United States Patent 1
Horvath —
[54] ARTIFICIAL HAND.
‘Eduard Horvath, Vienna, Austria
‘Otto Bock Orthopiidische Industrie
KG, Duderstadt, Fed. Rep. of
175] Inventor:
[73] Assignee:
Germany
[21] ApplNo: 226,613
[22] PCT Filed: May 20, 1980
[86] PCT No. PCT/ATS0/00015
§371 Date: Jas, 24, 1981
§ 102(@) Date: Jan. 21, 1981
[87] PCT Pub. No: W080/02500
PCT Pub, Date: Nov. 27, 1980
[30] Foreign Application Priority Data
May 21, 1979 [AT] Austria 1 3138/79
[51] Int. cl AGIF 1/06; B25) 15/00
[2] us.c. 294/106; 3/12.7;
3/128
[58] Field of Search 294/86 R, 88, 106;
3/12, 12.4, 12.6-12.8; 414/732, 735, 739, 744 A,
753
(36) References Cited
U.S. PATENT DOCUMENTS
2449,728 9/1948. Snethun sine
21668989 2/1954. Sargesom son nrnannn 3/126
Best Avatiabletopy __ 5]
an 4,377,308
Mar. 22, 1983
1/1966 Lemelson ..
471965. Nevmeier ©
see $14/739
on M1478
3263535, Zurcher 94/106 X
3312496, Boutelle et 294/88 X
362,548, Rowe 294/106 X
3,509,583 Friol 44/5 X
35572807 3/1971 Hasker t al 294/105,
3,692,161 9/1972. Katsuren etal agsi36 X.
3927424 12/1975 toh 294/106 X
3.952880 4/1976 Hill eta 294/106 X
$149,278 4/1979 Frosch et enna VIDS
FOREIGN PATENT DOCUMENTS
697518 11/1964 Canada 294/106
1296752. 5/1962. France 3/128
Primary Examiner—Johnny D. Cherry
Attorney, Agent, or Firm—Kacl F, Ross; Herbert Dubno
(7) ABSTRACT
This hand is provided with two clamping jaws (1,2)
movable toward or respectively apart from each other,
each of which is mounted in each case to a hinge quad
rangle (3, 4). At each clamping jaw (1, 2) there is sup-
ported a gripping plate (8 9) titable around an axis (5,
6) vertical to the jaw axis. The two hinge quadrangles
G,4) can be rotatably supported jointly by an axis run-
ning parallel to the hinge axes of the hinge quadrangles
@, 4), however, also the two hinge quadrangles can be
Jointly tltable around one axis, which runs vertical 10
the hinge axes (FIG. 3).
8 Claims, 6 Drawing Figures
U.S. Patent — Mar. 22, 1983 Sheet 1 of 4 4,377,305
igs
A 10
\ LZ ca
ATA
A FT noe
:
U.S. Patent — Mar. 22, 1983 Sheet 2 of 4 4,377,305
U.S. Patent Mar. 22, 1983 Sheet 3 of 4 4,377,305
U.S. Patent Mar. 22, 1983 Sheet 4 of 4 4,377,305
a
oo AT
VA \ 2 a
x
\ ot
ty,
4,377,305
1
ARTIFICIAL HAND
‘CROSS REFERENCE TO RELATED
"APPLICATION
This application is a national phase application of
PCT application PCT/AT80/00015 filed May 25, 1980
and based upon Austrian application Ser. No. A
3735/19 filed May 21, 1979 under The International
Convention.
FIELD OF THE INVENTION
‘The invention relates to an artificial hand, which is
provided with two clamping jaws or the like movable
towards each other and away from each other for grip-
ping of objects. Each clamping jaw is mounted to a
hinge quadrangle and more particular to 2 hingeparal-
lelogram.
OBJECT OF THE INVENTION
Itis an object of the invention to form such a hand so
that the object gripped (after the gripping) can be
brought into as many different positions as possible.
SUMMARY OF THE INVENTION
This object is achieved with an artificial hand having
a gripping plate, preferably provided with a groove, at
each clamping jaw, the gripping plate being tiltable
round an axis perpendicular to the plane of the jaw.
