Bab III Pengumpulan Dan Pengolahan Data
Diunggah oleh
Agustian ChuagestuHak Cipta
Format Tersedia
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
Format Tersedia
Bab III Pengumpulan Dan Pengolahan Data
Diunggah oleh
Agustian ChuagestuHak Cipta:
Format Tersedia
BAB III
PENGUMPULAN DAN PENGOLAHAN DATA
Pada bab ini akan dibahas mengenai pengumpulan dan pengolahan
data. Adapun penjelasannya dibagi menjadi tiga sub-bab yaitu data stasiun kerja
awal, bagan analisis, dan perancangan perbaikan stasiun kerja.
III.1
Data Stasiun Kerja Awal
Pada sub-bab III.1 ini akan dibahas mengenai data stasiun kerja awal.
Dalam stasiun kerja awal untuk merakit baby vise dengan tipe A terdapat 3 kotak
penyimpanan komponen-komponen baby vise. Penjelasan lebih lanjut dapat
dilihat di gambar III.1.
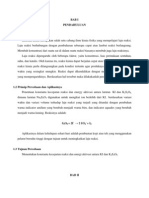
Gambar III.1 Layout Stasiun Kerja Sebelum Perbaikan (dalam satuan : mm)
Pada kotak nomor 1 terdapat mur besar, mur kecil, dan bantalan gerak.
Kotak nomor 2 berisi tangkai panjang, tangkai pendek, dan sekrup. Kotak nomor
3 berisi rangkaian dasar dan rahang gerak. Kemudian kotak nomor 4 adalah
penyimpanan baby vise yang telah jadi. Sedangkan operator berada pada nomor
5. Skala sebenarnya dapat dilihat di gambar III.1 yang dimuat dalam satuan
milimeter.
III.2
Bagan Analisis
III-1
____
BAB III PENGUMPULAN DAN
PENGOLAHAN DATA
Pada sub-bab III.2 akan dipaparkan bagan analisis sebelum dan
sesudah perbaikan. Bagan analisis sebelum perbaikan dibuat berdasarkan salah
satu perakitan dari 40 menit video perakitan yang telah dilakukan di laboratorium
PSK&E. Berikut adalah bagan analisis sebelum perbaikan:
Tabel III.1 Bagan Analisis Sebelum Perbaikan
BAGAN ANALISIS SEBELUM PERBAIKAN
Tanggal : 11 Februari 2016
Operasi: Merakit baby vise
Analis : Kelompok 21
Lembar ke -1 dari 7 lembar
Keterangan Tangan Kiri
LH
TMU
RH
Keterangan Tangan Kanan
1. Memasangkan tangkai panjang pada rangkaian dasar
Menjangkau rangkaian
dasar yang berjarak 54
R22C
21,2
cm dari operator
Memegang rangkaian
G1A
2
dasar
Membawa rangkaian
dasar ke dekat operator
M22C
23,8
(54 cm)
Menjangkau tangkai
Memegang rangkaian
17
R16C
panjang yang berjarak 39
dasar
cm dari operator
Memegang rangkaian
Memegang tangkai
2
G1A
dasar
panjang
Memegang rangkaian
Membawa tangkai panjang
18,7
M16C
dasar
ke dekat operator (39 cm)
Memposisikan tangkai
Memegang rangkaian
16
P1NSD
panjang pada rangkaian
dasar
dasar
Melepaskan rangkaian
dasar dan tangkai
Rl1
2
panjang
No.
