Anda mungkin juga menyukai
- Solutions To Irodov's Problems - Volume IIDokumen442 halamanSolutions To Irodov's Problems - Volume IIZequinha de Abreu100% (2)
- Me 482 ENERGY CONSERVATION AND MANAGENET Text Book Prepared by Faris KK FOR KTU S8Dokumen103 halamanMe 482 ENERGY CONSERVATION AND MANAGENET Text Book Prepared by Faris KK FOR KTU S8vpzfaris85% (13)
- Total Harmonic DistortionDokumen4 halamanTotal Harmonic DistortionVivek KaushikBelum ada peringkat
- Easy(er) Electrical Principles for General Class Ham License (2019-2023)Dari EverandEasy(er) Electrical Principles for General Class Ham License (2019-2023)Belum ada peringkat
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1Dari EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1Belum ada peringkat
- Hawking-Brief History of TimeDokumen336 halamanHawking-Brief History of TimeAlbert Kristian0% (1)
- Passive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2Dari EverandPassive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2Belum ada peringkat
- EIS BoukampDokumen97 halamanEIS BoukampMiraldaBelum ada peringkat
- NEC Article 250Dokumen42 halamanNEC Article 250unknown_3100% (1)
- Max Born, Albert Einstein-The Born-Einstein Letters-Macmillan (1971)Dokumen132 halamanMax Born, Albert Einstein-The Born-Einstein Letters-Macmillan (1971)Brian O'SullivanBelum ada peringkat
- EE206 Material ScienceDokumen2 halamanEE206 Material Sciencevpzfaris50% (2)
- Feynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterDari EverandFeynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterBelum ada peringkat
- Disclosure To Promote The Right To InformationDokumen22 halamanDisclosure To Promote The Right To InformationJGD123Belum ada peringkat
- Power Electronics - Chapter 3Dokumen50 halamanPower Electronics - Chapter 3av_00115240100% (8)
- Half Wave Rectifiers ExplainedDokumen68 halamanHalf Wave Rectifiers ExplaineddeivaBelum ada peringkat
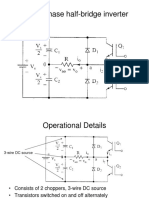
- Single Phase Half Bridge InverterDokumen29 halamanSingle Phase Half Bridge InverterGnanaseharan Arunachalam100% (1)
- Singer Basic Tote Bag: Shopping ListDokumen5 halamanSinger Basic Tote Bag: Shopping ListsacralBelum ada peringkat
- Fundamentals of Neural Networks by Laurene FausettDokumen476 halamanFundamentals of Neural Networks by Laurene Fausettsivakumar89% (18)
- Qualcomm LTE Performance & Challenges 09-01-2011Dokumen29 halamanQualcomm LTE Performance & Challenges 09-01-2011vembri2178100% (1)
- Clamp MeterDokumen3 halamanClamp MetervpzfarisBelum ada peringkat
- MAINTAIN COOLANT LEVELDokumen6 halamanMAINTAIN COOLANT LEVELAgustin BerriosBelum ada peringkat
- Create an access point for non-RouterOS laptop clientsDokumen8 halamanCreate an access point for non-RouterOS laptop clientsGorgeus WaffleBelum ada peringkat
- Ac To DC Conversion (Rectifier) : Power Electronics and Drives (Version 3-2003), Dr. Zainal Salam, 2003 1Dokumen41 halamanAc To DC Conversion (Rectifier) : Power Electronics and Drives (Version 3-2003), Dr. Zainal Salam, 2003 1İbrahim KayğanBelum ada peringkat
- AC to DC Conversion TechniquesDokumen40 halamanAC to DC Conversion Techniquesrahmanrestu33% (3)
- Ac To DC Conversion (Rectifier) : Power Electronics and Drives (Version 3-2003), Dr. Zainal Salam, 2003 1Dokumen41 halamanAc To DC Conversion (Rectifier) : Power Electronics and Drives (Version 3-2003), Dr. Zainal Salam, 2003 1hdrzaman9439Belum ada peringkat
- Diode PDFDokumen37 halamanDiode PDFgleensolis100% (1)
- Simple and Accurate Formula For Calculating The Conduction Angle of Single Phase RectifierDokumen3 halamanSimple and Accurate Formula For Calculating The Conduction Angle of Single Phase RectifierMichele Oconnor0% (1)
