Anda mungkin juga menyukai
- 28 Macros HostDokumen22 halaman28 Macros HostjjprietojBelum ada peringkat
- Manual Omega 92Dokumen50 halamanManual Omega 92Van Xuong0% (1)
- Lab 5 The Voltage DividerDokumen5 halamanLab 5 The Voltage Dividerapi-253978194Belum ada peringkat
- Stress Strain Apparatus LabDokumen4 halamanStress Strain Apparatus Labapi-253978194Belum ada peringkat
- Homework 1Dokumen3 halamanHomework 1api-253978194100% (1)
- Experiment 1 Measurement of Resistance Lab 1Dokumen8 halamanExperiment 1 Measurement of Resistance Lab 1api-253978194100% (1)
- Homework 5Dokumen3 halamanHomework 5api-253978194Belum ada peringkat
- Setup: Chapter 2 - End-To-End Machine Learning ProjectDokumen31 halamanSetup: Chapter 2 - End-To-End Machine Learning ProjectAmitBelum ada peringkat
- Lab 2: Mobile Robot Path Tracking Using Odometry 2.12: Introduction To Robotics Fall 2016Dokumen6 halamanLab 2: Mobile Robot Path Tracking Using Odometry 2.12: Introduction To Robotics Fall 2016OK BrosBelum ada peringkat
- DSP Lab ManualDokumen54 halamanDSP Lab Manualkpsvenu100% (1)
- MEC3457 Computer Lab 1 PDFDokumen8 halamanMEC3457 Computer Lab 1 PDFMuhammad Abbas RawjaniBelum ada peringkat
- Review of Scilab Command LinesDokumen6 halamanReview of Scilab Command Linesrain583Belum ada peringkat
- Biomedical Robotics LabDokumen32 halamanBiomedical Robotics LabZainabBelum ada peringkat
- Guia de Laboratorio Matlab PDFDokumen52 halamanGuia de Laboratorio Matlab PDFSNAIDER SMITH CANTILLO PEREZBelum ada peringkat
- Control Systems Lab 01Dokumen11 halamanControl Systems Lab 01Shanawar AliBelum ada peringkat
- Human Arm Imitation by A 7 DOF Serial MaDokumen5 halamanHuman Arm Imitation by A 7 DOF Serial MaPrateek Kumar PandeyBelum ada peringkat
- Lab#4 ReportDokumen14 halamanLab#4 ReportShameen MazharBelum ada peringkat
- Labs-TE Lab Manual DSPDokumen67 halamanLabs-TE Lab Manual DSPAntony John BrittoBelum ada peringkat
- Kalman Filter For Mobile Robot Localization: Who? From?Dokumen29 halamanKalman Filter For Mobile Robot Localization: Who? From?PauloBelum ada peringkat
- SIGNALS-SYSTEMS LAB ManualDokumen44 halamanSIGNALS-SYSTEMS LAB Manualmahendra161024Belum ada peringkat
- Data Com Tomorrow Lab1Dokumen53 halamanData Com Tomorrow Lab1MDRAKIB180 107Belum ada peringkat
- Lab LTI-System-Modeling Using MatlabDokumen18 halamanLab LTI-System-Modeling Using MatlabZubair MuzaffarBelum ada peringkat
- Manipulator KinematicsDokumen24 halamanManipulator KinematicsQueron Williams100% (2)
- Analysis On Algorithm of Wavelet Transform and Its Realization in C LanguageDokumen3 halamanAnalysis On Algorithm of Wavelet Transform and Its Realization in C Languagevahdat_kazemiBelum ada peringkat
- Mfa Merit Exercises 5 Simulink 5174 2Dokumen8 halamanMfa Merit Exercises 5 Simulink 5174 2JamesBelum ada peringkat
- Practical File OF Digital Signal Processing LabDokumen25 halamanPractical File OF Digital Signal Processing Lab65 - Ravitosh SarwanBelum ada peringkat
- Expt 3 Generation of Continous Signal CañeteDokumen4 halamanExpt 3 Generation of Continous Signal CañeteJHUSTINE CAÑETEBelum ada peringkat
- An Introduction To Matlab: Kocaeli University Assist. Prof. Dr. Osman Büyük Digital Signal Processing ApplicationsDokumen37 halamanAn Introduction To Matlab: Kocaeli University Assist. Prof. Dr. Osman Büyük Digital Signal Processing ApplicationsMd.Arifur RahmanBelum ada peringkat
