Anda mungkin juga menyukai
- Optimisez Votre Plate-Forme LogistiqueDokumen674 halamanOptimisez Votre Plate-Forme LogistiqueK B-g B-g100% (4)
- Travaux Maritimes-ConvertiDokumen9 halamanTravaux Maritimes-ConvertiAmira RaniaBelum ada peringkat
- Bilan Social PDFDokumen46 halamanBilan Social PDFidrissa dioum100% (3)
- M2GPC 2021 IntroductionDokumen232 halamanM2GPC 2021 IntroductionHajar Abunaeem50% (2)
- Mémoire Hydraulique - Barrage en TerreDokumen46 halamanMémoire Hydraulique - Barrage en TerreAmin Saadaoui90% (31)
- Cours de SondageDokumen49 halamanCours de SondageTrina MillerBelum ada peringkat
- Détermination de La Côte Du Radier Du Réservoir Et Des Pressions1Dokumen8 halamanDétermination de La Côte Du Radier Du Réservoir Et Des Pressions1ACID100% (1)
- TD 03 CorrigéDokumen5 halamanTD 03 CorrigéIbtissam Ait ighoudBelum ada peringkat
- TPs DE MECANIQUE DE FLUIDES - KAYALA PDFDokumen37 halamanTPs DE MECANIQUE DE FLUIDES - KAYALA PDFJacob IdongeBelum ada peringkat
- L'Orient Des Femmes Dossier de PresseDokumen25 halamanL'Orient Des Femmes Dossier de PresseJason WhittakerBelum ada peringkat
- Les Lignes de MouillageDokumen24 halamanLes Lignes de Mouillagebouraada0% (1)
- Chapitre I Regression Simple 2015 2016Dokumen78 halamanChapitre I Regression Simple 2015 2016oumBelum ada peringkat
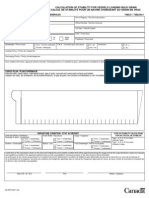
- Canadian Stability Form 82-0579 (0211-04)Dokumen8 halamanCanadian Stability Form 82-0579 (0211-04)agite1212Belum ada peringkat
- Design Aspects of Suction Caissons For Offshore Wind Turbine Foundations PDFDokumen19 halamanDesign Aspects of Suction Caissons For Offshore Wind Turbine Foundations PDFBehrang BaghernejadBelum ada peringkat
- 2014 Jacquard, Jan - Fondations Par Tirants Precnontraints de La Villa Mediterranee A Marseille FRDokumen10 halaman2014 Jacquard, Jan - Fondations Par Tirants Precnontraints de La Villa Mediterranee A Marseille FRLucas HoodBelum ada peringkat
- Three Dimensional Ship Hydrodynamic CoeficientDokumen68 halamanThree Dimensional Ship Hydrodynamic Coeficientrahulagarwal33Belum ada peringkat
- TP ResistanceDokumen11 halamanTP ResistancehamzaBelum ada peringkat
- Ballast Handling LogDokumen3 halamanBallast Handling LogPratap Singh Rathore KinsariyaBelum ada peringkat
- Calcul de StabilitateDokumen8 halamanCalcul de StabilitateIonut LecaBelum ada peringkat
- Aam AamDokumen122 halamanAam AamAmirotul AsliyahBelum ada peringkat
- Tabel Offset 085Dokumen11 halamanTabel Offset 085SaddamJahidinBelum ada peringkat
- Offshore Oil FRDokumen80 halamanOffshore Oil FRaniselouafi100% (1)
- Vibration Analysis at The Design Stage of 135000 m3 LNG CarrierDokumen10 halamanVibration Analysis at The Design Stage of 135000 m3 LNG CarrierKalipada SenBelum ada peringkat
- Memoire 8Dokumen14 halamanMemoire 8benarousBelum ada peringkat
- BLPC 250-251 PP 33-41 BustamanteDokumen9 halamanBLPC 250-251 PP 33-41 BustamanteusosanBelum ada peringkat
- Stabilité TPDokumen15 halamanStabilité TPNordine YahiaouiBelum ada peringkat
- MemoireDokumen19 halamanMemoireSalim AhmedBelum ada peringkat
- Pesée Du NavireDokumen32 halamanPesée Du Navireayoub.prohazlagBelum ada peringkat
- Corrigé de Lexamen de Ouvrage HydrauliqueDokumen3 halamanCorrigé de Lexamen de Ouvrage HydrauliqueAmel Hyd100% (2)
- 657 Corrige CG Sti2d 2013Dokumen50 halaman657 Corrige CG Sti2d 2013LE TOHICBelum ada peringkat
- Enseignements de Retours Dexperiences de BarragesDokumen23 halamanEnseignements de Retours Dexperiences de BarragesFranck ChewaBelum ada peringkat
