Anda mungkin juga menyukai
- Leyes de Newton TripticoDokumen2 halamanLeyes de Newton Tripticogiovani echegaray70% (20)
- Amortiguamiento EstructuralDokumen9 halamanAmortiguamiento EstructuralWalterAmericoSichaBelum ada peringkat
- HistéresisDokumen2 halamanHistéresisErick Peñafiel100% (1)
- Sistema ElasticoDokumen13 halamanSistema ElasticokathyurbinacrespoBelum ada peringkat
- Falla Por Fatiga en Materiales PlásticosDokumen5 halamanFalla Por Fatiga en Materiales PlásticosIvan Marcelo TapiaBelum ada peringkat
- Fatiga en La Construcción de Materiales.Dokumen22 halamanFatiga en La Construcción de Materiales.Aldair Zeña SamaméBelum ada peringkat
- Guía para el análisis y solución de problemas de resistencia de materialesDari EverandGuía para el análisis y solución de problemas de resistencia de materialesBelum ada peringkat
- John - Montiel T.3 Resistencia de Los MaterialesDokumen11 halamanJohn - Montiel T.3 Resistencia de Los Materialestomas andres gonzalez mancilla100% (3)
- Actividad 4.3 - Procesos TermodinámicosDokumen9 halamanActividad 4.3 - Procesos TermodinámicosÁngel Ayala GonzalezBelum ada peringkat
- Actividad 1 Lubricacion IndDokumen11 halamanActividad 1 Lubricacion IndTamara VegaBelum ada peringkat
- Unidad 4 Resistencia de MaterialesDokumen18 halamanUnidad 4 Resistencia de MaterialesGiil Barajas Reyes100% (2)
- Metodo de Las FuerzasDokumen32 halamanMetodo de Las FuerzasJimmy Valdera SantamariaBelum ada peringkat
- NOTAS Y ADENDAS - Bloque 3 - PDFDokumen131 halamanNOTAS Y ADENDAS - Bloque 3 - PDFALBERTO LAGO ANEIROSBelum ada peringkat
- Práctica N°6 - Carga y Descarga en Acero Laminado Al Calor - Grupo 6Dokumen34 halamanPráctica N°6 - Carga y Descarga en Acero Laminado Al Calor - Grupo 6César Camilo Grefa ValenciaBelum ada peringkat
- HISTERESISDokumen33 halamanHISTERESISRuben Ñahue RimacheBelum ada peringkat
- Deformación simple: conceptos y diagrama tensión-deformaciónDokumen12 halamanDeformación simple: conceptos y diagrama tensión-deformaciónjoancri mozonBelum ada peringkat
- Informe Termofluencia y Viscoelasticidad (Capítulo 15)Dokumen22 halamanInforme Termofluencia y Viscoelasticidad (Capítulo 15)Ximena Alarcón ChirinosBelum ada peringkat
- MARI E. Los Vidrios Cap 10 y 11Dokumen15 halamanMARI E. Los Vidrios Cap 10 y 11Carla GorbalanBelum ada peringkat
- Termofluencia y rotura bajo tensión: ensayos y curvasDokumen7 halamanTermofluencia y rotura bajo tensión: ensayos y curvasNacho ConsolaniBelum ada peringkat
- Tema 6 GuionDokumen7 halamanTema 6 GuionAngel RamirezBelum ada peringkat
- Comportamiento y Propiedades de Los MaterialesDokumen11 halamanComportamiento y Propiedades de Los MaterialesFrank EspBelum ada peringkat
- Tengo Sueño AmiguitosDokumen20 halamanTengo Sueño AmiguitosJose Luis Gomez HuamaniBelum ada peringkat
- Criterios fluencia materialesDokumen10 halamanCriterios fluencia materialesSalvador Hernandez ColoradoBelum ada peringkat
- 3er Parcial V2Dokumen7 halaman3er Parcial V2Carlos ErickBelum ada peringkat
- Ensayo de Fluencia o Ensayo CreepDokumen3 halamanEnsayo de Fluencia o Ensayo CreepIGNACIO JAVIER MACHUCA VALDIVIABelum ada peringkat
- 11 - Termofluencia y FatigaDokumen6 halaman11 - Termofluencia y Fatigamatias.coppaBelum ada peringkat
- Texto Narrativo - 1Dokumen25 halamanTexto Narrativo - 1HTHumanityBelum ada peringkat
- S3 Interactivo Microactividad Profundizacion Acc Resmt1202Dokumen7 halamanS3 Interactivo Microactividad Profundizacion Acc Resmt1202Valeria CoronadoBelum ada peringkat
- Materiales 3er ParcialDokumen12 halamanMateriales 3er ParcialCarlos ErickBelum ada peringkat
- Módulo de Elasticidad de Young y VolumétricoDokumen3 halamanMódulo de Elasticidad de Young y VolumétricoRobinson Ferney Morales Zapata estudianteBelum ada peringkat
- Choq térmico materialesDokumen4 halamanChoq térmico materialesjaumeBelum ada peringkat
