Research Cell: An International Journal of Engineering Sciences ISSN: 2229-6913 Issue Sept 2011, Vol.
423
Design and comparison of butterworth and chebyshev type-1 low pass filter using Matlab
Tushar Malica1, Singdha Shekhar2, Zakir Ali3
Institute of Engineering & Technology, Bundelkhand University , Jhansi ,India tmalica27@gmail.com, snigdha2090@gmail.com, zakirali008@gmail.com
Abstract: In the communication system, signals are analogous to carriers of
information, be it useful or unwanted. Hence it becomes essential to extract or enhance the useful information and remove any redundancy from a mix of conflicting information. This is the simplest aim of signal processing. The objective of this paper is to know characteristics of each filter for a particular frequency specificationButterworth low-pass and Chebyshev type-1 low-pass filter and to know how these filters compare. The main concentration being on the magnitude response. An ideal low pass filter has a gain of one in the pass band, zero outside that region. In this paper we compare a Butterworth low pass filter and a Chebyshev type-I low pass filter designed using MATLAB codes which gives the magnitude and phase responses of each of the filters.
I.
Introduction
Signal processing is an operation designed for extracting, enhancing, storing and transmitting useful information. The distinction between useful and unwanted information is situation and need dependant. Hence signal processing is application dependent. An important element in digital signal processing is the filter. In circuit theory, a filter is an electrical circuit that manipulates the amplitude and/or phase characteristics of a signal with respect to frequency. In signal
2011 Journal Anu Books
424
Tushar Malica, Singdha Shekhar, Zakir Ali
processing, the function of a filter is to remove unwanted parts of the signal, such as noise, or selective extraction of the signal such as the components in a certain frequency range. Hence filter has a gain which depends on signal frequency. Our study will concentrate on two types of filters only Butterworth low-pass filter Chebyshev type-1 low pass filter
Some of the important terms used here are :Transfer function The frequency-domain behaviour of a filter is described mathematically in terms of its transfer function or network function. This is the ratio of the Laplace transforms of its output to its input signals. The voltage transfer function H(s) of a filter can therefore be written as :H(s) = Vout(s) Vin(s) where Vin(s) and Vout(s) are the input and output signal voltages respectively and s is the complex frequency variable. The transfer function defines the filters response to any arbitrary input signal. The magnitude of the transfer function as a function of frequency, indicates the effect of the filter on the amplitudes of sinusoidal signals at various frequencies. Knowing the transfer function magnitude (or gain) at each frequency allows us to determine how well the filter can distinguish between signals at different frequencies. By replacing the variable s in ( i ) with j, where is the radian frequency (2f), we can find the filters effect on the magnitude and phase of the input signal. The magnitude is found by taking the absolute value of ( i ):|H(j)| = Vout(j) Vin(j) And the phase is :arg H(j) = arg Vout(j) Vin(j)
2011 Journal Anu Books
(i)
Research Cell: An International Journal of Engineering Sciences ISSN: 2229-6913 Issue Sept 2011, Vol. 4
425
Order of a filter The order of a filter is the highest power of the variable s in its transfer function. With every increase of order n, the attenuation at higher frequencies increases by n 20 dB. It is directly related to the number of components in the filter, and therefore to its cost, its physical size, and the complexity of the design task. Therefore, higher-order filters are more expensive, take up more space, and are more difficult to design. The primary advantage of a higher-order filter is that it will have a steeper roll-off slope than a similar lower order filter. In general, a transfer function for an nth-order network, (one with n capacitors and inductors), can be written as below:H(s) = H0 sn + bn-1sn-1 + bn-2sn-2 + ... +b1 + b0 sn + an-1sn-1 + an-2sn-2 + ... +a1 + a0 Poles and zeroes The factored form of a network function can be depicted graphically in a pole-zero diagrams. A pole anywhere to the right of the imaginary axis indicates instability. If the pole is located on the positive real axis, the network output will be an increasing exponential function. A positive pole not located on the real axis will give an exponentially increasing sinusoidal output Stable networks will have their poles located on or to the left of the imaginary axis. Poles on the imaginary axis indicate an undamped sinusoidal output (in other words, a sine-wave oscillator), while poles on the left real axis indicate damped exponential response, and complex poles in the negative half plane indicate damped sinusoidal response. Basic elements in digital filter designing To completely describe digital filters, three basic elements (or building blocks) are needed: an adder, a multiplier, and a delay element. The adder has two inputs and one output, and it simply adds the two inputs together. The multiplier is a gain element, and it multiplies the input signal by a constant. The delay element delays the incoming signal by one sample. Digital filters can be implemented using either a block diagram or a signal flow graph.
