Anda mungkin juga menyukai
- TD 4 (Ex & Sol)Dokumen18 halamanTD 4 (Ex & Sol)aymen sayoud50% (2)
- Exercices Systèmes ÉchantillonnésDokumen2 halamanExercices Systèmes ÉchantillonnésAsmaa Alaoui100% (3)
- M1 ASE Ident1 0405Dokumen4 halamanM1 ASE Ident1 0405ladabd2100% (1)
- Théorie et conception des filtres analogiques, 2e édition: Avec MatlabDari EverandThéorie et conception des filtres analogiques, 2e édition: Avec MatlabBelum ada peringkat
- Représentation D'état - EhtpDokumen94 halamanReprésentation D'état - EhtpAbiadiBelum ada peringkat
- TD 8 (Ex & Sol)Dokumen6 halamanTD 8 (Ex & Sol)aymen sayoudBelum ada peringkat
- TD Asservissement m1 Spi-GmaDokumen48 halamanTD Asservissement m1 Spi-Gmamechernene_aek90370% (1)
- COUR Représentation (État 2011Dokumen233 halamanCOUR Représentation (État 2011NaoufalBella-ElHamouyi100% (1)
- Representation D'etatDokumen18 halamanRepresentation D'etatbutterfly_kawtarBelum ada peringkat
- Chapitre2 Fonction de Transfert Et Asservissement Echantillonne-2020Dokumen12 halamanChapitre2 Fonction de Transfert Et Asservissement Echantillonne-2020I C H I G OBelum ada peringkat
- 2019-2020 Représentation D'état Échantillonnée Étudiant 1-2Dokumen17 halaman2019-2020 Représentation D'état Échantillonnée Étudiant 1-2benfatahBelum ada peringkat
- TD3 TZ FT CorrigéDokumen6 halamanTD3 TZ FT CorrigéSàmi Bm50% (2)
- Initiation À MATLAB: 1. Généralités 1.1. Accès À MatlabDokumen14 halamanInitiation À MATLAB: 1. Généralités 1.1. Accès À MatlabIguejdi LahcenBelum ada peringkat
- TD 1 Asservissement & RégulationDokumen1 halamanTD 1 Asservissement & RégulationfkjfhjtBelum ada peringkat
- 4 Fonction de TransfertDokumen18 halaman4 Fonction de TransfertAna SmaalBelum ada peringkat
- TD1 (Ex & Sol)Dokumen18 halamanTD1 (Ex & Sol)Younes Raache75% (4)
- AsservissementDokumen9 halamanAsservissementdibelghaba08100% (1)
- TD Correction PID AnalogiqueDokumen13 halamanTD Correction PID AnalogiqueChristian DinhoBelum ada peringkat
- TD CNDokumen25 halamanTD CNHasnae Segaoui100% (1)
- T.D. Automatique N 1 - Corrige PDFDokumen7 halamanT.D. Automatique N 1 - Corrige PDFYassine BridiBelum ada peringkat
- 6 - Correction Des Systèmes AsservisDokumen32 halaman6 - Correction Des Systèmes AsservisKatia MuslimaBelum ada peringkat
- 5 Commandabilité Retour D'étatDokumen6 halaman5 Commandabilité Retour D'étatNabil SaidaniBelum ada peringkat
- Exercices AAV v2Dokumen8 halamanExercices AAV v2Yassinox kamal50% (2)
- Examen Commande Optimale 2020-2021Dokumen1 halamanExamen Commande Optimale 2020-2021zakaria zezezzeBelum ada peringkat
- 1a Automatique Tds OldDokumen59 halaman1a Automatique Tds OldredaBelum ada peringkat
- Document Réponse TP2 PID - Num 2022 - 2023Dokumen10 halamanDocument Réponse TP2 PID - Num 2022 - 2023Zerrouk AthmanBelum ada peringkat
- Résumé Labview1Dokumen6 halamanRésumé Labview1FyggBelum ada peringkat
- Representation D'etat Des Systemes Lineaires A Temps DiscretDokumen16 halamanRepresentation D'etat Des Systemes Lineaires A Temps Discretboukmes8235Belum ada peringkat