‘The two hinge quadrangles can be tilted jointly around
an axis which is parallel to the hinge axes of the hinge
‘quadrangles or the two hinge quadrangles can be jointly
tiltable by preferably 180° around an axis directed per~
pendicularly to the hinge axis, The tiltable disposition of
the gripper plate at the clamping jaws allows the
gripped object to be brought into arbitrary positions
‘within the tilting range in a plane parallel to the clamp-
ing jaws. If in addition the two hinge quadrangles
Jointly are tiltable around a joint axis directed parallel to
the hinge axes of the hinge quadrangles, then the plane
of the gripper plates is itself titable. In addition or in-
stead of providing tiltability of the two hinge quadran-
ales around the axis directed parallel to the hinge axes,
the two hinge quadrangles can also be jointly tiltable
around an axis directed perpendicular to the hinge axes
and it allows for movability to place a gripped object in
‘additional spacial positions
‘A constructive simplification of the construction of
‘the gripping hand and additional advantageous relations
for the control of the high clamping forces by only
small parts is achieved, if the axis parallel to the hinge
axes, around which axis the two hinge parallelograms
are jointly tltabl, is also an ideal hinge axis belonging
to both jointly. A ring can be disposed concentrically 10
this axis which carries an additional hinge axis of the
hinge parallelograms and the parallelogram are guided
rotatably on the ring, for example by circular bearings
disposed concentrically to the ring.
Tn order to achieve a simply constructed drive for the
clamping of an object there can be provided 2s an addi
tional feature of the invention a pinion at the drive for
the tilting together of apart of the of the two hinge
quadrangles. The pinion can engage at the same time
two toothed segments, one of which is attached to the
‘guide of each hinge quadrangle.
‘A preferred further feature comprises in this case that
‘a motor with a drive is provided along the axis, which
drives via a gearwhee! the pinion along the axis and in
10
5
20
‘s
50
ss
6s
2
Particular that the drive disposed along the axis is
switchable such that as desired the pinion or the ring,
‘can be driven.
In another embodiment of the invention there is pro-
vided for a pure manual operation a manual drive such
asa handwheel for tilting of the two clamping plates or
for the joint rotation of the hinge quadrangles around
the axis,
It is an advantage for the practical handling, if in @
practical embodiment of the invention one of the grip.
per plates is drivable by a motor and preferably by a
bevel gear drive, whereas the other gripper plate is
displaced by an abject clamped between the two grip
per plates, for example engaging in grooves of the two
ripper plates.
Ina farther embodiment of the invention in the free
space between the clamping jaws or the hinge quadran-
gles carrying them there i provided an exchangeable
bridge covering the drive parts, which bridge prefera-
bly is provided at its upper side with grooveclike guide
surfaces
BRIEF DESCRIPTION OF THE DRAWINGS
Additional features, details and advantages of the
invention result in the following from the description by
way of two embodiments shown in the drawing; in the
drawing:
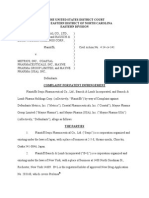
FIG. 1 is a schematic plan view of an artificial hand
in accordance with the invention;
FIG. 2 is a horizontal projection corresponding to
FIG.
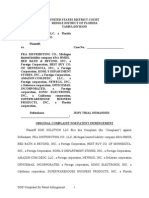
FIG. 3 isa schematic illustration of the kinematics of,
the hand in accordance with the present invention;
FIG. 4 isa detail of the region A shown in FIG. 2in
an enlarged scale; and
FIG. Sis side view and FIG. 6 sa section along line
VI-V1 of another embodiment.
SPECIFIC DESCRIPTION
‘The artificial hand in accordance with the present
invention is provided with two clamping jaws 1,2 mov-
able toward each other and away from ¢ach other.
The kinematics of the drive for the motion of these
clamping jaws 1 and 2is herein effected by hinge quad-
angles 34 (see FIG. 3), which are formed such as to
assure that the two clamping jaws 1 and 2 in each post
tion are maintained substantially parallel to each other.
In particular the hinge quadrangles 3 and 4 are formed
substantially as hinge parallelograms as can be seen
from FIG. 3.