Keterangan
Elemen
Gerakan
Memasangkan
tangkai
panjang pada
rangkaian
dasar
TM
Faktor
Konversi
0.036(detik)
Kelonggaran
16%
Waktu
(detik)
Jumlah
ulang
per
siklus
Total
waktu
(detik)
102,7
3,6972
0,591552
4,289
4,289
Total
4,289
(lanjut)
Tabel III.1 Bagan Analisis Sebelum Perbaikan (lanjutan)
III-2
____
BAB III PENGUMPULAN DAN
PENGOLAHAN DATA
BAGAN ANALISIS SEBELUM PERBAIKAN
Tanggal : 11 Februari 2016
Operasi: Merakit baby vise
Analis : Kelompok 21
Keterangan Tangan
Kiri
Lembar ke -2 dari 7 lembar
LH
TMU
RH
Keterangan Tangan Kanan
2. Memasang tangkai pendek pada sekrup
4,3
ET15
Eye travel
7,3
EF
Eye focus
Menjangkau sekrup yang
17
R16C
berjarak 39 cm dari operator
2
G1A
Memegang sekrup
Memindahkan sekrup ke
18,7
M16C
tangan kiri (39 cm)
Memegang sekrup
G1A
2
Rl1
Melepaskan sekrup
Menjangkau tangkai pendek
Memegang sekrup
17
R16C
yang berjarak 39 cm dari
operator
Memegang sekrup
2
G1A
Memegang tangkai pendek
Memposisikan tangkai
Memegang sekrup
18,7
M16C
pendek ke sekrup
Melepaskan sekrup dan
Rl1
2
tangkai pendek
No
.
Keterangan
Elemen
Gerakan
Memasang
tangkai
pendek pada
sekrup
TM
Faktor
Konversi
0.036(detik)
Kelonggaran
16%
Waktu
(detik)
Jumlah
ulang
per
siklus
Total
waktu
(detik)
91
3,276
0,524
3,8
3,8
Total
8,089
(lanjut)
Tabel III.1 Bagan Analisis Sebelum Perbaikan (lanjutan)
III-3
____
BAB III PENGUMPULAN DAN
PENGOLAHAN DATA
BAGAN ANALISIS SEBELUM PERBAIKAN
Tanggal : 11 Februari 2016
Operasi: Merakit baby vise
Analis : Kelompok 21
Lembar ke -3 dari 7 lembar
Keterangan Tangan Kiri
LH
TMU
RH
Keterangan Tangan Kanan
3. Memasang mur besar pada tangkai panjang
Eye travel dengan dengan T
5,2
ET5,5/16
= 5,5" dan D = 16"
7,3
EF
Eye focus
Menjangkau mur besar yang
17
R16C
berjarak 41 cm dari operator
2
G1A
Memegang mur besar
Memindahkan mur besar ke
18,7
M16C
dekat operator (41 cm)
Menjangkau rangkaian
dasar dan tangkai
R2A
4
Memegang mur besar
panjang
Memegang rangkaian
dasar dan tangkai
G1A
2
Memegang mur besar
panjang
Memegang rangkaian
Memposisikan mur besar ke
16
P1NSD
dasar
tangkai panjang
Memegang rangkaian
Memutar mur besar sebesar
74
T180M
dasar
180* sebanyak 5 kali
Melepaskan rangkaian
dasar dan tangkai
Rl1
2
panjang
No
.
Keterangan
Elemen
Gerakan
Memasang
mur besar
pada tangkai
panjang
TM
Faktor
Konversi
0.036(detik)
Kelonggaran
16%
Waktu
(detik)
Jumlah
ulang
per
siklus
Total
waktu
(detik)
148,2
5,335
0,854
6,189
6,189
Total
14,278
(lanjut)
Tabel III.1 Bagan Analisis Sebelum Perbaikan (lanjutan)
III-4
____
BAB III PENGUMPULAN DAN
PENGOLAHAN DATA
BAGAN ANALISIS SEBELUM PERBAIKAN
Tanggal : 11 Februari 2016
Operasi: Merakit baby vise
Analis : Kelompok 21
Lembar ke -4 dari 7 lembar
Keterangan Tangan Kiri
LH
TMU
RH
Keterangan Tangan Kanan
4. Memasang mur kecil pada tangkai pendek
Menjangkau sekrup
dan tangkai pendek
yang berjarak 5 cm
dari operator
Memegang sekrup
dan tangkai pendek
5,2
ET5,5/16
7,3
EF
17
R16C
G1A
18,7
M16C
R2A
G1A
Memegang mur
kecil
Memegang sekrup
dan tangkai pendek
16
P1NSD
Memegang sekrup
dan tangkai pendek
74
T180M
Melepaskan sekrup
dan tangkai kecil
No
.
