Anda mungkin juga menyukai
- Perencanaan Dimensi Perkerasan JalanDokumen4 halamanPerencanaan Dimensi Perkerasan Jalansteny worangBelum ada peringkat
- Metode Kekakuan LangsungDokumen22 halamanMetode Kekakuan LangsungDede Rukmana100% (1)
- Analisa Struktur Metode MatriksDokumen105 halamanAnalisa Struktur Metode Matrikskartonohd0% (1)
- 04 Metode Kekakuan Langsung 2Dokumen70 halaman04 Metode Kekakuan Langsung 2Hamda Yunasdi100% (1)
- Balok MenerusDokumen6 halamanBalok MenerusIkhmal100% (1)
- Kekakuan Dan FleksibilitasDokumen20 halamanKekakuan Dan FleksibilitasZul Fadhli100% (1)
- 2 Kekakuan Dan Fleksibilitas PDFDokumen8 halaman2 Kekakuan Dan Fleksibilitas PDFAnna Emiliawati100% (1)
- Analisa Balok Beton Bertulang LengkapDokumen12 halamanAnalisa Balok Beton Bertulang LengkapAmbrosius asly ToronBelum ada peringkat
- P04-Bangunan Bagi Bangunan SadapDokumen26 halamanP04-Bangunan Bagi Bangunan SadapariBelum ada peringkat
- Perhitungan Sloof 15-30-1Dokumen4 halamanPerhitungan Sloof 15-30-1ilmiBelum ada peringkat
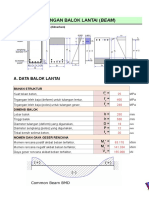
- BeamDokumen20 halamanBeammeyBelum ada peringkat
- Contoh Soal Analisa Matriks (Portal) Kekakuan BiasaDokumen12 halamanContoh Soal Analisa Matriks (Portal) Kekakuan Biasacatatankuliah100% (1)
- Skema Sungai Serang Dan Sistem DrainaseDokumen1 halamanSkema Sungai Serang Dan Sistem DrainaseZani AhmadBelum ada peringkat
- Makalah Penerapan Metode Cramer Untuk Perhitungan Lendutan PelatDokumen16 halamanMakalah Penerapan Metode Cramer Untuk Perhitungan Lendutan Pelatdyandra verrenBelum ada peringkat
- Laporan Akhir JembatanDokumen15 halamanLaporan Akhir JembatanMohammad Iqbal Yanuar100% (1)
- Perencanaan Balok Kolom Pada Elemen Struktur Rafter Tanpa Pengaku BadanDokumen20 halamanPerencanaan Balok Kolom Pada Elemen Struktur Rafter Tanpa Pengaku BadanAnangLuthfiBelum ada peringkat
- Contoh Soal Balok Gerber Mekanika TeknikDokumen3 halamanContoh Soal Balok Gerber Mekanika TeknikMuliyadi TajuddinBelum ada peringkat
- Perhitungan Tulangan Geser Balok AnakDokumen2 halamanPerhitungan Tulangan Geser Balok AnakMulyo Dadi100% (1)
- Kajian Potensi Likuifaksi Pasca Gempa - Hendri WarmanDokumen20 halamanKajian Potensi Likuifaksi Pasca Gempa - Hendri WarmanNanu Karunia WigunaBelum ada peringkat
- SNI PerbaikanTanah Draft GowDokumen91 halamanSNI PerbaikanTanah Draft GowMuhammad Yogi AkbarBelum ada peringkat
- Teori Soal Dan Penyelesaian Struktur Beton Bertulang IDokumen366 halamanTeori Soal Dan Penyelesaian Struktur Beton Bertulang IRyan SatriaBelum ada peringkat
- Perhitungan Nilai CB CB Value Calculation Untuk Balok Dan Kolom LenturDokumen17 halamanPerhitungan Nilai CB CB Value Calculation Untuk Balok Dan Kolom Lenturchristopherapss100% (1)
- Perencanaan SandaranDokumen3 halamanPerencanaan SandaranErwin d'AdventuraBelum ada peringkat
- Tugas Pci GirderDokumen23 halamanTugas Pci GirderigagalihBelum ada peringkat
- Teori Tekanan Tanah Lateral 1Dokumen36 halamanTeori Tekanan Tanah Lateral 1Rajinda BintangBelum ada peringkat
- Sambungan Baja Dan KUDA-KUDADokumen28 halamanSambungan Baja Dan KUDA-KUDAZainur WezBelum ada peringkat
- Perhitungan Balok 20 x30 CMDokumen4 halamanPerhitungan Balok 20 x30 CMDunia putriBelum ada peringkat
