Anda mungkin juga menyukai
- Study of a reluctance magnetic gearbox for energy storage system applicationDari EverandStudy of a reluctance magnetic gearbox for energy storage system applicationPenilaian: 1 dari 5 bintang1/5 (1)
- Electrical Overstress (EOS): Devices, Circuits and SystemsDari EverandElectrical Overstress (EOS): Devices, Circuits and SystemsBelum ada peringkat
- Physics of Dielectrics and DRAMDokumen31 halamanPhysics of Dielectrics and DRAMUdai SinghBelum ada peringkat
- 1 IntroductionDokumen61 halaman1 Introductionfiraol temesgenBelum ada peringkat
- Cognitive RadioDokumen65 halamanCognitive Radiousman_arain_lhr0% (1)
- 3 3 1 Optical Applications With CST MICROWAVE STUDIODokumen36 halaman3 3 1 Optical Applications With CST MICROWAVE STUDIOmsajjad_68Belum ada peringkat
- Fundamentals of Electric Propulsion: Ion and Hall ThrustersDari EverandFundamentals of Electric Propulsion: Ion and Hall ThrustersBelum ada peringkat
- Submitted By: Rajat Garg C08541 EECE, 7th SemDokumen22 halamanSubmitted By: Rajat Garg C08541 EECE, 7th Semrajatgarg90Belum ada peringkat
- Axial PErmanent MAgnetDokumen6 halamanAxial PErmanent MAgnetSatyam Swarup100% (1)
- Design and Development of Medical Electronic Instrumentation: A Practical Perspective of the Design, Construction, and Test of Medical DevicesDari EverandDesign and Development of Medical Electronic Instrumentation: A Practical Perspective of the Design, Construction, and Test of Medical DevicesBelum ada peringkat
- Jones Tutorial 2 On Stepping MotorsDokumen125 halamanJones Tutorial 2 On Stepping MotorsVictor UrbinaBelum ada peringkat
- Wood Pole KN RatingsDokumen3 halamanWood Pole KN Ratingsjobpei2Belum ada peringkat
- IQ2010 For LabVIEW Quick Start GuideDokumen4 halamanIQ2010 For LabVIEW Quick Start GuideRicardo PaivaBelum ada peringkat
- 002 5956Dokumen62 halaman002 5956Dipen K. DasBelum ada peringkat
- Position Sensing: Angle and Distance Measurement for EngineersDari EverandPosition Sensing: Angle and Distance Measurement for EngineersBelum ada peringkat
- Assembling An HRPT SystemDokumen5 halamanAssembling An HRPT Systembill_crews100% (1)
- Hands-on TinyML: Harness the power of Machine Learning on the edge devices (English Edition)Dari EverandHands-on TinyML: Harness the power of Machine Learning on the edge devices (English Edition)Penilaian: 5 dari 5 bintang5/5 (1)
- Advanced Computational and Design Techniques in Applied Electromagnetic Systems: Proceedings of the International ISEM Symposium on Advanced Computational and Design Techniques in Applied Electromagnetic Systems, Seoul, Korea, 22-24 June, 1994Dari EverandAdvanced Computational and Design Techniques in Applied Electromagnetic Systems: Proceedings of the International ISEM Symposium on Advanced Computational and Design Techniques in Applied Electromagnetic Systems, Seoul, Korea, 22-24 June, 1994Belum ada peringkat
- Hollow State in A Solid State WorldDokumen1 halamanHollow State in A Solid State Worldapi-3701386Belum ada peringkat
- Electronics 3 Checkbook: The Checkbooks SeriesDari EverandElectronics 3 Checkbook: The Checkbooks SeriesPenilaian: 5 dari 5 bintang5/5 (1)
- Implementation of Autonomous Control System of The Chain Wheel Robot Using The Backpropagation Artificial Neural Network (ANN) MethodsDokumen6 halamanImplementation of Autonomous Control System of The Chain Wheel Robot Using The Backpropagation Artificial Neural Network (ANN) MethodsInternational Journal of Innovative Science and Research Technology100% (1)
- Water Cooled Axial Flux Motor High TorqueDokumen7 halamanWater Cooled Axial Flux Motor High TorqueSteven SullivanBelum ada peringkat
- Shortwave DiathermyDokumen40 halamanShortwave DiathermyPraneethaBelum ada peringkat
- Permanent Magnet Technology in Wind Power GeneratorsDokumen6 halamanPermanent Magnet Technology in Wind Power GeneratorsPaulius BruneikaBelum ada peringkat