Keterangan
Elemen
Gerakan
Memasang
mur kecil
pada tangkai
pendek
Rl1
Eye travel dengan
dengan T = 5,5"
dan D = 16"
Eye focus
Menjangkau mur
kecil yang
berjarak 41 cm
dari operator
Memegang mur
kecil
Memindahkan
mur kecil ke dekat
operator (41 cm)
Memegang mur
kecil
Memposisikan
mur kecil ke
tangkai pendek
Memutar mur
kecil sebesar
180* sebanyak 5
kali
TM
Faktor
Konversi
0.036(detik)
Kelonggaran
16%
148,2
5,335
0,854
Waktu
(detik)
Jumla
h
ulang
per
siklus
Total
waktu
(detik)
6,189
6,189
Total
20,467
(lanjut)
Tabel III.1 Bagan Analisis Sebelum Perbaikan (lanjutan)
BAGAN ANALISIS SEBELUM PERBAIKAN
III-5
____
BAB III PENGUMPULAN DAN
PENGOLAHAN DATA
Tanggal : 11 Februari 2016
Operasi: Merakit baby vise
Analis : Kelompok 21
Lembar ke -5 dari 7 lembar
Keterangan Tangan Kiri
LH
TMU
RH
Keterangan Tangan Kanan
5. Memasang rahang gerak pada rangkaian dasar
21,9
Menjangkau rahang gerak
yang berjarak 54 cm dari
operator
Memegang rahang gerak
Memindahkan rahang
gerak ke tangan kanan (54
cm)
Melepaskan rahang gerak
Menjangkau rangkaian
dasar yang berjarak 5 cm
dari operator
Memegang rangkaian
dasar
Memposisikan rangkaian
dasar ke rahang gerak
Memegang rangkaian
dasar
ET30,7/21,3
Eye travel dengan dengan T
= 30,7" dan D = 21,3"
R22C
21,2
G1A
M22A
20,8
Rl1
R2A
Memegang rahang gerak
G1A
Memegang rahang gerak
P1NSD
16
Memegang rahang gerak
G1A
Memegang rahang gerak
Rl1
Melepaskan rahang gerak
Memegang rangkaian
dasar
17
R16C
Menjangkau tangkai
panjang yang berjarak 39
cm dari operator
Memegang rangkaian
dasar
G1A
Memegang tangkai panjang
Memegang rangkaian
dasar
710,4
48*T180M
Memegang rangkaian
dasar
Rl1
No.
Keterangan
Elemen
Gerakan
Memasang
rahang gerak
pada
rangkaian
dasar
Memutar tangkai panjang
sejauh 360* sebanyak 24
kali
Melepaskan tangkai panjang
TM
Faktor
Konversi
0.036(detik)
Kelonggaran
16%
Waktu
(detik)
Jumlah
ulang
per
siklus
Total
waktu
(detik)
823,3
29,639
4,742
34,381
34,381
Total
54,848
(lanjut)
Tabel III.1 Bagan Analisis Sebelum Perbaikan (lanjutan)
BAGAN ANALISIS SEBELUM PERBAIKAN
Tanggal : 11 Februari 2016
III-6
____
BAB III PENGUMPULAN DAN
PENGOLAHAN DATA
Operasi: Merakit baby vise
Analis : Kelompok 21
Lembar ke -6 dari 7 lembar
Keterangan Tangan Kiri
LH
TMU
RH
Keterangan Tangan Kanan
6. Memasang sekrup pada rangkaian dasar
Memegang rangkaian
dasar
Memegang rangkaian
dasar
Memegang rangkaian
dasar
Memegang rangkaian
dasar
Memegang rangkaian
dasar
No
.