- UNIT II - PE - Control - 1PFWRectifiers PDFDokumen24 halamanUNIT II - PE - Control - 1PFWRectifiers PDFramaBelum ada peringkat
- Dioda Beban RDokumen10 halamanDioda Beban RDamar Putra BriliawanBelum ada peringkat
- 2 Diode RectifierDokumen63 halaman2 Diode RectifierKaltoum Robleh jiirBelum ada peringkat
- CH 09Dokumen66 halamanCH 09Praveen Kumar Kilaparthi0% (1)
- Power Electronics Rectifier FundamentalsDokumen59 halamanPower Electronics Rectifier FundamentalsTàu NguyễnBelum ada peringkat
- Lec 9Dokumen27 halamanLec 9ahmed ragabBelum ada peringkat
- Chapter 8Dokumen48 halamanChapter 8hamzaBelum ada peringkat
- Transmission Lines in Frequency Domain and Space DomainDokumen38 halamanTransmission Lines in Frequency Domain and Space DomainDeepak MakhijaBelum ada peringkat
- Chopper Basic PDFDokumen12 halamanChopper Basic PDFSoumya DuttaBelum ada peringkat
- AC Controller R-L Load Fourier AnalysisDokumen9 halamanAC Controller R-L Load Fourier AnalysisDicky DarmawanBelum ada peringkat
- 20 - L-9 (DK) (Pe) ( (Ee) Nptel)Dokumen1 halaman20 - L-9 (DK) (Pe) ( (Ee) Nptel)GagneBelum ada peringkat
- MK Elda PenyearahTerkendali2017Dokumen51 halamanMK Elda PenyearahTerkendali2017satryaBelum ada peringkat
- Analog Electronics Lecture-27-21032024 (2)Dokumen24 halamanAnalog Electronics Lecture-27-21032024 (2)Sayam SanchetiBelum ada peringkat
- Module 2Dokumen21 halamanModule 2Anandu DipukumarBelum ada peringkat
- Transmission Lines by Sarthak SinghalDokumen46 halamanTransmission Lines by Sarthak SinghalPratibha YadavBelum ada peringkat
- Chapter 1-Part 1: Half-Wave RectifiersDokumen50 halamanChapter 1-Part 1: Half-Wave RectifiersWeehao SiowBelum ada peringkat
- Where Do You Need This?: 1.maintenance Engineer 2.energy Management System 3.energy ManagerDokumen46 halamanWhere Do You Need This?: 1.maintenance Engineer 2.energy Management System 3.energy Managerconference RequirementsBelum ada peringkat
- EE3104 - L1 TL and Telegrapher EquationDokumen29 halamanEE3104 - L1 TL and Telegrapher EquationDerek WangBelum ada peringkat
- Half Wave Rectifier With Mathematical AnalysisDokumen13 halamanHalf Wave Rectifier With Mathematical AnalysisKJMWebsite.xyz100% (9)
- Lecture 3Dokumen12 halamanLecture 3geofrey fungoBelum ada peringkat
- Lec01 1Dokumen63 halamanLec01 1awabnasirahmednasirBelum ada peringkat
- Diode RectifiersDokumen32 halamanDiode RectifiersMahmoud AfifyBelum ada peringkat
- محاضرة الاسبوع الاولDokumen7 halamanمحاضرة الاسبوع الاولMohammad alhaboob2030Belum ada peringkat
- 1.15.crystal Diode As A Rectifier:: Is Zero. Both The Load Voltage and Current Are of Are Shown in Figure 1.29Dokumen10 halaman1.15.crystal Diode As A Rectifier:: Is Zero. Both The Load Voltage and Current Are of Are Shown in Figure 1.29Robert EvansBelum ada peringkat
- EEE 1287-Fall 2019-Topic 07Dokumen46 halamanEEE 1287-Fall 2019-Topic 07Ahnaf AmerBelum ada peringkat
- CHAP3.Arus Bolak BalikDokumen35 halamanCHAP3.Arus Bolak BalikOmi Luthfia RahmanBelum ada peringkat
- AC Voltage Controller Classification and Control StrategiesDokumen6 halamanAC Voltage Controller Classification and Control StrategiesTuhin ShahBelum ada peringkat
- Basics: TOPIC: (2) There Are Two Scinario We Will Encounter in The Network TheoryDokumen9 halamanBasics: TOPIC: (2) There Are Two Scinario We Will Encounter in The Network TheorynaveensilveriBelum ada peringkat
- Half Wave and Full Wave RectifiersDokumen5 halamanHalf Wave and Full Wave RectifiersRajesh PylaBelum ada peringkat
- Homework 1Dokumen8 halamanHomework 1Yooncheul JeungBelum ada peringkat
- 15 - L-9 (DK) (Pe) ( (Ee) Nptel)Dokumen1 halaman15 - L-9 (DK) (Pe) ( (Ee) Nptel)GagneBelum ada peringkat