- Itmt 270 Robotics Systems Application Assignment 5 (Computer Lab Report)Dokumen3 halamanItmt 270 Robotics Systems Application Assignment 5 (Computer Lab Report)api-253978194Belum ada peringkat
- Eec 161 امتحان نهاية الترم الثانى 2020-2021 - نظم تحكم عددىDokumen2 halamanEec 161 امتحان نهاية الترم الثانى 2020-2021 - نظم تحكم عددىArtist AbramBelum ada peringkat
- Capital University of Science and Technology Department of Mechanical EngineeringDokumen3 halamanCapital University of Science and Technology Department of Mechanical EngineeringhussainBelum ada peringkat
- SS Lab ManualDokumen48 halamanSS Lab ManualKannan RBelum ada peringkat
- Activity No.9 Frequency Domain Modeling in MatlabDokumen10 halamanActivity No.9 Frequency Domain Modeling in MatlabNAHUM ZERAH SACAYBelum ada peringkat
- Lab Manual It406matlabDokumen39 halamanLab Manual It406matlabDanishBelum ada peringkat
- MATLAB Programs, For 7th Sem CSE Students - Tushar KantDokumen4 halamanMATLAB Programs, For 7th Sem CSE Students - Tushar KantJámès KõstãBelum ada peringkat
- Co-Simulation Control of Robot Arm Dynamics in ADAMS and MATLABDokumen6 halamanCo-Simulation Control of Robot Arm Dynamics in ADAMS and MATLABMarlon Andres Cajamarca VegaBelum ada peringkat
- Control Systems MATLAB FileDokumen25 halamanControl Systems MATLAB FileAgamBelum ada peringkat
- ENGR 058 (Control Theory) Final: 1) Define The SystemDokumen24 halamanENGR 058 (Control Theory) Final: 1) Define The SystemBizzleJohnBelum ada peringkat
- Obstacle Avoidance Based On Fuzzy LogicDokumen5 halamanObstacle Avoidance Based On Fuzzy LogicMarcAlomarPayerasBelum ada peringkat
- Matlab Simulink For Control082pDokumen39 halamanMatlab Simulink For Control082pWills TtaccaBelum ada peringkat
- Lab 2 MATLAB UsmanDokumen11 halamanLab 2 MATLAB UsmanUsman jadoonBelum ada peringkat
- LAB-03 EE-311 Signal and Systems PDFDokumen12 halamanLAB-03 EE-311 Signal and Systems PDFAwais AliBelum ada peringkat
- Data Types and Input or Output OperatorsDokumen24 halamanData Types and Input or Output OperatorsRam NathBelum ada peringkat
- FEEDLAB 02 - System ModelsDokumen8 halamanFEEDLAB 02 - System ModelsAnonymous DHJ8C3oBelum ada peringkat
- Control System PracticalDokumen13 halamanControl System PracticalNITESH KumarBelum ada peringkat
- Emanuele FrontoniDokumen36 halamanEmanuele FrontoniDon Vito AndoliniBelum ada peringkat
- Lecture On MATLAB For Mechanical Engineers-LibreDokumen114 halamanLecture On MATLAB For Mechanical Engineers-LibreKadiyam VijayBelum ada peringkat
- MATLAB and Simulink in Mechatronics EducationDokumen10 halamanMATLAB and Simulink in Mechatronics EducationHilalAldemirBelum ada peringkat
- Cmslab Manual - 1Dokumen61 halamanCmslab Manual - 1tayybahaseeb18Belum ada peringkat
- CIR CalibrationDokumen8 halamanCIR CalibrationNicolas Lefevre-LaumonierBelum ada peringkat
- GA LAB Manual-1Dokumen33 halamanGA LAB Manual-1Sundar Shahi ThakuriBelum ada peringkat
- Servomechanism Controller - MATLAB & Simulink - MathWorks IndiaDokumen18 halamanServomechanism Controller - MATLAB & Simulink - MathWorks IndiaShin IgneelBelum ada peringkat
- Experiment - 2: Saransh Singhal & Sambhav JainDokumen13 halamanExperiment - 2: Saransh Singhal & Sambhav Jaintanya chaudharyBelum ada peringkat
