage Gear Train TransmissionDokumen9 halamanMulticriterion Optimization of Multistage Gear Train TransmissionRiad RamadaniBelum ada peringkat
- Mathematical Modelling and Computer Simulations As An Aid To Gearbox DiagnosticsDokumen17 halamanMathematical Modelling and Computer Simulations As An Aid To Gearbox DiagnosticsJuan ManuelBelum ada peringkat
- Given:: M M RD Max SetDokumen2 halamanGiven:: M M RD Max Setjainam jainBelum ada peringkat
- Fracture Specimen Stree AnalysisDokumen15 halamanFracture Specimen Stree AnalysisGaurav PundirBelum ada peringkat
- 9 Ball and BeamDokumen15 halaman9 Ball and BeamshaheerdurraniBelum ada peringkat
- Stress Behaviour Improvement of Automobile Flywheel Under High Centrifugal ForcesDokumen6 halamanStress Behaviour Improvement of Automobile Flywheel Under High Centrifugal ForcesParag NaikBelum ada peringkat
- Friction and Rigid Body Identi®cation of Robot Dynamics: M. Grotjahn, M. Daemi, B. HeimannDokumen14 halamanFriction and Rigid Body Identi®cation of Robot Dynamics: M. Grotjahn, M. Daemi, B. HeimannPrakashBelum ada peringkat
- Aerodynamic Analysis and Design PracticeDokumen15 halamanAerodynamic Analysis and Design PracticeAdil LatifBelum ada peringkat
- 50400Spr15 HW 4Dokumen1 halaman50400Spr15 HW 4nawinnawmu1026Belum ada peringkat
- Design and Optimization of An XYZ Parallel Micromanipulator With Flexure HingesDokumen26 halamanDesign and Optimization of An XYZ Parallel Micromanipulator With Flexure HingesVijay SakhareBelum ada peringkat
- 2012 OPTIM Pop 10p TSFsDokumen10 halaman2012 OPTIM Pop 10p TSFsCharyBelum ada peringkat
- Functional Simulation of Harmonic Drive With S.M.A. Wave GeneratorDokumen5 halamanFunctional Simulation of Harmonic Drive With S.M.A. Wave GeneratorBizau ViorelBelum ada peringkat
- Mca 11 00193 PDFDokumen11 halamanMca 11 00193 PDFLuka NikitovicBelum ada peringkat
- Optimum Controller Design of An Overhead Crane: Kamal A.F. MoustafaDokumen6 halamanOptimum Controller Design of An Overhead Crane: Kamal A.F. MoustafaAliJunkoBelum ada peringkat
- Automotive SIMULIA Tech Brief 08 Iterative Design Evaluation FullDokumen4 halamanAutomotive SIMULIA Tech Brief 08 Iterative Design Evaluation Fullklomps_jrBelum ada peringkat
- 31 PDFDokumen24 halaman31 PDFRafael Severo da SilvaBelum ada peringkat
- Failure Analysis of Bolted Steel Flanges PDFDokumen6 halamanFailure Analysis of Bolted Steel Flanges PDFmoha100% (1)
- Belt AnalysisDokumen4 halamanBelt AnalysisMaheswaran MuthaiyanBelum ada peringkat
- Dynamic Analys Is of Belt Conveyor Based On AMESimDokumen2 halamanDynamic Analys Is of Belt Conveyor Based On AMESimAmit BhaduriBelum ada peringkat
- Multiobjective Optimal Design of Three-Phase Induction Motor Using Improved Evolution StrategyDokumen4 halamanMultiobjective Optimal Design of Three-Phase Induction Motor Using Improved Evolution StrategyEngr RbBelum ada peringkat
- The Optimal Design of Three Degree-of-Freedom Parallel Mechanisms For Machining ApplicationsDokumen9 halamanThe Optimal Design of Three Degree-of-Freedom Parallel Mechanisms For Machining ApplicationsBignaturalBelum ada peringkat
- Multi Spindle GearboxDokumen4 halamanMulti Spindle GearboxAkash Kumar DevBelum ada peringkat