- Automatique Avancée Commande Non-Linéaire P1: Pré-Requis Et ObjectifsDokumen24 halamanAutomatique Avancée Commande Non-Linéaire P1: Pré-Requis Et ObjectifsMbaira LeilaBelum ada peringkat
- Solution TD2 Systèmes Asservis ÉchantillonnésDokumen3 halamanSolution TD2 Systèmes Asservis Échantillonnéssami BoumendjelBelum ada peringkat
- Automatique AvanceeDokumen9 halamanAutomatique AvanceeimadBelum ada peringkat
- Examen Automatique1A 2016 Plus CorrectionDokumen19 halamanExamen Automatique1A 2016 Plus Correctionhalim otmaneBelum ada peringkat
- Commande Optimal eDokumen18 halamanCommande Optimal eramiyaminBelum ada peringkat
- Commande Retour EtatDokumen36 halamanCommande Retour EtatAdel MakhboucheBelum ada peringkat
- Chap 3Dokumen31 halamanChap 3أبو كعب علاء الدينBelum ada peringkat
- 4-Analyse Frequentielle Des Systemes LineairesDokumen14 halaman4-Analyse Frequentielle Des Systemes LineairesBouallegue Mounir100% (2)
- TD Atomatique Avancee 2021Dokumen20 halamanTD Atomatique Avancee 2021souhil berrahalBelum ada peringkat
- Polycopie Du TP LGE604-2012-BFDokumen12 halamanPolycopie Du TP LGE604-2012-BFIlyes Iberraken100% (2)
- TP AsservissementDokumen9 halamanTP Asservissementghellai younesBelum ada peringkat
- Td2 Master SanDokumen3 halamanTd2 Master SanMahrez DerdoumBelum ada peringkat
- TP Masters Mmss 2018 2019Dokumen14 halamanTP Masters Mmss 2018 2019Sòumia ElBelum ada peringkat
- TPautomatique TIMQ2018Dokumen16 halamanTPautomatique TIMQ2018fatima azalmadBelum ada peringkat
- Série Rég GM - GIDokumen5 halamanSérie Rég GM - GINisrine DaoukiBelum ada peringkat
- Correction td3Dokumen5 halamanCorrection td3GxfhjjBelum ada peringkat
- Automatique LiniéaireDokumen99 halamanAutomatique Liniéaireatoha007Belum ada peringkat
- Poly TD-Regul NumDokumen12 halamanPoly TD-Regul NumIslam BensediraBelum ada peringkat
- TD 2 - Asservissement-Energ2-2020Dokumen5 halamanTD 2 - Asservissement-Energ2-2020Chayeb HamzaBelum ada peringkat
- Sae Cours Bokovi PDFDokumen74 halamanSae Cours Bokovi PDFPALOUKI100% (2)
- Cours 02 TransformationDokumen4 halamanCours 02 TransformationAuzlem FaouziBelum ada peringkat
- Representation 2 EtatDokumen8 halamanRepresentation 2 EtatimadBelum ada peringkat
- td3 Version1Dokumen3 halamantd3 Version1SaadElHafidiBelum ada peringkat
- 2020 - 2021 - TP1 - SEER - 2 & GECSI-2 - Commande Par Retour d'État+Commande Optimale D'un MCCDokumen2 halaman2020 - 2021 - TP1 - SEER - 2 & GECSI-2 - Commande Par Retour d'État+Commande Optimale D'un MCCimad el-ghayouryBelum ada peringkat
- Fascicule de Travaux Pratiques PDFDokumen62 halamanFascicule de Travaux Pratiques PDFLEBONGO100% (1)
- Exercices d'optique et d'électromagnétismeDari EverandExercices d'optique et d'électromagnétismePenilaian: 5 dari 5 bintang5/5 (1)
- Fiabilité, maintenance prédictive et vibration des machinesDari EverandFiabilité, maintenance prédictive et vibration des machinesBelum ada peringkat
- Info ConversionDokumen3 halamanInfo ConversionIkram IkramBelum ada peringkat