- Esfuerzo y Deformación Carga AxialDokumen17 halamanEsfuerzo y Deformación Carga AxialThalia MorelBelum ada peringkat
- Impacto DinamicoDokumen14 halamanImpacto DinamicoJoel Galarza ArroyBelum ada peringkat
- TP 3 - Deformación - Acritud y Recocido - 2014Dokumen7 halamanTP 3 - Deformación - Acritud y Recocido - 2014Federico Nicolas GirabelBelum ada peringkat
- Termofluencia, esfuerzos residuales y alivio de esfuerzosDokumen13 halamanTermofluencia, esfuerzos residuales y alivio de esfuerzosAlejandroBelum ada peringkat
- Criterios de Falla 2018Dokumen62 halamanCriterios de Falla 2018Romy GarcíaBelum ada peringkat
- Unidad 3-1 FatigaDokumen9 halamanUnidad 3-1 FatigaSagr DJBelum ada peringkat
- Deformacion PlasticaDokumen11 halamanDeformacion PlasticarichardBelum ada peringkat
- Informe TermofluenciaDokumen24 halamanInforme TermofluenciaRomero MarsBelum ada peringkat
- Propiedades mecánicas materiales tensiónDokumen23 halamanPropiedades mecánicas materiales tensiónShaka TrancebellakoBelum ada peringkat
- Plasticidad (Mecánica de Sólidos)Dokumen9 halamanPlasticidad (Mecánica de Sólidos)ROBINSON YONI CONDORI CONDORIBelum ada peringkat
- Unidad 3 Mecanica de Materiales E7Dokumen7 halamanUnidad 3 Mecanica de Materiales E7Adriana CalderonBelum ada peringkat
- PROPIEDADES TÉRMICAS JenyyDokumen10 halamanPROPIEDADES TÉRMICAS JenyyPaulDennisBelum ada peringkat
- Evidencia UA2-1Dokumen38 halamanEvidencia UA2-1JOSE ANGEL MORENO TRUJEQUEBelum ada peringkat
- Descripcion Teorica Del Modulo de Rigidez e Histeresis MecanicaDokumen13 halamanDescripcion Teorica Del Modulo de Rigidez e Histeresis MecanicaEnrique CalderónBelum ada peringkat
- Fatiga introducciónDokumen12 halamanFatiga introducciónmatias.coppaBelum ada peringkat
- Modulo de Elesticidad VolumetricaDokumen10 halamanModulo de Elesticidad VolumetricaJAMES MONTESINOSBelum ada peringkat
- Monografia Grupo Fisica m3 s1Dokumen14 halamanMonografia Grupo Fisica m3 s11703231024Belum ada peringkat
- Formato Lectura TécnicaDokumen16 halamanFormato Lectura TécnicaErick GonzalezBelum ada peringkat
- ACTIVIDAD 11 Rapidez de DeformaciónDokumen4 halamanACTIVIDAD 11 Rapidez de DeformaciónKaterine CamachoBelum ada peringkat
- Unidad I Seccion 2Dokumen8 halamanUnidad I Seccion 2Servicios Integrales Global CenterBelum ada peringkat
- Teoría de Falla para MaterialesDokumen14 halamanTeoría de Falla para MaterialesmotaBelum ada peringkat
- Behavior of Materials Under Conditions of Thermal StressDokumen82 halamanBehavior of Materials Under Conditions of Thermal Stressomar900314Belum ada peringkat
- Act F2 Cargas de Impacto y FatigaDokumen15 halamanAct F2 Cargas de Impacto y FatigaJulio ValdezBelum ada peringkat
- AmortiguamientoDokumen7 halamanAmortiguamientoFer Jimenez FigueroaBelum ada peringkat
- Fatiga en Materiales-Investigacion PDFDokumen10 halamanFatiga en Materiales-Investigacion PDFAndrea BanderaBelum ada peringkat
- Trabajo 2 Meta MecanicaDokumen7 halamanTrabajo 2 Meta MecanicaMoisés CoroseoBelum ada peringkat
- Propiedades Mecanicas Polimeros-1Dokumen8 halamanPropiedades Mecanicas Polimeros-1LizRdzBelum ada peringkat
- Diagrama Tensio Deformacio AcerDokumen1 halamanDiagrama Tensio Deformacio AcerIrieix costaBelum ada peringkat
- Practica 3 Lab MM 1862024Dokumen7 halamanPractica 3 Lab MM 1862024Jesus MontantesBelum ada peringkat
- Propiedades no mecánicas de los materiales de construcciónDokumen24 halamanPropiedades no mecánicas de los materiales de construcciónluis alejandro molina lopezBelum ada peringkat
- TRIBOLOGIADokumen27 halamanTRIBOLOGIAJosé Angel ColinaBelum ada peringkat
- 5a - Funciones de Variables AleatoriasDokumen13 halaman5a - Funciones de Variables AleatoriasCristian Fernandez WilgenhoffBelum ada peringkat
- 1 ProbabilidadesDokumen28 halaman1 ProbabilidadesCristian Fernandez Wilgenhoff100% (1)