- 473068.burul Kolonic Matusko Iz CD-ADokumen6 halaman473068.burul Kolonic Matusko Iz CD-Ajhephe46Belum ada peringkat
- Discrete Optimum Design of Cable-Stayed BridgesDokumen9 halamanDiscrete Optimum Design of Cable-Stayed BridgesspoorthissBelum ada peringkat
- Optimal Design of Axially Loaded RC ColumnsDokumen4 halamanOptimal Design of Axially Loaded RC ColumnsBONFRING100% (1)
- Bai - 2010 - Optimum Design of Spherical Parallel ManipulatorsDokumen12 halamanBai - 2010 - Optimum Design of Spherical Parallel ManipulatorsDurgesh Haribhau SalunkheBelum ada peringkat
- The Optimization Design of The Four-Bar Linkage Based On MATLABDokumen4 halamanThe Optimization Design of The Four-Bar Linkage Based On MATLABYosed Leonardo Santos GomezBelum ada peringkat
- Kong 2018Dokumen5 halamanKong 2018Syed Muhammad UsmanBelum ada peringkat
- Optimization of Weight of FlywheelDokumen11 halamanOptimization of Weight of FlywheelSube Singh InsanBelum ada peringkat
- Modeling Tutorial: Train SystemDokumen10 halamanModeling Tutorial: Train SystemzemanesantosBelum ada peringkat
- Mathematical Programming Methods For The Optimal Design of Turbine Blade ShapesDokumen14 halamanMathematical Programming Methods For The Optimal Design of Turbine Blade ShapesTarun ChoudharyBelum ada peringkat
- 11.1.1 Topology Optimization of An Automotive Control Arm Products: Abaqus/Standard Abaqus/CAEDokumen5 halaman11.1.1 Topology Optimization of An Automotive Control Arm Products: Abaqus/Standard Abaqus/CAEIrandokht NikshabaniBelum ada peringkat
- Detc2002/mech 34231Dokumen10 halamanDetc2002/mech 34231kaesarBelum ada peringkat
- Pro Mechanic ADokumen16 halamanPro Mechanic Aps202Belum ada peringkat
- Team 3 ME 558 Final ReportDokumen9 halamanTeam 3 ME 558 Final ReportingmecandresBelum ada peringkat
- A Study of Mesh Sensitivity For Crash Simulations - Comparison of Manually and Batch Meshed ModelsDokumen8 halamanA Study of Mesh Sensitivity For Crash Simulations - Comparison of Manually and Batch Meshed Modelscharan2kBelum ada peringkat
- Structural Optimization of Compactor Side Frame Using OptistructDokumen10 halamanStructural Optimization of Compactor Side Frame Using Optistructharshal161987Belum ada peringkat
- Novel Clamping Force Control For Electric Parking Brake SystemsDokumen6 halamanNovel Clamping Force Control For Electric Parking Brake SystemsAhmed AlostazBelum ada peringkat
- Fuzzy LogicDokumen6 halamanFuzzy Logicl_boy93Belum ada peringkat
- Bond Graph Modeling and Simulation of A FullDokumen6 halamanBond Graph Modeling and Simulation of A FullAnirban MitraBelum ada peringkat
- Dynamics of In-Line Six-Cylinder Diesel Engine With Rubber DamperDokumen10 halamanDynamics of In-Line Six-Cylinder Diesel Engine With Rubber DamperkspetsnazBelum ada peringkat
- Automotive SuspensionDokumen5 halamanAutomotive SuspensiondineshbiomedicalBelum ada peringkat
- Vibration Problems With Simscape3eDokumen32 halamanVibration Problems With Simscape3eAliOuchar100% (1)
- Structural Dynamics of The Chassis of A Light Trailer: Walter J. Paucar Casas Jun S. Ono FonsecaDokumen8 halamanStructural Dynamics of The Chassis of A Light Trailer: Walter J. Paucar Casas Jun S. Ono FonsecaSanjana ShettyBelum ada peringkat