Keterangan
Elemen
Gerakan
Memasang
sekrup pada
rangkaian
dasar
17
R16C
G1A
16
P1NSD
296
20*T180
M
Rl1
Menjangkau sekrup
Memegang sekrup
Memposisikan sekrup
pada rangkaian dasar
Memutarkan sekrup
sebesar 360* sebanyak
10 kali
Melepaskan sekrup
TM
Faktor
Konversi
0.036(detik)
Kelonggaran
16%
Waktu
(detik)
Jumlah
ulang
per
siklus
Total
waktu
(detik)
333
11,988
1,918
13,906
13,906
Total
68,754
(lanjut)
Tabel III.1 Bagan Analisis Sebelum Perbaikan (lanjutan)
BAGAN ANALISIS SEBELUM PERBAIKAN
III-7
____
BAB III PENGUMPULAN DAN
PENGOLAHAN DATA
Tanggal : 11 Februari 2016
Operasi: Merakit baby vise
Analis : Kelompok 21
Lembar ke -7 dari 7 lembar
Keterangan Tangan Kiri
LH
TMU
RH
Keterangan Tangan Kanan
7. Memasang bantalan gerak pada sekrup
Memegang rangkaian dasar
5,2
ET5,5/16
Memegang rangkaian dasar
7,3
EF
Memegang rangkaian dasar
17
R16C
Memegang rangkaian dasar
G1A
Memegang rangkaian dasar
18,7
M16C
Memegang rangkaian dasar
16
P1NSD
Memegang rangkaian dasar
44,4
3*T180M
Memegang rangkaian dasar
Rl1
Eye travel dengan dengan
T = 5,5" dan D = 16"
Eye focus
Menjangkau bantalan
gerak yang berjarak 41 cm
dari operator
Memegang bantalan gerak
Memindahkan bantalan
gerak ke dekat operator
(41 cm)
Memposisikan bantalan
gerak ke sekrup
Memutarkan bantalan
gerak sebesar 180*
sebanyak 3 kali
Melepaskan bantalan
gerak
8. Mengencangkan sekrup
Memegang rangkaian dasar
Melepaskan rangkaian dasar
No.
Keterangan
Elemen Gerakan
Memasang
bantalan gerak
pada sekrup
Mengencangkan
sekrup
Rl1
G1A
296
20*T180M
G1A
19,2
M20A
Rl1
Memegang tangkai pendek
Memutarkan tangkai
pendek sebesar 360*
sebanyak 10 kali
Memegang kembali
rangkaian dasar
Memindahkan baby vise ke
tempat produk
Melepaskan baby vise
TM
Faktor
Konversi
0.036(detik)
Kelonggaran
16%
Waktu
(detik)
Jumlah
ulang
per
siklus
Total
waktu
(detik)
112,6
4,054
0,649
4,702
4,702
321,
2
11,563
1,850
13,413
13,413
Total
III.3
86,869
Perancangan Perbaikan Stasiun Kerja
Pada sub-bab III.3 akan dibahas mengenai perancangan perbaikan
stasiun kerja. Setelah dibuat bagan analisis untuk perakitan sebelum perbaikan
didapati bahwa terdapat beberapa kekurangan dari stasiun kerja sebelum
III-8
____
BAB III PENGUMPULAN DAN
PENGOLAHAN DATA
perbaikan. Beberapa kekurangan itu di antaranya adalah kotak penyimpanan
komponen yang bercampur, urutan perakitan yang tidak kontinu, jarak kotak
penyimpanan yang terlalu juah dari operator.
Perancangan perbaikan stasiun kerja perlu dilakukan agar mendapatkan
output baby vise yang lebih meningkat. Adapun perancangan perbaikan yang
dilakukan adalah mengatur kembali layout tempat kerja, membuat tempat
penyimpanan
komponen
dengan
mengimplementasikan
prinsip
gravitasi,
mengubah urutan perakitan dan mengatur kembali posisi komponen-komponen
baby
vise
sesuai
dengan
urutan
perakitannya.
Penjelasan
mengenai
perancangan perbaikan akan dibahas lebih lanjut.
Gambar III.2 Layout Stasiun Kerja Setelah Perbaikan (dalam satuan : mm)
Pada kotak nomor 1 terdapat sekrup dan tangkai pendek. Kotak nomor
2 berisi rangkaian dasar dan mur kecil. Kotak nomor 3 berisi bantalan dan
tangkai panjang. Kemudian kotak nomor 4 adalah mur besar dan rahang gerak.
Sedangkan tempat penyimpanan baby vise yang telah dirakit berada pada nomor
5. Kemudian lambang X melambangkan operator. Skala sebenarnya dapat dilihat
di gambar III.2 yang dimuat dalam satuan milimeter.