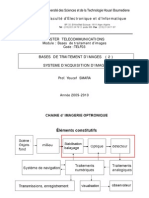
- Base de Traitement D'image 2Dokumen36 halamanBase de Traitement D'image 2Ikram IkramBelum ada peringkat
- Base de Traitement D'image 1Dokumen34 halamanBase de Traitement D'image 1Ikram Ikram50% (2)
- PabxDokumen5 halamanPabxFabien De la Vega100% (1)
- Ele106 Cours+tp Vol1Dokumen196 halamanEle106 Cours+tp Vol1Ikram Ikram100% (2)
- Cours Asservissemnt 602 FALEKDokumen74 halamanCours Asservissemnt 602 FALEKIkram Ikram50% (2)
- Exam en 2009Dokumen4 halamanExam en 2009Ikram IkramBelum ada peringkat
- Cours VHDL Tres ImportantDokumen196 halamanCours VHDL Tres Importantbbaaziz2005100% (1)
- AbelVhdl IntetessantDokumen69 halamanAbelVhdl IntetessantnoussaierBelum ada peringkat
- 5 Presentation de MultisimDokumen6 halaman5 Presentation de MultisimIkram IkramBelum ada peringkat
- Corriger Du TD Asservissement n10Dokumen2 halamanCorriger Du TD Asservissement n10Ikram Ikram100% (2)
- CFSE InvitDokumen27 halamanCFSE InvitIkram IkramBelum ada peringkat
- Réalisation D'un Dispositif Micro OndeDokumen4 halamanRéalisation D'un Dispositif Micro OndeIkram IkramBelum ada peringkat
- Mesures de Dis Posit Ifs Micro On Des Passifs Et ActifsDokumen1 halamanMesures de Dis Posit Ifs Micro On Des Passifs Et ActifsIkram IkramBelum ada peringkat
- Cours de Systemes AsservisDokumen82 halamanCours de Systemes Asserviselectroblida86% (7)
- Exercices Moteur Asynchrone PDFDokumen22 halamanExercices Moteur Asynchrone PDFalaeddineBelum ada peringkat
- 6 Synthèse Juin 2008Dokumen10 halaman6 Synthèse Juin 2008Ikram IkramBelum ada peringkat
- 4624219Dokumen80 halaman4624219Angello387Belum ada peringkat
- 4 Initiation À Sprint-LayoutDokumen13 halaman4 Initiation À Sprint-LayoutIkram IkramBelum ada peringkat
- 1 Production D'electricitéDokumen12 halaman1 Production D'electricitéIkram Ikram100% (1)
- 2 Capteurs Dans Un Lave LingeDokumen11 halaman2 Capteurs Dans Un Lave LingeIkram Ikram100% (2)
- 2 Mesure T-NiveauDokumen8 halaman2 Mesure T-NiveauIkram IkramBelum ada peringkat
- Electronique Et Loisirs 039 - 2002 - AoutDokumen80 halamanElectronique Et Loisirs 039 - 2002 - AoutIkram Ikram50% (2)
- 1 Composants ElectroniquesDokumen7 halaman1 Composants ElectroniquesIkram IkramBelum ada peringkat
- Electronique Et Loisirs 038 - 2002 - JuilletDokumen80 halamanElectronique Et Loisirs 038 - 2002 - JuilletIkram Ikram100% (1)
- Electronique Et Loisirs 035 - 2002 - AvrilDokumen96 halamanElectronique Et Loisirs 035 - 2002 - AvrilIkram Ikram100% (1)
- Sa1-Systemes Asservis - NotionsDokumen4 halamanSa1-Systemes Asservis - NotionsMohammed ChaabateBelum ada peringkat
- Electronique Et Loisirs 056 - 2004 - JanvierDokumen80 halamanElectronique Et Loisirs 056 - 2004 - JanvierIkram IkramBelum ada peringkat
- Electronique Et Loisirs 054 - 2003 - NovembreDokumen80 halamanElectronique Et Loisirs 054 - 2003 - NovembreIkram Ikram100% (1)
- Electronique Et Loisirs 055 - 2003 - DecembreDokumen80 halamanElectronique Et Loisirs 055 - 2003 - DecembreIkram IkramBelum ada peringkat