Each clamping jaw 1 and 2 is provided with a gripper
plate 89 tiltable around an axis §,6 perpendicular to the
Jaw plane. In order to allow for good support for rod
shaped articles 23 such as lead pencils and the like by
the gripper plates & and 9, these gripper plates are pro-
vided with mutually confronting grooves 7.
‘Both hinge quadrangles 3 and 4 are jointly swingable
around an axis 10, which runs parallel to the hinge axes.
of the hinge quadrangles 3, 4.
In addition the two hinge quadrangles 3, 4 are jointly
movable around an axis 11, which runs perpendicular to
the axes of the hinge quadrangles 3, 4
‘As can be recognized from FIG. 2, the hinge quad
rangles 34 can be tilted around an axis 11 through an
angle of 180°, The gripper plates 8 and 9 can be pro-
vided with hook-like extensions to allow the gripping
4,377,305
3
hand to engage loops, eyelets and the like, which are
displaced on the objects to be manipulated.
“The axis 10, around which the two hinge quodrangles
are jointly tltable, is also one hinge axis jointly belong
{ng to the two, that is extensions of the limbs 16, 17 run
through this axis 10 (FIG. 3). A ring 12 concentrically
isposed to the axis 10 is provided for receiving the
Fringe axes ofthe hinge quadrangles. The parallelogram
Jims 16, 17, which run substantially parallel to the
parallelogram limbs 15, 18 tiltably disposed relative to
the ring 12, ae tltably guided on the ring 12. For the
{guiding herein the limbs 16, 17 are provided with (in
part showa in dashed lines) rng bearings 19, 20, which
bre supported by rollers of ike bodies next to each
other.
‘As is shown in FIG. 4, one gripper plate 9 can be
driven by motor 21 via a bevel gear drive 22. The
‘other gripper plate Pis entrained by the clamped object
423 between the gripper plates 89, The two tilt axes 10
and 11, round which the
be jointly tilted, preferably intersect each other. Each
(not shown) drive, with which the two hinge quedran-
bles 3, 4can be tilted toward and away from each other
{round the axis 10, is provided with a motor with drive
and pinion 24, which at the same time engages two
toothed segments 25, 26, of which one in each case is
attached to the limb 16 and 17, respectively. Advanta-
sgeously, this drive is switchable inthe axis 10 for driv-
ing either the ring 12 or via a gearwheel 33 the pinion
24, Particularly advantageous is here the provision of a
spin-esistant drive.
In FIG. 4 the angle is designated as a with which the
svipper plates 8, 9 are tiltable around the axis 5 or re-
Spectvely 6 disposed vertical to the clamping jaws 1 or
respectively 2. This angle is preferably 90". The axis 10
running parallel to the hinge axes allows a tilting by an
langle B of the magnitade of again about 90°. The two
hinge quadrangles 3,4 can also be tilted around the axis
10.
The gripper plates 8 9 can be dismountably con-
nected, that is replaceably connected, with the elamp-
ing jaws 1,2. In order to be able to employ for special
manipulations differently formed gripper plates 8, 9,
these are attached to the clamping jaws 1, 2 by way of
‘simply disconnectable connection, such as for exam-
ple by a catch device.
In addition, a handwheel 28 is provided for titing of
the two clamping jaws 1, 2 or respectively forthe joint
tilting of the hinge quadrangles 34 around an axis 10,
‘The handwheet 28 is provided with gripping recesses
29. This handwheel 26 is rotatably supported around
the axis 10 and is coupled solidly of for each case with
the drive for the hinge quadrangles this way it allows @
manual drive or respectively a manual amplification of
the gripping force built up by this drive
‘The gearwheel drive 22 can also be replaced by a
catch provision, by the aid of which the gripper plates
8,9 are fixed in the desired position.
In the free space between the clamping plates 1, 2 or
sespectively the hinge quadrangles 3, 4 supporting them
there is removably disposed a bridge 30 in the embodi-
ment shown in FIGS. 8 and 6 above the drive parts
24,25, 26. The bridge protecs these drive pats and the
side housing parts against excessive force and damage
and is provided at its upper side with prismatic or
grooverlke guide surfaces 31 for depositing clamped,
and in particular elongated articles such asthe hammer
indicated in FIG. 6 in dot-dash lines. Important is here
0
ge quadrangles 3 and 4can 20
45
0
55
©
4
again the exchangeability of this bridge 30, which al-
lows various resting prism, additional tensioning st
faces or special functions with tool like character such
as cutting and the like, to be used.