- Perancangan Dinding Geser Untuk LiftDokumen13 halamanPerancangan Dinding Geser Untuk LiftIwan Sutriono100% (1)
- RAB Rumah MewahDokumen1 halamanRAB Rumah MewahRemboko Ainun NazarBelum ada peringkat
- Perencanaan Pembangunaan BendunganDokumen23 halamanPerencanaan Pembangunaan BendunganramsiBelum ada peringkat
- GEOFOAMDokumen22 halamanGEOFOAMIrma Rizki100% (2)
- Metode Momen AreaDokumen28 halamanMetode Momen AreaSyaifuddin Van CiputraBelum ada peringkat
- Konsol Pendek Atau CorbelDokumen11 halamanKonsol Pendek Atau CorbelIki HendroBelum ada peringkat
- Penyelesaian Soal Struktur Baja IIDokumen5 halamanPenyelesaian Soal Struktur Baja IIyane_ftunp100% (1)
- Analisis Pondasi Mesin (Kedalaman 1.8 M)Dokumen69 halamanAnalisis Pondasi Mesin (Kedalaman 1.8 M)Abdul Aziz100% (3)
- Perencanaan SambunganDokumen6 halamanPerencanaan SambunganAntonBelum ada peringkat
- Analisis Stabilitas PDFDokumen95 halamanAnalisis Stabilitas PDFMauluddin SebandarBelum ada peringkat
- Pondasi Struktur Utama p9 - BORDokumen8 halamanPondasi Struktur Utama p9 - BOREngDbtBelum ada peringkat
- Appendices PDFDokumen42 halamanAppendices PDFMuhammadFhadilBelum ada peringkat
- Balok KeranDokumen4 halamanBalok KeranTeuku SayutiBelum ada peringkat
- Turap Pada Lempung-NewDokumen3 halamanTurap Pada Lempung-NewSri WahyuniBelum ada peringkat
- Teori Tekanan Tanah Lateral 1Dokumen36 halamanTeori Tekanan Tanah Lateral 1AndiBelum ada peringkat
- Pra Ujian Mac 2020 Tingkatan 4 PDFDokumen4 halamanPra Ujian Mac 2020 Tingkatan 4 PDFRoszana Selamat0% (1)
- Forum 8-Mahendra Prima Putra-41120120042Dokumen2 halamanForum 8-Mahendra Prima Putra-41120120042Mahendra Prima PutraBelum ada peringkat
- Home Work Bab #1Dokumen8 halamanHome Work Bab #1raihan1979Belum ada peringkat
- Kampoi Matematik 2023 Form 4Dokumen117 halamanKampoi Matematik 2023 Form 4Iffah Nor SyahirahBelum ada peringkat
- TAJUK4 KamiranDokumen28 halamanTAJUK4 KamiranJessica LoongBelum ada peringkat
- Tutorial 5 Latihan 5Dokumen3 halamanTutorial 5 Latihan 5Hamizah SaariBelum ada peringkat
- 1 Bab #1 - Fungsi & Persamaam Kuadratik (PDPR)Dokumen17 halaman1 Bab #1 - Fungsi & Persamaam Kuadratik (PDPR)amanda aleesyaBelum ada peringkat
- Intgral TertentuDokumen10 halamanIntgral TertentumakrocbBelum ada peringkat
- Jawapan Tugasan 2Dokumen55 halamanJawapan Tugasan 2Nur Nur NurBelum ada peringkat
- ANALISA STRUKTUR 1 (Ringkasan Materi)Dokumen7 halamanANALISA STRUKTUR 1 (Ringkasan Materi)gervansi ancengBelum ada peringkat
- Ujian 1 Math F4Dokumen5 halamanUjian 1 Math F4fazila fauziBelum ada peringkat
- Interpolasi (Lanjutan)Dokumen15 halamanInterpolasi (Lanjutan)dimaskalbu3Belum ada peringkat
- Tugas Komputer GrafikDokumen3 halamanTugas Komputer GrafikferdianaditvBelum ada peringkat
- Grafik Fungsi TrigonometriDokumen14 halamanGrafik Fungsi TrigonometriPutu WirantoBelum ada peringkat
- Mekanisme Reaksi BerkatalisDokumen16 halamanMekanisme Reaksi BerkatalisPKA19005Dini AnggrainiBelum ada peringkat
- LKPD Gafik Fungsi CosinusDokumen7 halamanLKPD Gafik Fungsi CosinusAgustina AnitaBelum ada peringkat
- B3 - Kuasa 2, 3 Punca Kuasa 2, 3Dokumen15 halamanB3 - Kuasa 2, 3 Punca Kuasa 2, 3sygkuhuda79Belum ada peringkat
- Nota PengamiranDokumen20 halamanNota PengamiranAsmahani RashidBelum ada peringkat