- Ransfer Unction Epresentation: ObjectivesDokumen14 halamanRansfer Unction Epresentation: ObjectivesSohaib SajidBelum ada peringkat
- Chapter 2 Basic Features: 2.1 Simple MathDokumen10 halamanChapter 2 Basic Features: 2.1 Simple MathAli AhmadBelum ada peringkat
- LOKESH - DSP Practical File (251901018 ECE A)Dokumen25 halamanLOKESH - DSP Practical File (251901018 ECE A)wiwaBelum ada peringkat
- Atienza Lab3Dokumen18 halamanAtienza Lab3Marvin AtienzaBelum ada peringkat
- Sos 2Dokumen16 halamanSos 2youssef_dablizBelum ada peringkat
- DSP Manual HamdardDokumen52 halamanDSP Manual HamdardMuhammad IrfanBelum ada peringkat
- Lab Exp 1Dokumen16 halamanLab Exp 1NumanAbdullah100% (1)
- LAB 9: Introduction To MATLAB/SimulinkDokumen7 halamanLAB 9: Introduction To MATLAB/SimulinkSAMRA YOUSAFBelum ada peringkat
- Lab 1&2 LcsDokumen13 halamanLab 1&2 LcsMoiz SiddiquiBelum ada peringkat
- 1.intro. To Control System Toolbox 7 PGDokumen6 halaman1.intro. To Control System Toolbox 7 PGarupBelum ada peringkat
- Practica 1. Programming The Robot Scorbot Er V Using The Lenguage AclDokumen2 halamanPractica 1. Programming The Robot Scorbot Er V Using The Lenguage AclJosé Antonio Velásquez CostaBelum ada peringkat
- Backwoods Control TheoryDokumen18 halamanBackwoods Control TheoryakozyBelum ada peringkat
- Nonlinear Control Feedback Linearization Sliding Mode ControlDari EverandNonlinear Control Feedback Linearization Sliding Mode ControlBelum ada peringkat
- Itcm 202 Assignment - 6aDokumen4 halamanItcm 202 Assignment - 6aapi-253978194Belum ada peringkat
- Itcm 202 Assignment - 5a-1Dokumen2 halamanItcm 202 Assignment - 5a-1api-253978194Belum ada peringkat
- Lab 7 Series-Parallel Combination CircuitsDokumen7 halamanLab 7 Series-Parallel Combination Circuitsapi-253978194100% (1)
- Summary of VideosDokumen7 halamanSummary of Videosapi-253978194Belum ada peringkat
- Policy As It Applies To Technology, Communication, and EducationDokumen12 halamanPolicy As It Applies To Technology, Communication, and Educationapi-253978194Belum ada peringkat
- Homework7 1Dokumen11 halamanHomework7 1api-253978194Belum ada peringkat
- Homework 3Dokumen2 halamanHomework 3api-253978194Belum ada peringkat
- Homework 4Dokumen4 halamanHomework 4api-253978194Belum ada peringkat
- Homework 2Dokumen3 halamanHomework 2api-253978194Belum ada peringkat
- Bottles:: Lab 8 Shane HolbrookDokumen2 halamanBottles:: Lab 8 Shane Holbrookapi-253978194Belum ada peringkat
- Final ProjectDokumen14 halamanFinal Projectapi-253978194Belum ada peringkat
- Lab Assignment 4 1Dokumen3 halamanLab Assignment 4 1api-253978194Belum ada peringkat
- Lab 10Dokumen3 halamanLab 10api-253978194Belum ada peringkat
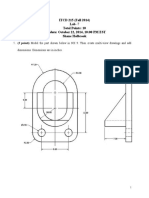
- ITCD 215 (Fall 2014) Lab - 8 Total Points: 10 Due Date: October 29, 2014, 10:00 PM EST Shane HolbrookDokumen5 halamanITCD 215 (Fall 2014) Lab - 8 Total Points: 10 Due Date: October 29, 2014, 10:00 PM EST Shane Holbrookapi-253978194Belum ada peringkat
- Lab 3 Parts 1 2Dokumen3 halamanLab 3 Parts 1 2api-253978194Belum ada peringkat
- Shane HolbrookDokumen2 halamanShane Holbrookapi-253978194Belum ada peringkat
- Lab 4Dokumen2 halamanLab 4api-253978194Belum ada peringkat
- ITCD 215 (Fall 2014) Lab - 7 Total Points: 10 Due Date: October 22, 2014, 10:00 PM EST Shane HolbrookDokumen4 halamanITCD 215 (Fall 2014) Lab - 7 Total Points: 10 Due Date: October 22, 2014, 10:00 PM EST Shane Holbrookapi-253978194Belum ada peringkat