In order to allow for releasing of a clamped in object,
which is fixed by a gripping force or by a locking mech-
anism, even in case the drive system is interrupted or is
defective, then advantageously a safety coupling not
shown can be coordinated with the drive for the hinge
quadrangles 3,4, which for example can be actuated by
a lever from the outside, whereby the two clamping
jaws 1,2 are decoupled from the drive system and
thereby become freely rotatable around the axis 10.
‘The control of the tilting motion around the axis 10
ccan be provided either actively by way of a motor and
a selfcblocking drive or by hand, wherein in the latter
cease a fixation in catch position or stepless by frictional
‘coupling can be provided.
Tlaim:
1. An artificial hand comprising:
a support rotatable about a first axis;
ring mounted on said support for rotation about a
second axis constituting the axis of said ring and
perpendicular to said first axis;
4 pair of hinge quadrangles each having a first limb
pivotally connecting the said ring for rotation
therewith, a second limb generally parallel to said
first limb and having an end displaceable along said
ring whereby extensions of said second limbs inter-
seet at said second axis whereby said quadrangles
virtually have a common pivot axis coinciding with
said second axis, and a third limb articulated to said
first and second limbs;
respective clamping jaws pivotally mounted on the
respective hinge quadrangles and tiltable relative
thereto about a respective third axis generally
transverse to a plane common to said first and
second axes, sid jaws being juxtaposed for engage
ment of objects therebetween and being displaced
toward and away from one another by swinging
movement of said second limbs toward and away
from one another; and
‘means for angularly displacing at least one of said
"jaws about the respective third axis relative to the
respective hinge quadrangle and for relatively dis-
placing said second limbs of said hinge quadr
sles.
2. The artificial hand defined in claim 1 wherein each
of said second limbs is guided on said ring by a circular
bearing disposed coaxially with said ring
‘3. The artificial hand defined in claim 2 wherein said
means for relatively displacing said limbs of said hinge
quadrangles includes a pinion and respective gear seg-
‘ments connected to said second limbs and meshing with,
said pinion.
4. The artificial hand defined in claim 2 further com-
prising drive means including a motor, a gear driven by
faid motor and a further gear rotatable about said see-
ond axis and meshing with the motor driven gear for
rotating said ring on said support about said second axis.
5. The artificial hand defined in claim 2, further com-
prising a hand wheel rotatable about said second axis
and connected with said ring for tilting same about said
second axis.
6. An artificial hand defined in claim 2 wherein said
Jaws are formed along confronting surfaces with
‘rooves engageable with said object whereby said ob-
4,377,305
5 6
{quadrangles and formed with guide surfaces for stabiliz-
ing an object held in said jaws.
said jaws. '. The artificial hand defined in claim 2 wherein said
7. The artificial hand defined in claim 2, further com- Clamping jaws are formed as gripper plates replaceably
5 mounted on the respective hinge quadrangles,
ject can entrain the other of said jaws with said one of
prising a replaceable bridge disposed between the hinge
10
2»
2s
35
55
Anda mungkin juga menyukai
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Intelligent User Interface Including A Touch Sensor Device (US Patent 8288952)Dokumen9 halamanIntelligent User Interface Including A Touch Sensor Device (US Patent 8288952)PriorSmartBelum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Richmond v. Creative IndustriesDokumen17 halamanRichmond v. Creative IndustriesPriorSmartBelum ada peringkat