- Resonant Inductive Coupling WPTDokumen83 halamanResonant Inductive Coupling WPTABHIJIT CHANDRA100% (1)
- Specialty Optical Fibers HandbookDari EverandSpecialty Optical Fibers HandbookAlexis MendezBelum ada peringkat
- 6360 LV User InstructionsDokumen11 halaman6360 LV User InstructionsPrasanth MenonBelum ada peringkat
- PIFA Planar Inverted F AntennaDokumen4 halamanPIFA Planar Inverted F AntennaAhsan AltafBelum ada peringkat
- Mathematical Theory of Connecting Networks and Telephone TrafficDari EverandMathematical Theory of Connecting Networks and Telephone TrafficBelum ada peringkat
- Sound From UltrasoundDokumen9 halamanSound From UltrasoundNakul NemaBelum ada peringkat
- Tesla Coil ProjectDokumen58 halamanTesla Coil Projectvdahiya007Belum ada peringkat
- Micro-nanoelectronics Devices: Modeling of Diffusion and Operation ProcessesDari EverandMicro-nanoelectronics Devices: Modeling of Diffusion and Operation ProcessesBelum ada peringkat
- Magneto Hydro Dynamic Power Generation MHDDokumen29 halamanMagneto Hydro Dynamic Power Generation MHDSubin JamesBelum ada peringkat
- Grounding Basics 3 - Solar Panel GroundingDokumen9 halamanGrounding Basics 3 - Solar Panel GroundingCarolBelum ada peringkat
- Transistorized Series Voltage RegulatorDokumen4 halamanTransistorized Series Voltage RegulatorIpsita MishraBelum ada peringkat
- Acoustical Transducers - Lecture 5Dokumen25 halamanAcoustical Transducers - Lecture 5Anonymous W9zlG22RBelum ada peringkat
- Magnetic Levitation SystemDokumen9 halamanMagnetic Levitation SystemArjun SreenivasBelum ada peringkat
- IntroductionToTheArduinoMicrocontroller PDFDokumen3 halamanIntroductionToTheArduinoMicrocontroller PDFNikhilesh ThatipamulaBelum ada peringkat
- Virtual WireDokumen13 halamanVirtual WirePedro Nuno Sabugueiro OliveiraBelum ada peringkat
- A New Computer-Based Ferromagnetic Metal Detector For Security ApplicationsDokumen8 halamanA New Computer-Based Ferromagnetic Metal Detector For Security ApplicationsJalalBelum ada peringkat
- Introduction To Linear Integrated CircuitsDokumen12 halamanIntroduction To Linear Integrated CircuitsAnil Kumar YernintiBelum ada peringkat
- Unit IDokumen37 halamanUnit IDINESH KUMAR DRAVIDAMANIBelum ada peringkat
- An-MPU-9250A-03 MPU-9250 Accel Gyro and Compass Self-Test Implementation v1 0 - 062813Dokumen14 halamanAn-MPU-9250A-03 MPU-9250 Accel Gyro and Compass Self-Test Implementation v1 0 - 062813Herry WijayaBelum ada peringkat
- Schedule PlanDokumen3 halamanSchedule PlanAnonymous hWj4HKIDOFBelum ada peringkat
- The Speed of Trust: Based On The Book by Stephen MR CoveyDokumen34 halamanThe Speed of Trust: Based On The Book by Stephen MR CoveyAnonymous hWj4HKIDOF100% (1)
- Tedy Kuswara: A StorytellerDokumen1 halamanTedy Kuswara: A StorytellerAnonymous hWj4HKIDOFBelum ada peringkat
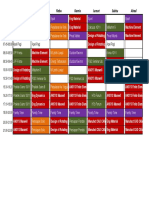
- Jadwal Juli - Oktober 2016 HarianDokumen1 halamanJadwal Juli - Oktober 2016 HarianAnonymous hWj4HKIDOFBelum ada peringkat
- Jadwal Persiapan S2 v2Dokumen1 halamanJadwal Persiapan S2 v2Anonymous hWj4HKIDOFBelum ada peringkat
- 5716159Dokumen34 halaman5716159Anonymous hWj4HKIDOFBelum ada peringkat
- Goldstein R J Fluid Mechanics MeasurementsDokumen1 halamanGoldstein R J Fluid Mechanics MeasurementsAnonymous hWj4HKIDOFBelum ada peringkat
- UPM University Petru Major 13 183 PaperDokumen3 halamanUPM University Petru Major 13 183 PaperAnonymous hWj4HKIDOFBelum ada peringkat
- Chapter 2 - Macromechanical Analysis of A Lamina Exercise SetDokumen12 halamanChapter 2 - Macromechanical Analysis of A Lamina Exercise SetAnonymous hWj4HKIDOFBelum ada peringkat
- 3241 Lecture 2Dokumen8 halaman3241 Lecture 2Anonymous hWj4HKIDOFBelum ada peringkat
- Vehicle Dynamics: Instructor: Ashok Kumar Pandey EmailDokumen6 halamanVehicle Dynamics: Instructor: Ashok Kumar Pandey EmailAnonymous hWj4HKIDOFBelum ada peringkat