- Dynamic Model Identification For Industrial Robots: Ngoc Dung Vuong, Marcelo H. Ang JRDokumen18 halamanDynamic Model Identification For Industrial Robots: Ngoc Dung Vuong, Marcelo H. Ang JRCosorAndrei-AlexandruBelum ada peringkat
- J.Stefanovic, Milovancevic PDFDokumen6 halamanJ.Stefanovic, Milovancevic PDFJelena Stefanovic MarinovicBelum ada peringkat
- Design of An Adaptive Headlights System For AutomobilesDokumen6 halamanDesign of An Adaptive Headlights System For Automobileskanchan boneBelum ada peringkat
- Modeling, Identification and Control of RobotsDari EverandModeling, Identification and Control of RobotsPenilaian: 5 dari 5 bintang5/5 (1)
- Planar Linkage Synthesis: A modern CAD based approachDari EverandPlanar Linkage Synthesis: A modern CAD based approachBelum ada peringkat
- MamDokumen14 halamanMamDeva RajBelum ada peringkat
- DE Lab Programs For AY - 22 - 23Dokumen1 halamanDE Lab Programs For AY - 22 - 23Deva RajBelum ada peringkat
- Toc Unit IvDokumen6 halamanToc Unit IvDeva RajBelum ada peringkat
- Faculty Publications 2020-21 and 2021 - 22Dokumen14 halamanFaculty Publications 2020-21 and 2021 - 22Deva RajBelum ada peringkat
- AutoCAD VIVADokumen6 halamanAutoCAD VIVADeva RajBelum ada peringkat
- Student Portal Access ProcedureDokumen2 halamanStudent Portal Access ProcedureDeva RajBelum ada peringkat
- Assignment 2Dokumen1 halamanAssignment 2Deva RajBelum ada peringkat
- c1 Az91e Sameer 2020Dokumen10 halamanc1 Az91e Sameer 2020Deva RajBelum ada peringkat
- ME First Year DetailsDokumen147 halamanME First Year DetailsDeva RajBelum ada peringkat
- Question Paper Set: AX Closed Book, Maximum Marks: 50, Time Allotted 60 MintsDokumen4 halamanQuestion Paper Set: AX Closed Book, Maximum Marks: 50, Time Allotted 60 MintsDeva RajBelum ada peringkat
- Ni (Al2o3) AZ91E-Mechanical Properties-Sameerkumar2017Dokumen13 halamanNi (Al2o3) AZ91E-Mechanical Properties-Sameerkumar2017Deva RajBelum ada peringkat
- VDC1-Anil Kumar-2018 - Vacuum Stir Casting For MG AlloysDokumen10 halamanVDC1-Anil Kumar-2018 - Vacuum Stir Casting For MG AlloysDeva RajBelum ada peringkat
- Szalva-Orbulov2020 Article InfluenceOfVacuumSupportOnTheFDokumen11 halamanSzalva-Orbulov2020 Article InfluenceOfVacuumSupportOnTheFDeva RajBelum ada peringkat
- Magnesium and Its Alloys in Automotive Applications - A ReviewDokumen20 halamanMagnesium and Its Alloys in Automotive Applications - A ReviewDeva RajBelum ada peringkat
- S1-AZ91E+Al2O3-mechanical - Sameer SirDokumen8 halamanS1-AZ91E+Al2O3-mechanical - Sameer SirDeva RajBelum ada peringkat
- Open Educational ResourcesDokumen1 halamanOpen Educational ResourcesDeva RajBelum ada peringkat
- R.V.R & J.C. College of Engineering (A), Chowdavaram, Guntur Department of Mechanical EngineeringDokumen1 halamanR.V.R & J.C. College of Engineering (A), Chowdavaram, Guntur Department of Mechanical EngineeringDeva RajBelum ada peringkat
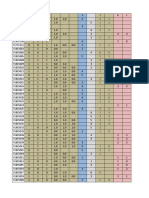
- K I P L - Pc2000 - Test Report: Displacement in MMDokumen4 halamanK I P L - Pc2000 - Test Report: Displacement in MMDeva RajBelum ada peringkat
- Anu Application PDFDokumen1 halamanAnu Application PDFDeva RajBelum ada peringkat
- Flyer IIT Roorkee WorkshopDokumen1 halamanFlyer IIT Roorkee WorkshopDeva RajBelum ada peringkat