- ITCD 215 (Fall 2014) Lab - 9 Total Points: 10 Due Date: November 05, 2014, 10:00 PM ESTDokumen5 halamanITCD 215 (Fall 2014) Lab - 9 Total Points: 10 Due Date: November 05, 2014, 10:00 PM ESTapi-253978194Belum ada peringkat
- System Verilog DatatypesDokumen50 halamanSystem Verilog DatatypesSinchana GuptaBelum ada peringkat
- Data Representation: Computer Organization & Assembly Language Programming DR Adnan Gutub Aagutub At' Uqu - Edu.saDokumen33 halamanData Representation: Computer Organization & Assembly Language Programming DR Adnan Gutub Aagutub At' Uqu - Edu.sasharikBelum ada peringkat
- Binary Classification Tutorial With The Keras Deep Learning LibraryDokumen33 halamanBinary Classification Tutorial With The Keras Deep Learning LibraryShudu TangBelum ada peringkat
- JBoss Drools Cookbook PDFDokumen91 halamanJBoss Drools Cookbook PDFRaghu Govardhana100% (1)
- Computer Programming PointersDokumen11 halamanComputer Programming PointersseminarprojectBelum ada peringkat
- Java ExercicesDokumen298 halamanJava Exerciceszakarya hamidallahBelum ada peringkat
- Grade 7 - Python Grade - : DT Assessment Development UnitDokumen5 halamanGrade 7 - Python Grade - : DT Assessment Development Unitaboubakr3000Belum ada peringkat
- Tour and Tarvel PROJECT SamplDokumen101 halamanTour and Tarvel PROJECT Sampldawit dd3784Belum ada peringkat
- Objectives: The Objectives of This Chapter AreDokumen22 halamanObjectives: The Objectives of This Chapter AreAnthonyArribasplataBelum ada peringkat
- Advanced Core JavaDokumen97 halamanAdvanced Core JavaSuresh100% (1)
- Embunit User GuideDokumen42 halamanEmbunit User GuidesashokcsBelum ada peringkat
- All Pair Shortest PathDokumen23 halamanAll Pair Shortest PathabcBelum ada peringkat
- Os Lab 1Dokumen77 halamanOs Lab 1Harshi HarshithaBelum ada peringkat
- Unit 4 - Week 3: Assignment 3Dokumen3 halamanUnit 4 - Week 3: Assignment 3Raushan KashyapBelum ada peringkat
- MEGALADokumen12 halamanMEGALAKumaresh SalemBelum ada peringkat
- PHP PDFDokumen85 halamanPHP PDFDibyas Sanjay Dubey100% (1)
- WillyDev VB6aNETDokumen719 halamanWillyDev VB6aNETJoan Costa CostaBelum ada peringkat
- Concept As A Generalization of Class and Principles of The Concept-Oriented ProgrammingDokumen45 halamanConcept As A Generalization of Class and Principles of The Concept-Oriented ProgrammingSatia SammyBelum ada peringkat
- WOW Node For Starter ProgrammerDokumen71 halamanWOW Node For Starter ProgrammerVicryy FahrezaBelum ada peringkat
- Tourism Management ProjectDokumen20 halamanTourism Management ProjectTanay PrasadBelum ada peringkat
- Java AnatomyDokumen16 halamanJava AnatomyYeshwini RamasamyBelum ada peringkat
- Modern Pandas: Hervé Mignot EquancyDokumen21 halamanModern Pandas: Hervé Mignot EquancySunny SongBelum ada peringkat
- Vue - Js CheatSheetDokumen13 halamanVue - Js CheatSheetdorinadidBelum ada peringkat
- BOF enDokumen86 halamanBOF enycBelum ada peringkat
- Midsem PDFDokumen20 halamanMidsem PDFAbhishek KunduBelum ada peringkat
- DeepLearningForVisionSystems Ch5 AlexNetDokumen32 halamanDeepLearningForVisionSystems Ch5 AlexNetmkkadambiBelum ada peringkat
- Hello Coding - Anyone Can Learn To Code Digital - Membership AreaDokumen20 halamanHello Coding - Anyone Can Learn To Code Digital - Membership Areamuhammadhassank417Belum ada peringkat