- Selection of SCR Rating For Fully Controlled Rectifier: - Prepared ByDokumen11 halamanSelection of SCR Rating For Fully Controlled Rectifier: - Prepared ByRahul SinghBelum ada peringkat
- DT - NU-EEE342-Lecture 3-Transmission Lines 2017 PDFDokumen54 halamanDT - NU-EEE342-Lecture 3-Transmission Lines 2017 PDFSabit ShaihollaBelum ada peringkat
- AC CIRCUITS FORMULAEDokumen11 halamanAC CIRCUITS FORMULAEjayaditya soniBelum ada peringkat
- EEL 5245 Non-Isolated DC-DC Converters Effects of Non-IdealitiesDokumen8 halamanEEL 5245 Non-Isolated DC-DC Converters Effects of Non-IdealitiesCentvie Joie F. AlbeosBelum ada peringkat
- 05 Applications of DiodesDokumen46 halaman05 Applications of Diodes陳浚維Belum ada peringkat
- Alternating Current RL Circuits: 1 ObjectivesDokumen7 halamanAlternating Current RL Circuits: 1 ObjectivesElliott M.Belum ada peringkat
- PDO Course 2Dokumen67 halamanPDO Course 21MM1R HL'Belum ada peringkat
- Section 2: Power System Mathematics and Physics, Three-Phase, Power FactorDokumen65 halamanSection 2: Power System Mathematics and Physics, Three-Phase, Power FactorKhuram TabassomBelum ada peringkat
- Symmetrical and Unsymmetrical FaultsDokumen27 halamanSymmetrical and Unsymmetrical FaultsHassan LalaBelum ada peringkat
- Single-phase half-bridge inverter operational details and analysisDokumen31 halamanSingle-phase half-bridge inverter operational details and analysistintuvrBelum ada peringkat
- Lec 11Dokumen42 halamanLec 11ahmed ragabBelum ada peringkat
- AC circuit analysis using impedanceDokumen38 halamanAC circuit analysis using impedanceLabib RaFiBelum ada peringkat
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Dari EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Belum ada peringkat
- 3 Sidor Från Digital Protection For Power SystemsDokumen21 halaman3 Sidor Från Digital Protection For Power SystemsManirajPerumalBelum ada peringkat
- CII User ManualDokumen51 halamanCII User Manualabhinavgiri17Belum ada peringkat
- Lecture NotesDokumen1 halamanLecture NotesHassan SayedBelum ada peringkat
- Self Study Report of Charak College of PharmacyDokumen137 halamanSelf Study Report of Charak College of PharmacyvpzfarisBelum ada peringkat
- EE403 Exam Questions Cover Key Smart Grid TopicsDokumen4 halamanEE403 Exam Questions Cover Key Smart Grid TopicsvpzfarisBelum ada peringkat
- Emd First Module PDFDokumen35 halamanEmd First Module PDFvpzfarisBelum ada peringkat
- M6-EE409 Electrical Machine Design NotesDokumen7 halamanM6-EE409 Electrical Machine Design NotesvpzfarisBelum ada peringkat
- 5C014C64F1709Dokumen1 halaman5C014C64F1709vpzfarisBelum ada peringkat
- 2017 Current AffairsDokumen11 halaman2017 Current AffairsvpzfarisBelum ada peringkat
- Speed Control of Wound Rotor Induction Motor Using Rotor Resistance ControlDokumen5 halamanSpeed Control of Wound Rotor Induction Motor Using Rotor Resistance ControlvpzfarisBelum ada peringkat
- EC 307 Power Electronics and Instrumentation Lecture Notes, Module 6Dokumen21 halamanEC 307 Power Electronics and Instrumentation Lecture Notes, Module 6vpzfaris100% (1)
- DC Motors and Generatos QuestionsDokumen2 halamanDC Motors and Generatos QuestionsvpzfarisBelum ada peringkat
- GO (P) No 07-2016-Fin Dated 20.01.16 With Index PDFDokumen359 halamanGO (P) No 07-2016-Fin Dated 20.01.16 With Index PDFvpzfarisBelum ada peringkat
- Model Question Paper on High Voltage EngineeringDokumen3 halamanModel Question Paper on High Voltage EngineeringvpzfarisBelum ada peringkat
- Experiment No. 1 Load Test On Squirrel Cage Induction MotorDokumen1 halamanExperiment No. 1 Load Test On Squirrel Cage Induction MotorvpzfarisBelum ada peringkat
- Calicut University ECE Scheme and Syllabus 2009Dokumen132 halamanCalicut University ECE Scheme and Syllabus 2009Akhil Paul VBelum ada peringkat
