Anda mungkin juga menyukai
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Sweet Emotion: Bass Line ForDokumen2 halamanSweet Emotion: Bass Line ForJames Gale100% (1)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Guidance for Processing SushiDokumen24 halamanGuidance for Processing SushigsyaoBelum ada peringkat
- OCFINALEXAM2019Dokumen6 halamanOCFINALEXAM2019DA FT100% (1)
- Pratt & Whitney Engine Training ResourcesDokumen5 halamanPratt & Whitney Engine Training ResourcesJulio Abanto50% (2)
- Community Tax Certificate PRINTDokumen2 halamanCommunity Tax Certificate PRINTClarenz0% (1)
- Zonal Systems Patent Application 5th For Security Zones, Parking Zones, RoboZonesDokumen153 halamanZonal Systems Patent Application 5th For Security Zones, Parking Zones, RoboZonesJames "Chip" NorthrupBelum ada peringkat
- Autonomous Vehicle ZonesDokumen31 halamanAutonomous Vehicle ZonesJames "Chip" NorthrupBelum ada peringkat
- Drone Zones: Virtual Geo-Enclosures For Air SpacesDokumen30 halamanDrone Zones: Virtual Geo-Enclosures For Air SpacesJames "Chip" NorthrupBelum ada peringkat
- Toll Zones - Zonal Toll Roads and Paid ParkingDokumen25 halamanToll Zones - Zonal Toll Roads and Paid ParkingJames "Chip" NorthrupBelum ada peringkat
- Zonal Places - Mobile App Geo-EnclosuresDokumen31 halamanZonal Places - Mobile App Geo-EnclosuresJames "Chip" NorthrupBelum ada peringkat
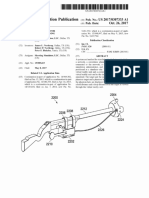
- Virtual Reality Gun Controller For TrainingDokumen53 halamanVirtual Reality Gun Controller For TrainingJames "Chip" NorthrupBelum ada peringkat
- Zonal Toll RoadsDokumen25 halamanZonal Toll RoadsJames "Chip" NorthrupBelum ada peringkat
- Patent For Virtual, Augmented and Mixed Reality Shooting SimulatorDokumen34 halamanPatent For Virtual, Augmented and Mixed Reality Shooting SimulatorJames "Chip" NorthrupBelum ada peringkat
- Virtual Reality Shooting Game PatentDokumen47 halamanVirtual Reality Shooting Game PatentJames "Chip" NorthrupBelum ada peringkat
- Zonal Control For Autonomous VehiclesDokumen31 halamanZonal Control For Autonomous VehiclesJames "Chip" NorthrupBelum ada peringkat
- Zonal Systems OverviewDokumen17 halamanZonal Systems OverviewJames "Chip" NorthrupBelum ada peringkat
- Zonal RetailDokumen30 halamanZonal RetailJames "Chip" NorthrupBelum ada peringkat
- Patent For Virtual, Augmented and Mixed Reality Shooting Simulator Using A Real GunDokumen34 halamanPatent For Virtual, Augmented and Mixed Reality Shooting Simulator Using A Real GunJames "Chip" NorthrupBelum ada peringkat
- Zonal Systems Control of Remote ActivitiesDokumen30 halamanZonal Systems Control of Remote ActivitiesJames "Chip" NorthrupBelum ada peringkat
- Virtual Reality Shotgun Shooting SimulatorDokumen35 halamanVirtual Reality Shotgun Shooting SimulatorJames "Chip" NorthrupBelum ada peringkat
- Zonal Systems Geo-Enclosure Patent For Control of MachinesDokumen127 halamanZonal Systems Geo-Enclosure Patent For Control of MachinesJames "Chip" NorthrupBelum ada peringkat
- Zonal Control: Automated Control of Geo-ZonesDokumen33 halamanZonal Control: Automated Control of Geo-ZonesJames "Chip" NorthrupBelum ada peringkat
- Texas Municipal Frack Reparations House Bill 539Dokumen4 halamanTexas Municipal Frack Reparations House Bill 539James "Chip" NorthrupBelum ada peringkat
- Rockefeller Climate Change LetterDokumen4 halamanRockefeller Climate Change LetterJames "Chip" NorthrupBelum ada peringkat
- Zonal Control US Patent 9319834Dokumen30 halamanZonal Control US Patent 9319834James "Chip" NorthrupBelum ada peringkat
- Unlawful Gas Lease ExtensionDokumen14 halamanUnlawful Gas Lease ExtensionJames "Chip" NorthrupBelum ada peringkat
- Texas Frack Anywhere Commercially Reasonable Test FailDokumen1 halamanTexas Frack Anywhere Commercially Reasonable Test FailJames "Chip" NorthrupBelum ada peringkat