III-9
____
BAB III PENGUMPULAN DAN
PENGOLAHAN DATA
Gambar III.3 Alat Bantu Kotak Penyimpanan (Gambar 3D dan 2D)
Kotak pada gambar III.3 memiliki dua tingkat tempat penyimpanan
komponen yang telah diimplementasikan prinsip gravitasi. Prinsip gravitasi
tersebut dapat membuat komponen yang disimpan di dalam kotak tetap berada
di bagian mulut kotak yang terdapat pada kedua tingkat. Kotak tersebut didesain
memiliki dua tingkat agar kotak tempat penyimpanan komponen tidak memakan
banyak tempat pada meja operator. Selain itu kotak ini juga dibuat agar
memungkinkan untuk memisahkan material sesuai dengan jenisnya.
Tabel III.2 Langkah Perakitan Perbaikan
1
2
3
4
5
6
7
8
Memasang tangkai pendek pada sekrup
Memasang mur kecil pada tangkai pendek
Memasang sekrup pada rangkaian dasar
Memasang bantalan pada sekrup
Memasang tangkai panjang pada rangkaian dasar
Mengencangkan sekrup
Memasang mur besar pada tangkai panjang
Memasang rahang gerak pada rangkaian dasar
Langkah perakitan diubah menjadi seperti pada tabel III.2 karena
langkah perakitan menjadi kontinu dan membuat operator menjadi lebih mudah
dalam merakit. Setelah diubah urutan kerja perakitannya diharapkan operator
menjadi lebih nyaman dan mudah dalam melakukan proses perakitan baby vise.
Setelah dilakukan perancangan perbaikan pada langkah-langkah kerja
perakitan baby vise, dibuatlah bagan analisis usulan untuk melihat perubahan
waktu yang terjadi. Berikut adalah bagan analisis setelah perbaikan:
III-10
____
BAB III PENGUMPULAN DAN
PENGOLAHAN DATA
Tabel III.3 Bagan Analisis Setelah Perbaikan
BAGAN ANALISIS SETELAH PERBAIKAN
Tanggal : 15 Februari 2016
Operasi : Merakit baby vise
Analis : Kelompok 21
Keterangan Tangan Kiri
Lembar ke - 1 dari 5 lembar
LH
TMU
RH
Keterangan Tangan Kanan
1. Memasang tangkai pendek pada sekrup
4,3
ET15
Eye travel
7,3
EF
Eye focus
Menjangkau sekrup yang
Menjangkau tangkai
berjarak 40 cm dari
R16A
11,4
R16A
pendek yang berjarak 40
operator
cm dari operator
Memegang sekrup
G1A
2
G1A
Memegang tangkai pendek
Memposisikan tangkai
Memegang sekrup
18,7
M16C
pendek ke sekrup
Melepaskan sekrup dan
2
RI1
tangkai pendek
2. Memasang mur kecil pada tangkai pendek
Eye travel dengan dengan
5,2
ET5,5/16
T = 5,5" dan D = 16"
7,3
EF
Eye focus
Menjangkau sekrup dan
Menjangkau mur kecil yang
tangkai kecil yang berjarak
R2A
17
R16C
berjarak 40 cm dari
5 cm dari operator
operator
Memegang sekrup dan
G1A
2
G1A
Memegang mur kecil
tangkai kecil
Memegang sekrup dan
Memindahkan mur kecil ke
18,7
M16C
tangkai kecil
dekat operator (40 cm)
Memegang sekrup dan
Memposisikan mur kecil ke
16
P1NSD
tangkai kecil
tangkai pendek
Memegang sekrup dan
Memutar mur kecil sebesar
74
T180M
tangkai kecil
180* sebanyak 5 kali
Melepaskan sekrup dan
RI1
2
tangkai kecil
Jumlah
Faktor
Total
Keterangan
Kelonggaran
Waktu
ulang
No,
TMU
Konversi
waktu
Elemen Gerakan
16%
(detik)
per
0.036(detik)
(detik)
siklus