- Automating Battery Pack Design AA V9 I2Dokumen4 halamanAutomating Battery Pack Design AA V9 I2Anonymous hWj4HKIDOFBelum ada peringkat
- MSC Development Planning and MSC Development Planning Research ScholarshipsDokumen2 halamanMSC Development Planning and MSC Development Planning Research ScholarshipsAnonymous hWj4HKIDOFBelum ada peringkat
- Presentation 1Dokumen4 halamanPresentation 1Anonymous hWj4HKIDOFBelum ada peringkat
- Section 133123Dokumen11 halamanSection 133123Dian Aplimon JohannisBelum ada peringkat
- Semikron Datasheet Skiip 23ac126v1 25231080Dokumen4 halamanSemikron Datasheet Skiip 23ac126v1 25231080Antonio Carlos CardosoBelum ada peringkat
- Adavances in Positioning and FramesDokumen407 halamanAdavances in Positioning and Framesoliwia.tolloczkoBelum ada peringkat
- Modified Moment Estimation For A Two Parameter Gamma DistributionDokumen9 halamanModified Moment Estimation For A Two Parameter Gamma DistributionInternational Organization of Scientific Research (IOSR)Belum ada peringkat
- Nortje Desiree 2002 PDFDokumen328 halamanNortje Desiree 2002 PDFAtul KulkarniBelum ada peringkat
- Materials and Approaches For On Body Energy HarvestingDokumen8 halamanMaterials and Approaches For On Body Energy HarvestingShotech EngineeringBelum ada peringkat
- Wave Propagation in Shallow Water: Ert - C WDokumen24 halamanWave Propagation in Shallow Water: Ert - C WMarco QuirozBelum ada peringkat
- Self Assessment ASPDokumen104 halamanSelf Assessment ASPTarek San100% (1)
- Isolation and Purification of AlkaloidsDokumen14 halamanIsolation and Purification of AlkaloidsLuděk SpurnýBelum ada peringkat
- Introductory Circuit Theory by Guillemin ErnstDokumen580 halamanIntroductory Circuit Theory by Guillemin ErnstJunaid IqbalBelum ada peringkat
- Experiences of ISFOC On Concentration Photovoltaic: Francisca RubioDokumen49 halamanExperiences of ISFOC On Concentration Photovoltaic: Francisca RubioHikary AcevesBelum ada peringkat
- Abbreviated Piping TermsDokumen7 halamanAbbreviated Piping TermsZulkeefal DarBelum ada peringkat
- Chem Lab 12 IndicatorsDokumen2 halamanChem Lab 12 IndicatorsZaleBelum ada peringkat
- Disturbance-Rejection vs. SetpointDokumen5 halamanDisturbance-Rejection vs. SetpointravaraeBelum ada peringkat
- Session - 5 FEA of Grids: Module Code: 19STC502A-2021Dokumen34 halamanSession - 5 FEA of Grids: Module Code: 19STC502A-2021rajaBelum ada peringkat
- Strength Performance of Full-Size Structural Timber of Dryobalanops Species of Sarawak, MalaysiaDokumen7 halamanStrength Performance of Full-Size Structural Timber of Dryobalanops Species of Sarawak, Malaysiaqidunk ipsiBelum ada peringkat
- A History of PhotographyDokumen49 halamanA History of PhotographyderghalBelum ada peringkat
- Conclusion and Recommendations HTDokumen1 halamanConclusion and Recommendations HTAdiel AdrieBelum ada peringkat
- Division 2 - Site WorkDokumen14 halamanDivision 2 - Site WorkWincelet CelestinoBelum ada peringkat
- Press Tool ReportDokumen40 halamanPress Tool ReportIshu Bassan100% (2)
- En Jkm320pp (4bb)Dokumen2 halamanEn Jkm320pp (4bb)Ronal100% (1)
- CV 101Dokumen4 halamanCV 101frco1504Belum ada peringkat
- Drop of Water On Penny - HandoutDokumen7 halamanDrop of Water On Penny - Handoutapi-240932330Belum ada peringkat
- RT Finalpresenatation08 161118104713Dokumen56 halamanRT Finalpresenatation08 161118104713sajay2010Belum ada peringkat
- Formsat 5Dokumen6 halamanFormsat 5gramuiitmBelum ada peringkat
- t9 PDFDokumen21 halamant9 PDFselvaganapathy1992Belum ada peringkat
- Engine Control SystemDokumen7 halamanEngine Control SystemFaisal Al HusainanBelum ada peringkat
- Mayan Calendar ExplainedDokumen9 halamanMayan Calendar Explainedbresail40% (1)
- Reservoir Management Session 3 W Solutions PDFDokumen39 halamanReservoir Management Session 3 W Solutions PDFEmad ZakiBelum ada peringkat
- The Hubbard Coil MatrixDokumen4 halamanThe Hubbard Coil MatrixAna Luisa Lynce100% (1)