- La Preuve Électronique PDFDokumen5 halamanLa Preuve Électronique PDFBernard BASSEBelum ada peringkat
- Hyg HADDAD SAMIA - pdf6351101127676011697Dokumen93 halamanHyg HADDAD SAMIA - pdf6351101127676011697Oualid LaribiBelum ada peringkat
- Res CelDokumen2 halamanRes Celasma nsiriBelum ada peringkat
- Resumé Linux CommandesDokumen3 halamanResumé Linux CommandesAnonymous jE0QwgTBelum ada peringkat
- TEEO, DR NEBIEDokumen38 halamanTEEO, DR NEBIEAbdoul Karim Lankoandé100% (2)
- Elektor n°473 2018-09-10Dokumen116 halamanElektor n°473 2018-09-10alex bousquetBelum ada peringkat
- Notre Univers Est-Il Une Simulation InformatiqueDokumen13 halamanNotre Univers Est-Il Une Simulation Informatiquejpl2504Belum ada peringkat
- Activites Mise Au Travail Rapide CE1Dokumen4 halamanActivites Mise Au Travail Rapide CE1Azhari YounessBelum ada peringkat
- Guide D'utilisation de La E-Disa Version Aout 2014Dokumen28 halamanGuide D'utilisation de La E-Disa Version Aout 2014Gondwanais Lamda0% (1)
- Algorithme de MinimisationDokumen4 halamanAlgorithme de Minimisationchaima allaguiBelum ada peringkat
- St02 2016 Gaude Marie-Sophie MimDokumen44 halamanSt02 2016 Gaude Marie-Sophie MimAlma Malak100% (1)
- Vierge SignalDokumen34 halamanVierge SignalPascalDelvauxBelum ada peringkat
- Sarlam ConvergenceDokumen32 halamanSarlam ConvergenceABELWALIDBelum ada peringkat
- Cours de SimulationDokumen56 halamanCours de SimulationMarttyMcFly100% (2)
- Examen 2019 - 1Dokumen4 halamanExamen 2019 - 1PFEBelum ada peringkat
- Canal de Propagation Radio ElectriqueDokumen395 halamanCanal de Propagation Radio ElectriqueGervaisKamga100% (1)
- TD 4Dokumen1 halamanTD 4beckerrolandhBelum ada peringkat
- RIDODokumen100 halamanRIDOmiguelangelngc5Belum ada peringkat
- Cahier de Réseau-Chapitre 1 - Généralités Sur Les Réseaux InformatiquesDokumen15 halamanCahier de Réseau-Chapitre 1 - Généralités Sur Les Réseaux InformatiquesCyriaque NascimentoBelum ada peringkat
- tp4 rdm6Dokumen7 halamantp4 rdm6ABDESSAMAD EZZALMADIBelum ada peringkat
- 0021863665Dokumen2 halaman0021863665PuiulBelum ada peringkat
- D50317FR20 38 FDokumen5 halamanD50317FR20 38 FFary NdongBelum ada peringkat
- Vademecum Logistique AchatDokumen9 halamanVademecum Logistique AchatOumaima AmgharBelum ada peringkat
- Qualité Des Réseaux Électriques Et Efficacité ÉnergétiqueDokumen206 halamanQualité Des Réseaux Électriques Et Efficacité ÉnergétiqueVirginie AufrayBelum ada peringkat
- CFR MANUEL-SIMPLIFIE CHILLER UCH FR Rel1.0Dokumen30 halamanCFR MANUEL-SIMPLIFIE CHILLER UCH FR Rel1.0Pascal NicolletBelum ada peringkat
- Serie DexercicesDokumen4 halamanSerie DexerciceswalidBelum ada peringkat
- CV Mohamed OmriDokumen1 halamanCV Mohamed OmriAli OmriBelum ada peringkat
- Trigonométrique AcDokumen2 halamanTrigonométrique AcAbdelilah El GmairiBelum ada peringkat
- Diagrame Faw Xiali 1.1 by MR Djalal 2021Dokumen3 halamanDiagrame Faw Xiali 1.1 by MR Djalal 2021Cherifi Mouffaq100% (2)
- Pfe GM 0142Dokumen190 halamanPfe GM 0142Erraji HichamBelum ada peringkat