Memasang tangkai
1
pendek pada
45,7
1,645
0,263
1,908
1
1,908
sekrup
Memasang mur
2
kecil pada tangkai
142,2
5,119
0,819
5,938
1
5,938
pendek
Total
7,846
(lanjut)
Tabel III.3 Bagan Analisis Setelah Perbaikan (lanjutan)
BAGAN ANALISIS SETELAH PERBAIKAN
Tanggal : 15 Februari 2016
Operasi : Merakit baby vise
Analis : Kelompok 21
Lembar ke - 2 dari 5 lembar
III-11
____
Keterangan Tangan
Kiri
BAB III PENGUMPULAN DAN
PENGOLAHAN DATA
LH
TMU
Keterangan Tangan
RH
Kanan
3. Memasang sekrup pada rangkaian dasar
Menjangkau sekrup
R16A
11,4
R16A
Memegang sekrup
G1A
G1A
18,7
M16C
Memegang sekrup
Memposisikan sekrup
pada rangkaian dasar
Memutarkan sekrup
sebesar 360*
sebanyak 10 kali
P1NSD
16
20*T180M
296
Memegang sekrup
Menjangkau rangkaian
dasar
Memegang rangkaian
dasar
Memindahkan rangkaian
dasar ke dekat operator
Memegang rangkaian
dasar
Memegang rangkaian
dasar
Melepaskan rangkaian
dasar
RI1
4. Memasang bantalan gerak pada sekrup
Memegang sekrup
5,2
ET5,5/16
Memegang sekrup
7,3
EF
Memegang sekrup
11,4
R16A
Memegang sekrup
G1A
Memegang sekrup
18,7
M16C
Memegang sekrup
16
P1NSD
Memegang sekrup
44,4
3*T180M
Melepaskan sekrup
Rl1
No,
Keterangan
Elemen
Gerakan
Memasang
sekrup pada
rangkaian
dasar
Memasang
bantalan
gerak pada
sekrup
Eye travel dengan
dengan T = 5,5" dan D =
16"
Eye focus
Menjangkau bantalan
gerak yang berjarak 40
cm dari operator
Memegang bantalan
gerak
Memindahkan bantalan
gerak ke dekat operator
(40 cm)
Memposisikan bantalan
gerak ke sekrup
Memutarkan bantalan
gerak sebesar 180*
sebanyak 3 kali
Melepaskan bantalan
gerak
Jumlah
Total
Waktu
ulang
waktu
(detik)
per
(detik)
siklus
TMU
Faktor
Konversi
0.036(detik)
Kelonggaran
16%
346,1
12,46
1,994
14,454
14,454
107
3,852
0,616
4,468
4,468
Total
26,768
(lanjut)
Tabel III.3 Bagan Analisis Setelah Perbaikan (lanjutan)
BAGAN ANALISIS SETELAH PERBAIKAN
Tanggal : 15 Februari 2016
III-12
____
BAB III PENGUMPULAN DAN
PENGOLAHAN DATA
Operasi : Merakit baby vise
Analis : Kelompok 21
Keterangan Tangan Kiri
Lembar ke - 3 dari 5 lembar
LH
TMU
RH
Keterangan Tangan
Kanan
5. Memasangkan tangkai panjang pada rangkaian dasar
Menjangkau rangkaian
Menjangkau tangkai
R16
dasar yang berjarak 40
11,4
R16A
panjang yang berjarak
A
cm dari operator
40 cm dari operator
Memegang rangkaian
Memegang tangkai
G1A
2
G1A
dasar
panjang
Membawa rangkaian
Membawa tangkai
M16
dasar ke dekat operator
18,7
M16C
panjang ke dekat
C
(40 cm)
operator (40 cm)
Memposisikan tangkai
Memegang rangkaian
16
P1NSD
panjang pada
dasar
rangkaian dasar
6, Mengencangkan sekrup
Memegang rangkaian
Memegang tangkai
dasar dan tangkai
2
G1A
pendek
panjang
Memegang rangkaian
Memutarkan tangkai
dasar dan tangkai
296
20*T180M
pendek sebesar 360*
panjang
sebanyak 10 kali
Jumlah
Keterangan
Faktor
Total
Kelonggaran Waktu
ulang
No,
Elemen
TMU
Konversi
waktu
16%
(detik)
per
Gerakan
0.036(detik)
(detik)
siklus
Memasangkan
tangkai panjang
5
48,1
1,732
0,277
2,009