- 1-Estadistica DescriptivaDokumen20 halaman1-Estadistica DescriptivaCristian Fernandez WilgenhoffBelum ada peringkat
- Ace Ton ADokumen4 halamanAce Ton AcotlodBelum ada peringkat
- HDS BencenoDokumen6 halamanHDS BencenoCarlos Arturo Rodriguez RamirezBelum ada peringkat
- Apunte de Momentos de InerciasDokumen16 halamanApunte de Momentos de InerciasCristian Fernandez Wilgenhoff100% (1)
- Pandeo Elastico de BarrasDokumen40 halamanPandeo Elastico de BarrasCristian Fernandez WilgenhoffBelum ada peringkat
- Informe IIDokumen9 halamanInforme IIDiego André Ąbregú Velásquez0% (1)
- Clase 21 - Inst y Sensores NRC 4675Dokumen22 halamanClase 21 - Inst y Sensores NRC 4675Santiago ErickBelum ada peringkat
- Ejercicios Tema 2 - Trenes de EngranajesDokumen9 halamanEjercicios Tema 2 - Trenes de EngranajesAinhoa FrancesBelum ada peringkat
- Diseño de Miembros Circulares Sometidos A TorsionDokumen6 halamanDiseño de Miembros Circulares Sometidos A TorsionMicael RDBelum ada peringkat
- Movimiento Curvilineo en Coordenadas RectangularesDokumen7 halamanMovimiento Curvilineo en Coordenadas RectangularesWilliamLordBelum ada peringkat
- Fisica Aprendizaje N°2 Actividad (1) ..Dokumen14 halamanFisica Aprendizaje N°2 Actividad (1) ..Andres Felipe Vitola PaezBelum ada peringkat
- LaboratorioRCN JCCTDokumen8 halamanLaboratorioRCN JCCTCAROLINA CABALLERO TORREZBelum ada peringkat
- Problema de Diseño Con Engranes RectosDokumen13 halamanProblema de Diseño Con Engranes RectosRoberto Mauricio MoncadaBelum ada peringkat
- Ondas Sonoras 201Dokumen36 halamanOndas Sonoras 201RICH ALVBelum ada peringkat
- Guia ClaseTaller - Ondas Sonoras FIS 229 - 2717Dokumen3 halamanGuia ClaseTaller - Ondas Sonoras FIS 229 - 2717Israel PérezBelum ada peringkat
- Hidraulica BasicaDokumen49 halamanHidraulica BasicaDIEGO HERNANDEZ PARRASBelum ada peringkat
- Sesión 2Dokumen44 halamanSesión 2TENORIO AUQUI ANTHONY GERSONBelum ada peringkat
- Guía de FisicaM.R.U.VDokumen23 halamanGuía de FisicaM.R.U.VTIRSO VILLEGASBelum ada peringkat
- BVCBDokumen41 halamanBVCBEduardo Fernandez DazaBelum ada peringkat
- Aind3102 s2 Lectura4Dokumen3 halamanAind3102 s2 Lectura4Cristian MedranoBelum ada peringkat
- Laboratorio ProyectilesDokumen7 halamanLaboratorio ProyectilesGEORGE IVANOK MUNOZ CASTILLOBelum ada peringkat
- Convección de MasaDokumen5 halamanConvección de MasaELIZABETH RAQUEL MENA DIONICIOBelum ada peringkat
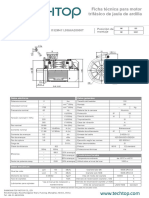
- Motor 15 HP 1800 RPM 220-440v Ie3 b5 TechtopDokumen1 halamanMotor 15 HP 1800 RPM 220-440v Ie3 b5 Techtopwillian aragonBelum ada peringkat
- Practica 2 Deformaciones en Secciones VariablesDokumen7 halamanPractica 2 Deformaciones en Secciones VariablesjosephBelum ada peringkat
- Tarea Grupal I U I Exposicion - Docx MEC FLUIDOS IDokumen4 halamanTarea Grupal I U I Exposicion - Docx MEC FLUIDOS IAlvaro Montero GonzalesBelum ada peringkat
- Taller 2. Energía Potencial y Ley Conservación Energía T36YT38Dokumen8 halamanTaller 2. Energía Potencial y Ley Conservación Energía T36YT38Andres VidalBelum ada peringkat
- Solucion Taller de Torsion PDFDokumen5 halamanSolucion Taller de Torsion PDFHelena Valencia EcheverryBelum ada peringkat
- Aplicación de la ecuación de Bernoulli en un VenturímetroDokumen14 halamanAplicación de la ecuación de Bernoulli en un VenturímetroJaime CandelejoBelum ada peringkat
- Maquinas TérmicasDokumen5 halamanMaquinas TérmicasMaria joseBelum ada peringkat
- PresiónDokumen6 halamanPresiónCM LizabethBelum ada peringkat
- Prueba de Ciencias Naturales 7Dokumen3 halamanPrueba de Ciencias Naturales 7Anonymous 2C7g5n3ugrBelum ada peringkat
- Interpretación de planos hidráulicos de maquinariaDokumen112 halamanInterpretación de planos hidráulicos de maquinariaDaniel Fesma CeballosBelum ada peringkat