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- Like Kind Card Game (US Patent 6193235)Dokumen12 halamanLike Kind Card Game (US Patent 6193235)PriorSmartBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Like Kind Money Board Table Game (US Patent 6186505)Dokumen11 halamanLike Kind Money Board Table Game (US Patent 6186505)PriorSmartBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Senju Pharmaceutical Et. Al. v. Metrics Et. Al.Dokumen12 halamanSenju Pharmaceutical Et. Al. v. Metrics Et. Al.PriorSmartBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- High-Speed Serial Linking Device With De-Emphasis Function and The Method Thereof (US Patent 7313187)Dokumen10 halamanHigh-Speed Serial Linking Device With De-Emphasis Function and The Method Thereof (US Patent 7313187)PriorSmartBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Cell Regulatory Genes, Encoded Products, and Uses Related Thereto (US Patent 7030227)Dokumen129 halamanCell Regulatory Genes, Encoded Products, and Uses Related Thereto (US Patent 7030227)PriorSmartBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- User Interface With Proximity Sensing (US Patent 8035623)Dokumen15 halamanUser Interface With Proximity Sensing (US Patent 8035623)PriorSmartBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Wine Cellar Alarm System (US Patent 8710985)Dokumen11 halamanWine Cellar Alarm System (US Patent 8710985)PriorSmartBelum ada peringkat
- Casing Spacer (US Patent 6736166)Dokumen10 halamanCasing Spacer (US Patent 6736166)PriorSmartBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Method and Apparatus For Retrieving Data From A Network Using Linked Location Identifiers (US Patent 6226655)Dokumen22 halamanMethod and Apparatus For Retrieving Data From A Network Using Linked Location Identifiers (US Patent 6226655)PriorSmartBelum ada peringkat
- VIA Technologies Et. Al. v. ASUS Computer International Et. Al.Dokumen18 halamanVIA Technologies Et. Al. v. ASUS Computer International Et. Al.PriorSmartBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Multicasting Method and Apparatus (US Patent 6434622)Dokumen46 halamanMulticasting Method and Apparatus (US Patent 6434622)PriorSmartBelum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Casino Bonus Game Using Player Strategy (US Patent 6645071)Dokumen3 halamanCasino Bonus Game Using Player Strategy (US Patent 6645071)PriorSmartBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- Advance Products & Systems v. CCI Piping SystemsDokumen5 halamanAdvance Products & Systems v. CCI Piping SystemsPriorSmartBelum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Modern Telecom Systems LLCDokumen19 halamanModern Telecom Systems LLCPriorSmartBelum ada peringkat
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Sun Zapper v. Devroy Et. Al.Dokumen13 halamanSun Zapper v. Devroy Et. Al.PriorSmartBelum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- TracBeam v. AppleDokumen8 halamanTracBeam v. ApplePriorSmartBelum ada peringkat
- TracBeam v. T-Mobile Et. Al.Dokumen9 halamanTracBeam v. T-Mobile Et. Al.PriorSmartBelum ada peringkat
- Merck Sharp & Dohme v. Fresenius KabiDokumen11 halamanMerck Sharp & Dohme v. Fresenius KabiPriorSmartBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Eckart v. Silberline ManufacturingDokumen5 halamanEckart v. Silberline ManufacturingPriorSmartBelum ada peringkat
- Perrie v. PerrieDokumen18 halamanPerrie v. PerriePriorSmartBelum ada peringkat
- Senju Pharmaceutical Et. Al. v. Metrics Et. Al.Dokumen12 halamanSenju Pharmaceutical Et. Al. v. Metrics Et. Al.PriorSmartBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- ATEN International v. Uniclass Technology Et. Al.Dokumen14 halamanATEN International v. Uniclass Technology Et. Al.PriorSmartBelum ada peringkat
- Dok Solution v. FKA Distributung Et. Al.Dokumen99 halamanDok Solution v. FKA Distributung Et. Al.PriorSmartBelum ada peringkat
- Mcs Industries v. Hds TradingDokumen5 halamanMcs Industries v. Hds TradingPriorSmartBelum ada peringkat
- GRQ Investment Management v. Financial Engines Et. Al.Dokumen12 halamanGRQ Investment Management v. Financial Engines Et. Al.PriorSmartBelum ada peringkat
- Multiplayer Network Innovations v. Konami Digital EntertainmentDokumen6 halamanMultiplayer Network Innovations v. Konami Digital EntertainmentPriorSmartBelum ada peringkat
- Merck Sharp & Dohme v. Fresenius KabiDokumen10 halamanMerck Sharp & Dohme v. Fresenius KabiPriorSmartBelum ada peringkat
- Shenzhen Liown Electronics v. Luminara Worldwide Et. Al.Dokumen10 halamanShenzhen Liown Electronics v. Luminara Worldwide Et. Al.PriorSmartBelum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)