- Contrôle - IP-GC 03 Et 04Dokumen3 halamanContrôle - IP-GC 03 Et 04khaoulaBelum ada peringkat
- Pile Alpha Method 2827Dokumen4 halamanPile Alpha Method 2827LMBong8881Belum ada peringkat
- Choix Et Caractéristiques Des Colonnes de Captage - BRGMDokumen106 halamanChoix Et Caractéristiques Des Colonnes de Captage - BRGMrvanBelum ada peringkat
- Cours Hydraulique - 4A v2014Dokumen121 halamanCours Hydraulique - 4A v2014amar bensaidBelum ada peringkat
- Physique-Chimie: 4 Heures Calculatrices AutoriséesDokumen8 halamanPhysique-Chimie: 4 Heures Calculatrices AutoriséesTAISSIR HENTATIBelum ada peringkat
- 06 48 10 P BoutinDokumen10 halaman06 48 10 P Boutinipman99Belum ada peringkat
- E4 U41 Bts CN 2018 SujetDokumen13 halamanE4 U41 Bts CN 2018 Sujetcoulibaly kassimBelum ada peringkat
- CalculsDokumen5 halamanCalculsbabcBelum ada peringkat
- Calcul des sections des ouvragesDokumen5 halamanCalcul des sections des ouvragesIlias LfnawiBelum ada peringkat
- CONTRÔLEDokumen3 halamanCONTRÔLEFairouz JammalBelum ada peringkat
- Techniquesdeforage Cours2017Dokumen13 halamanTechniquesdeforage Cours2017Raoul KoueksBelum ada peringkat
- Note de Calcul ChateauDokumen27 halamanNote de Calcul ChateauDieudonné Hilaire Mbarga100% (1)
- TD Statique Des Fluides 13 Nov 2018Dokumen1 halamanTD Statique Des Fluides 13 Nov 2018El Amrani WassimBelum ada peringkat
- Chapitre 6 PART 2 - Dimensionnement Des Ouvrages Portuaires (27!05!2021)Dokumen95 halamanChapitre 6 PART 2 - Dimensionnement Des Ouvrages Portuaires (27!05!2021)medreda.taziBelum ada peringkat
- Techniquesdeforage Cours2017Dokumen13 halamanTechniquesdeforage Cours2017djeramBelum ada peringkat
- Pfe GC 0107 PDFDokumen140 halamanPfe GC 0107 PDFAl byBelum ada peringkat
- Hydraulique Des Ouvrages de Franchissement Des Vallées FluvialesDokumen20 halamanHydraulique Des Ouvrages de Franchissement Des Vallées FluvialesAmira MansourkhodjaBelum ada peringkat
- Lecture DimentionnementDokumen8 halamanLecture Dimentionnementalex1.bonaparteBelum ada peringkat
- VIS ARCHIMEDE TURBINE INSA STRASBOURG G.DELLINGER AUGC Rev1 PDFDokumen8 halamanVIS ARCHIMEDE TURBINE INSA STRASBOURG G.DELLINGER AUGC Rev1 PDFIsmael ChomoBelum ada peringkat
- Technique de ForageDokumen13 halamanTechnique de ForageAllamine OUMARBelum ada peringkat
- 2011.TH18228.Rammal - Hussein.Chapitre 2 PDFDokumen29 halaman2011.TH18228.Rammal - Hussein.Chapitre 2 PDFRedouane FirdaoussiBelum ada peringkat
- SupportDokumen115 halamanSupportAmina OtsBelum ada peringkat
- Travaux D'Extension de Port Est - Phase 2 (Île de La Reunion)Dokumen8 halamanTravaux D'Extension de Port Est - Phase 2 (Île de La Reunion)Mahdi FekiBelum ada peringkat
- Calcul Des Bobinages Pour La ProductionDokumen53 halamanCalcul Des Bobinages Pour La ProductionbouxBelum ada peringkat
- 2.1.6 L Épi Et Son Musoir L ÉpiDokumen50 halaman2.1.6 L Épi Et Son Musoir L ÉpiFeki MahdiBelum ada peringkat
- Diagnostic Des Ouvrages PortuairesDokumen10 halamanDiagnostic Des Ouvrages PortuairesABID MohamedBelum ada peringkat
- Comportement Des Pieux Sous Chargement Cyclique - Cas Des Sables .Dokumen8 halamanComportement Des Pieux Sous Chargement Cyclique - Cas Des Sables .bockouBelum ada peringkat
- SFT Design Manual A4 French 2019Dokumen60 halamanSFT Design Manual A4 French 2019saint2012Belum ada peringkat
- Etat Des Connaissances Sur Le Dimensionnement Des Évacuateurs de Crue Des BarragesDokumen33 halamanEtat Des Connaissances Sur Le Dimensionnement Des Évacuateurs de Crue Des BarragesAhmed BouikiouchBelum ada peringkat