1
2,009
pada rangkaian
dasar
Mengencangkan
6
298
10,728
1,717
12,445
1
12,445
sekrup
Total
41,222
(lanjut)
Tabel III.3 Bagan Analisis Setelah Perbaikan (lanjutan)
BAGAN ANALISIS SETELAH PERBAIKAN
Tanggal : 15 Februari 2016
III-13
____
BAB III PENGUMPULAN DAN
PENGOLAHAN DATA
Operasi : Merakit baby vise
Analis : Kelompok 21
Keterangan Tangan
Kiri
Lembar ke - 4 dari 5 lembar
LH
TMU
RH
Keterangan Tangan
Kanan
7. Memasang mur besar pada tangkai panjang
Memegang
Eye travel dengan
rangkaian dasar dan
5,2
ET5,5/16
dengan T = 5,5" dan D
tangkai panjang
= 16"
Memegang
rangkaian dasar dan
7,3
EF
Eye focus
tangkai panjang
Memegang
Menjangkau mur besar
rangkaian dasar dan
11,4
R16A
yang berjarak 40 cm
tangkai panjang
dari operator
Memegang
rangkaian dasar dan
2
G1A
Memegang mur besar
tangkai panjang
Memindahkan mur
18,7
M16C
besar ke dekat operator
(40 cm)
Memposisikan mur
16
P1NSD
besar ke tangkai
panjang
Memutar mur besar
74
T180M
sebesar 180* sebanyak
5 kali
Jumlah
Keterangan
Faktor
Total
Kelonggaran Waktu
ulang
No,
Elemen
TMU
Konversi
waktu
16%
(detik)
per
Gerakan
0.036(detik)
(detik)
siklus
Memasang
mur besar
7
136,6
4,918
0,787
5,705
1
5,705
pada tangkai
panjang
Total
46,927
(lanjut)
Tabel III.3 Bagan Analisis Setelah Perbaikan (lanjutan)
III-14
____
BAB III PENGUMPULAN DAN
PENGOLAHAN DATA
BAGAN ANALISIS SETELAH PERBAIKAN
Tanggal : 15 Februari 2016
Operasi : Merakit baby vise
Analis : Kelompok 21
Keterangan Tangan
Kiri
Lembar ke - 5 dari 5 lembar
LH
TMU
RH
Keterangan Tangan
Kanan
8. Memasang rahang gerak pada rangkaian dasar
Memegang
Eye travel dengan
rangkaian dasar dan
21,9
ET30,7/21,3
dengan T = 30,7" dan D
tangkai panjang
= 21,3"
Memegang
Menjangkau rahang
rangkaian dasar dan
11,4
R16A
gerak yang berjarak 40
tangkai panjang
cm dari operator
Memegang
Memegang rahang
rangkaian dasar dan
2
G1A
gerak
tangkai panjang
Memegang
Memindahkan rahang
rangkaian dasar dan
16
M16A
gerak ke dekat operator
tangkai panjang
(40 cm)
Memposisikan
rangkaian dasar ke
P1NSD
16
rahang gerak
Memegang
Memutar tangkai
rangkaian dasar dan
710,4
48*T180M
panjang sejauh 360*
rahang gerak
sebanyak 24 kali
Memegang baby
Melepaskan tangkai
2
Rl1
vise
panjang
Memindahkan baby
vise ke tempat
M20A
19,2
produk
Melepaskan baby
Rl1
2
vise
Jumlah
Keterangan
Faktor
Total
Kelonggaran
Waktu
ulang
No,
Elemen
TMU
Konversi
waktu
16%
(detik)
per
Gerakan
0.036(detik)
(detik)
siklus
Memasang
rahang gerak
8
pada
800,9
28,832
4,613
33,445
1
33,445
rangkaian
dasar
Total
80,372
III-15
Anda mungkin juga menyukai
- Makalah PIKDokumen20 halamanMakalah PIKAgustian ChuagestuBelum ada peringkat
- 5.pewarnaan GramDokumen13 halaman5.pewarnaan GramIlhamBelum ada peringkat
- Tugas Besar Siut 1Dokumen19 halamanTugas Besar Siut 1Agustian ChuagestuBelum ada peringkat
- Daftar Kelompok Proses Industri KimiaDokumen2 halamanDaftar Kelompok Proses Industri KimiaAgustian ChuagestuBelum ada peringkat
