Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
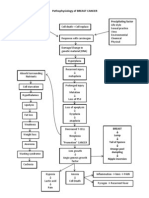
- Pathophysiology of BREAST CANCERDokumen1 halamanPathophysiology of BREAST CANCERAlinor Abubacar100% (6)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Chapter 1 - INTRODUCTION TO ANATOMY AND PHYSIOLOGY PDFDokumen121 halamanChapter 1 - INTRODUCTION TO ANATOMY AND PHYSIOLOGY PDFKorina Marawis67% (3)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- MEDICAL SURGICAL NURSING REVIEWDokumen7 halamanMEDICAL SURGICAL NURSING REVIEWeloisa mae gementizaBelum ada peringkat
- MKFP Mat-Xs Clinical 16052012 enDokumen8 halamanMKFP Mat-Xs Clinical 16052012 ensuharyantoBelum ada peringkat
- Cardiovascular Physiology For University Students: S. I. Ogungbemi Department of Physiology University of LagosDokumen136 halamanCardiovascular Physiology For University Students: S. I. Ogungbemi Department of Physiology University of LagosTeeBelum ada peringkat
- Endocrine - FRCEM SuccessDokumen110 halamanEndocrine - FRCEM SuccessskBelum ada peringkat
- 4 - Subphylum UrochordataDokumen12 halaman4 - Subphylum UrochordataStudent 365Belum ada peringkat
- Infinity Urea Liquid Reagent ENDokumen2 halamanInfinity Urea Liquid Reagent ENKouame FrancisBelum ada peringkat
- Clinical Manual of Otolaryngology Clear ScanDokumen283 halamanClinical Manual of Otolaryngology Clear ScanAyman Yakout100% (4)
- ADokumen2 halamanAイ ロBelum ada peringkat
- Traumatic Brain Injury PresentationDokumen14 halamanTraumatic Brain Injury Presentationapi-413607178Belum ada peringkat
- G9 Science Q1 - Week 1-2 Respiratory-Circulatory-SystemDokumen34 halamanG9 Science Q1 - Week 1-2 Respiratory-Circulatory-SystemSandra Lee LigsaBelum ada peringkat
- Test Bank For Mechanical Ventilation 7th Edition J M CairoDokumen11 halamanTest Bank For Mechanical Ventilation 7th Edition J M CairoJohnCampbellyacer100% (27)
- Sexual Precocity PDFDokumen5 halamanSexual Precocity PDFmist73Belum ada peringkat
- NKC Fast Facts - Poop Chart - 5 2017 PDFDokumen1 halamanNKC Fast Facts - Poop Chart - 5 2017 PDFFaniaBelum ada peringkat
- Skeletal Muscle Classification and StructureDokumen43 halamanSkeletal Muscle Classification and StructureHusnain WattoBelum ada peringkat
- 08 DN 005 BA Int OkDokumen64 halaman08 DN 005 BA Int OkvbogachevBelum ada peringkat
- ECG Localization of Culprit Artery in Acute Myocardial InfarctionDokumen104 halamanECG Localization of Culprit Artery in Acute Myocardial Infarctionginaul100% (1)
- Ithomiini 2Dokumen26 halamanIthomiini 2Roberta MirandaBelum ada peringkat
- Abnormal heart sounds explainedDokumen3 halamanAbnormal heart sounds explainedmuhammad azizulhakimBelum ada peringkat
- Nontoxic Nodular GoiterDokumen7 halamanNontoxic Nodular GoiterKayshey Christine ChuaBelum ada peringkat
- Drug 1Dokumen2 halamanDrug 1Nicholas TagleBelum ada peringkat
- 42fundus AngiographyDokumen28 halaman42fundus AngiographyHitesh SharmaBelum ada peringkat
- Unit 4 Knowledge Check 1Dokumen70 halamanUnit 4 Knowledge Check 1SH SBelum ada peringkat
- Excerpt From "Presence" by Amy CuddyDokumen10 halamanExcerpt From "Presence" by Amy CuddyOnPointRadioBelum ada peringkat
- Pancreas - Pathological Practice and Research - K. Suda (Karger, 2007) WW PDFDokumen329 halamanPancreas - Pathological Practice and Research - K. Suda (Karger, 2007) WW PDFIonut-Stefan CiobaneluBelum ada peringkat
- Types of Plant HormonesDokumen6 halamanTypes of Plant HormonesKarren ReyesBelum ada peringkat
- Neuromuscular Junction Blocking AgentsDokumen9 halamanNeuromuscular Junction Blocking AgentsSyvBelum ada peringkat
- HemophiliaDokumen27 halamanHemophiliaDorothy Pearl Loyola Palabrica100% (1)
- Hypertension ControlDokumen7 halamanHypertension ControlXyla CullenBelum ada peringkat