- Revue Le Génie Civil N°2000 Du 11 Décembre 1920Dokumen10 halamanRevue Le Génie Civil N°2000 Du 11 Décembre 1920Jean Louis GragnicBelum ada peringkat
- 37095227Dokumen956 halaman37095227arthur ndoiBelum ada peringkat
- Annexe 5 Rapport Dimplantation EdimamelDokumen23 halamanAnnexe 5 Rapport Dimplantation EdimamelMohamed Taher FechkeurBelum ada peringkat
- s4 - Ue4 - Genie Cotier - Ecue1 - Travaux Maritimes Et Structures OffshoresDokumen62 halamans4 - Ue4 - Genie Cotier - Ecue1 - Travaux Maritimes Et Structures OffshoresJaphet AbaloBelum ada peringkat
- INTRODUCTIONDokumen4 halamanINTRODUCTIONAhmed ChahineBelum ada peringkat
- Techniquesdeforage Cours2017Dokumen13 halamanTechniquesdeforage Cours2017Ciel Bleu100% (1)
- Bapteme Du Seigneur-2Dokumen2 halamanBapteme Du Seigneur-2Anna toukamBelum ada peringkat
- Design 13112002Dokumen96 halamanDesign 13112002Kiki Riki Miki100% (1)
- Noha HaouchDokumen2 halamanNoha HaouchNoha HAOUCHBelum ada peringkat
- Chemin de Croix Du Temps de Carême 2024Dokumen88 halamanChemin de Croix Du Temps de Carême 2024osvaldoBelum ada peringkat
- Corrige E2 Juin 2009Dokumen26 halamanCorrige E2 Juin 2009Houcine RtimiBelum ada peringkat
- Examen de Contrôle 2015 - M1-Evaluation & Fusions (Enoncé Et Corrigé)Dokumen5 halamanExamen de Contrôle 2015 - M1-Evaluation & Fusions (Enoncé Et Corrigé)kais kaBelum ada peringkat
- 3300 StasDokumen11 halaman3300 Stasimmobilière providenceBelum ada peringkat
- Groupe Électrogène Diesel Industriel - 50 HZ: Caractéristiques Générales KOHLER, Haute QualitéDokumen9 halamanGroupe Électrogène Diesel Industriel - 50 HZ: Caractéristiques Générales KOHLER, Haute QualitéMohamed Bachir EL GHRIBBelum ada peringkat
- TP1 Banc Hydraulique Volumetrique: - IntroductionDokumen3 halamanTP1 Banc Hydraulique Volumetrique: - Introductionzaidzd8Belum ada peringkat
- Cours Optique Chap 2Dokumen14 halamanCours Optique Chap 2Sellé GueyeBelum ada peringkat
- Corr QUIZ 1Dokumen10 halamanCorr QUIZ 1slim yaichBelum ada peringkat
- Chap1 - Fiche 4 - Les Hommes Et La Societe Durant La Revolution IndustrielleDokumen3 halamanChap1 - Fiche 4 - Les Hommes Et La Societe Durant La Revolution IndustrielleLamine Mane SaneBelum ada peringkat
- Correcteur PIDDokumen8 halamanCorrecteur PIDSalem FaresBelum ada peringkat
- Correction TD ch2013Dokumen2 halamanCorrection TD ch2013MohamedAbidaBelum ada peringkat
- F32 - Construction de TrottoirsDokumen18 halamanF32 - Construction de TrottoirsreefreefBelum ada peringkat
- Fiche Extraction DentaireDokumen2 halamanFiche Extraction DentaireFzBelum ada peringkat
- P251 Activités DétailléesDokumen10 halamanP251 Activités DétailléesAsma LakhalBelum ada peringkat
- Harnais de SécuritéDokumen1 halamanHarnais de SécuritéLiban AimoulBelum ada peringkat
- PaddAn2 PaddAn2 - Vocabulaire Mathématiques - Calcul de BaseDokumen24 halamanPaddAn2 PaddAn2 - Vocabulaire Mathématiques - Calcul de BasePaddAn2 PaddAn2Belum ada peringkat
- PFE PPT Marketing Digital V01Dokumen36 halamanPFE PPT Marketing Digital V01tben innovationBelum ada peringkat
- Bakhtine Le Roman Et L IntertexteDokumen34 halamanBakhtine Le Roman Et L IntertexteKyle LloydBelum ada peringkat
- Blindage FB4+Dokumen51 halamanBlindage FB4+Walid DridiBelum ada peringkat
- Le SecourismeDokumen2 halamanLe SecourismeHilaire Benjamin Amba adiyiBelum ada peringkat
- Rapport de StageDokumen57 halamanRapport de StageTãdj ĘddïnėBelum ada peringkat