- Acara KarbohidratDokumen17 halamanAcara KarbohidratAgustian ChuagestuBelum ada peringkat
- Makalah Kinkat Sintetis Serat KaretDokumen8 halamanMakalah Kinkat Sintetis Serat KaretAgustian ChuagestuBelum ada peringkat
- Analisis StrengthDokumen2 halamanAnalisis StrengthAgustian ChuagestuBelum ada peringkat
- Penentuan Kadar Parasetamol Dalam Tablet Dengan Menggunakan High Performance Liquid Chromatograph1Dokumen11 halamanPenentuan Kadar Parasetamol Dalam Tablet Dengan Menggunakan High Performance Liquid Chromatograph1Agustian ChuagestuBelum ada peringkat
- KPI PerhitunganDokumen6 halamanKPI PerhitunganAgustian ChuagestuBelum ada peringkat
- Timeline CakahimDokumen5 halamanTimeline CakahimAgustian ChuagestuBelum ada peringkat
- Penentuan Kadar Parasetamol Dalam Tablet Dengan Menggunakan High Performance Liquid Chromatograph1Dokumen11 halamanPenentuan Kadar Parasetamol Dalam Tablet Dengan Menggunakan High Performance Liquid Chromatograph1Agustian ChuagestuBelum ada peringkat
- Laporan 2Dokumen3 halamanLaporan 2Agustian ChuagestuBelum ada peringkat
- Soal Kuis Komputasi 2013-FixDokumen2 halamanSoal Kuis Komputasi 2013-FixMichael AlanBelum ada peringkat
- Penentuan Kadar Parasetamol Dalam Tablet Dengan Menggunakan High Performance Liquid Chromatograph1Dokumen11 halamanPenentuan Kadar Parasetamol Dalam Tablet Dengan Menggunakan High Performance Liquid Chromatograph1Agustian ChuagestuBelum ada peringkat
- Literatur Teknik KimiaDokumen11 halamanLiteratur Teknik KimiaAgustian ChuagestuBelum ada peringkat
- Penggolongan Antibiotik Berdasarkan Mekanisme KerjanyaDokumen28 halamanPenggolongan Antibiotik Berdasarkan Mekanisme KerjanyaAin Hariri100% (3)
- Fermentasi AlkoholisDokumen13 halamanFermentasi AlkoholisAgustian ChuagestuBelum ada peringkat
- Bacillus StearothermophilusDokumen2 halamanBacillus StearothermophilusAgustian Chuagestu100% (1)
- Fermentasi AlkoholisDokumen13 halamanFermentasi AlkoholisAgustian ChuagestuBelum ada peringkat
- Curiculum VitaeDokumen1 halamanCuriculum VitaeAgustian ChuagestuBelum ada peringkat
- Perhitungan Jumlah Mikroba Secara LangsungDokumen8 halamanPerhitungan Jumlah Mikroba Secara LangsungRachmat SaputraBelum ada peringkat
- Cover LaporanDokumen1 halamanCover LaporanAgustian ChuagestuBelum ada peringkat
- AnfiskimkromatografiDokumen32 halamanAnfiskimkromatografiAgustian ChuagestuBelum ada peringkat
- KLASIFIKASIDokumen20 halamanKLASIFIKASIdanangnurfauziBelum ada peringkat
- Perpustakaan Universitas Indonesia Buku TeksDokumen1 halamanPerpustakaan Universitas Indonesia Buku TeksAgustian ChuagestuBelum ada peringkat
- BD 354 FB 9Dokumen15 halamanBD 354 FB 9Leite AddyBelum ada peringkat
- Bab IDokumen13 halamanBab IRizky Cahya PutraBelum ada peringkat
- Latihan LogikaDokumen7 halamanLatihan LogikaAgustian ChuagestuBelum ada peringkat
- Latihan Logika PGDokumen3 halamanLatihan Logika PGAgustian ChuagestuBelum ada peringkat