- Zonal Systems US Patent 9317996Dokumen44 halamanZonal Systems US Patent 9317996James "Chip" NorthrupBelum ada peringkat
- Radioactive Frack Waste in PennsylvaniaDokumen25 halamanRadioactive Frack Waste in PennsylvaniaJames "Chip" NorthrupBelum ada peringkat
- Radioactive Frack Waste in PennsylvaniaDokumen25 halamanRadioactive Frack Waste in PennsylvaniaJames "Chip" NorthrupBelum ada peringkat
- Texas Frack Anywhere Bill HB 40Dokumen2 halamanTexas Frack Anywhere Bill HB 40James "Chip" NorthrupBelum ada peringkat
- Gas Pipeline RIght of Way CondemnationDokumen56 halamanGas Pipeline RIght of Way CondemnationJames "Chip" NorthrupBelum ada peringkat
- Texas HB 40 Frack Anywhere CommmentsDokumen2 halamanTexas HB 40 Frack Anywhere CommmentsJames "Chip" NorthrupBelum ada peringkat
- Duties of Trustees ExplainedDokumen39 halamanDuties of Trustees ExplainedZia IzaziBelum ada peringkat
- EN4264 Final Essay - GeraldineDokumen25 halamanEN4264 Final Essay - GeraldineGeraldine WongBelum ada peringkat
- Symbiosis Law School ICE QuestionsDokumen2 halamanSymbiosis Law School ICE QuestionsRidhima PurwarBelum ada peringkat
- 100 Inspirational Quotes On LearningDokumen9 halaman100 Inspirational Quotes On LearningGlenn VillegasBelum ada peringkat
- Colorectal Disease - 2023 - Freund - Can Preoperative CT MR Enterography Preclude The Development of Crohn S Disease LikeDokumen10 halamanColorectal Disease - 2023 - Freund - Can Preoperative CT MR Enterography Preclude The Development of Crohn S Disease Likedavidmarkovic032Belum ada peringkat
- Week 10 8th Grade Colonial America The Southern Colonies Unit 2Dokumen4 halamanWeek 10 8th Grade Colonial America The Southern Colonies Unit 2santi marcucciBelum ada peringkat
- Trends in Email Design and MarketingDokumen18 halamanTrends in Email Design and MarketingDaria KomarovaBelum ada peringkat
- Choosing the Right Organizational Pattern for Your SpeechDokumen19 halamanChoosing the Right Organizational Pattern for Your SpeechKyle RicardoBelum ada peringkat
- B1 Grammar and VocabularyDokumen224 halamanB1 Grammar and VocabularyTranhylapBelum ada peringkat
- Capetown Halal RestaurantsDokumen1 halamanCapetown Halal RestaurantsKhawaja UsmanBelum ada peringkat
- HIstory of PerfumeDokumen3 halamanHIstory of PerfumebetselevenBelum ada peringkat
- Tarea 1Dokumen36 halamanTarea 1LUIS RVBelum ada peringkat
- Inmarsat M2M Terminal ComparisonDokumen2 halamanInmarsat M2M Terminal Comparisonmaruka33Belum ada peringkat
- Sach Bai Tap Tieng Anh8 - Mai Lan HuongDokumen157 halamanSach Bai Tap Tieng Anh8 - Mai Lan Huongvothithao19750% (1)
- Doctrine of Double EffectDokumen69 halamanDoctrine of Double Effectcharu555Belum ada peringkat
- 1603 Physics Paper With Ans Sol EveningDokumen8 halaman1603 Physics Paper With Ans Sol EveningRahul RaiBelum ada peringkat
- All India Ticket Restaurant Meal Vouchers DirectoryDokumen1.389 halamanAll India Ticket Restaurant Meal Vouchers DirectoryShauvik HaldarBelum ada peringkat
- Air India CpioDokumen5 halamanAir India CpioVicky GautamBelum ada peringkat
- Project Notes PackagingDokumen4 halamanProject Notes PackagingAngrej Singh SohalBelum ada peringkat
- Excel Working Cost ProjectDokumen3 halamanExcel Working Cost ProjectMuhammad MuzammalBelum ada peringkat
- Blood TestsDokumen3 halamanBlood TestsMarycharinelle Antolin MolinaBelum ada peringkat
- Old Testament Books Bingo CardsDokumen9 halamanOld Testament Books Bingo CardsSiagona LeblancBelum ada peringkat
- Southern Railway, Tiruchchirappalli: RC Guards Batch No: 1819045 Paper PresentationDokumen12 halamanSouthern Railway, Tiruchchirappalli: RC Guards Batch No: 1819045 Paper PresentationSathya VBelum ada peringkat
- Year 7 Depth Study 2a 2020 5Dokumen6 halamanYear 7 Depth Study 2a 2020 5api-508928238Belum ada peringkat
- Solutions Manual For Corporate Finance, 6e Jonathan BerkDokumen7 halamanSolutions Manual For Corporate Finance, 6e Jonathan Berksobiakhan52292Belum ada peringkat