- Network Theory EC201 NoteDokumen70 halamanNetwork Theory EC201 NotevpzfarisBelum ada peringkat
- Air Bearing 1Dokumen1 halamanAir Bearing 1vpzfarisBelum ada peringkat
- EE333 Electrical Machines Lab IIDokumen2 halamanEE333 Electrical Machines Lab IIvpzfarisBelum ada peringkat
- Calicut University ECE Scheme and Syllabus 2009Dokumen132 halamanCalicut University ECE Scheme and Syllabus 2009Akhil Paul VBelum ada peringkat
- AKTU Academic Calendar for BTech Even Semester January-July 2017Dokumen2 halamanAKTU Academic Calendar for BTech Even Semester January-July 2017AkshayGovindBelum ada peringkat
- Course Plan EnergyDokumen8 halamanCourse Plan EnergyvpzfarisBelum ada peringkat
- Al-ameen Engineering College Computer Lab SpecsDokumen1 halamanAl-ameen Engineering College Computer Lab SpecsvpzfarisBelum ada peringkat
- Benefits of Power FactorDokumen7 halamanBenefits of Power FactorNitin SundriyalBelum ada peringkat
- Scheme - and - Syl - Electronics - and - Electrical - 2014 1 PDFDokumen127 halamanScheme - and - Syl - Electronics - and - Electrical - 2014 1 PDFvpzfarisBelum ada peringkat
- What Is Electron MicrosDokumen6 halamanWhat Is Electron MicrosvpzfarisBelum ada peringkat
- Lab Manual MCSE 101Dokumen35 halamanLab Manual MCSE 101Juan JacksonBelum ada peringkat
- Wsat200 RamsaDokumen12 halamanWsat200 RamsaAndy ColeBelum ada peringkat
- How Dna Controls The Workings of The CellDokumen2 halamanHow Dna Controls The Workings of The Cellapi-238397369Belum ada peringkat
- Ibrahim Zeid: RsrecialDokumen96 halamanIbrahim Zeid: RsrecialengrodeBelum ada peringkat
- Geotehnical Engg. - AEE - CRPQsDokumen48 halamanGeotehnical Engg. - AEE - CRPQsSureshKonamBelum ada peringkat
- Line and Circle Drawing AlgorithmsDokumen57 halamanLine and Circle Drawing AlgorithmsMILAN K JAIN B.Tech CSE B 2018-2022Belum ada peringkat
- ITTC Validation of ManoeuvringDokumen11 halamanITTC Validation of ManoeuvringFelipe IlhaBelum ada peringkat
- ABC-S Plus Web Info '08Dokumen4 halamanABC-S Plus Web Info '08anon-331232Belum ada peringkat
- FTP FUNCTION MODULE in ABAPDokumen8 halamanFTP FUNCTION MODULE in ABAPAdriano PermanaBelum ada peringkat
- Propeller forces and typesDokumen2 halamanPropeller forces and typesEdison Gutierrez CapunoBelum ada peringkat
- The Professional DesktopDokumen318 halamanThe Professional Desktopalintuta2Belum ada peringkat
- AND Optimization OF Three Existing Ethylbenzene Dehydrogenation Reactors in SeriesDokumen5 halamanAND Optimization OF Three Existing Ethylbenzene Dehydrogenation Reactors in SeriesMuhammad Ridwan TanjungBelum ada peringkat
- Self Report QuestionnaireDokumen6 halamanSelf Report QuestionnaireMustafa AL ShlashBelum ada peringkat
- Network Layer: Computer Networking: A Top Down ApproachDokumen83 halamanNetwork Layer: Computer Networking: A Top Down ApproachMuhammad Bin ShehzadBelum ada peringkat
- College of Information Technology Dmmmsu-Mluc City of San FernandoDokumen9 halamanCollege of Information Technology Dmmmsu-Mluc City of San FernandoZoilo BagtangBelum ada peringkat
- Baidu - LeetCodeDokumen2 halamanBaidu - LeetCodeSivareddyBelum ada peringkat
- ID Pengaruh Persistensi Laba Alokasi Pajak Antar Periode Ukuran Perusahaan PertumbuDokumen21 halamanID Pengaruh Persistensi Laba Alokasi Pajak Antar Periode Ukuran Perusahaan PertumbuGheaMarisyaPuteriBelum ada peringkat
- VLSI Design: Introduction & Motivation Introduction & MotivationDokumen33 halamanVLSI Design: Introduction & Motivation Introduction & MotivationPriyanka SharmaBelum ada peringkat
- DbintfcDokumen80 halamanDbintfchnr.uninstallBelum ada peringkat
- 10th Term Exams Computer Science PaperDokumen2 halaman10th Term Exams Computer Science PaperMohammad Tariq JavaidBelum ada peringkat