2011 Journal Anu Books
426
Tushar Malica, Singdha Shekhar, Zakir Ali
Figure 1.Depiction of the basic designing elements
With the basic building blocks, the two different filter structures depending on the form of the systems response to a unit pulse input can easily be implemented. These two structures are Infinite Impulse Response (IIR) and Finite Impulse Response (FIR). The former is commonly implemented using a feedback (recursive) structure, while the latter usually require no feedback (non-recursive). The system response and the difference equation for IIR filter is as follows:b0 + b1 z-1 + ...+ bM z-M 1 + a1 z
-1
+ ... + aN z-N
Y(n) = bm x(n-m) - am y(n-m) Summation being from zero M and N respectively. The system response and the difference equation for a FIR filter is as follows: b0 + b1 z-1 + ...+ bM z1-M = bkz-k Y(n)= bkx(n-k) Summation being from zero to m-1.
2011 Journal Anu Books
Research Cell: An International Journal of Engineering Sciences ISSN: 2229-6913 Issue Sept 2011, Vol. 4
427
Figure 2. Signal Flow Graph of IIR Filter
Figure 3. Signal flow graph of FIR filter
II. Filter Design MATLAB has several design algorithms that can be used to create and analyze both IIR and FIR digital filters. The IIR filters that can be created in MATLAB are Butterworth, Chebyshev type 1 and 2, and Elliptic. The FIR filter algorithms in Matlab are equiripple, least squares, and Kaiser window. Among the most widely used filters are the Butterworth low pass filter and Chebyshev low pass filter.
Figure 4. An ideal low pass filter
Butterworth low pass filter The first and probably best-known filter approximation is the Butterworth. The rolloff is smooth and monotonic, with a low-pass or high-pass roll-off
2011 Journal Anu Books
428
Tushar Malica, Singdha Shekhar, Zakir Ali
rate of 20 dB/decade(6 dB/octave) for every pole. The general equation for a Butterworth filters amplitude response when =1 is: < c >c where N is the order of the filter, and can be any positive whole number (1, 2, 3, ), and c is the cut-off frequency in rad/sec. The code used displays the magnitude and phase responses of a butterworth low- pass filter of order ranging from 1-10 and normalized value of 0.6 (i.e. 300/500). The results are shown in appendix- I. Chebyshev type-I low-pass filter Another approximation to the ideal filter is the Chebyshev or equal ripple response. The addition of pass band ripple as a parameter makes the specification process for a Chebyshev filter a bit more complicated than for a Butterworth filter, but also increases flexibility. The nominal gain of the filter is equal to the filters maximum pass band gain. An odd-order Chebyshev will have a dc gain (in the low-pass case) equal to the nominal gain, with dips in the amplitude response curve equal to the ripple value. An evenorder Chebyshev low-pass will have its dc gain equal to the nominal filter gain minus the ripple value; the nominal gain for an even-order Chebyshev occurs at the peaks of the pass band ripple.The general equation for a Chebyshev filters amplitude response when (epsilon) =1is:<c > c (ii)
2011 Journal Anu Books
Research Cell: An International Journal of Engineering Sciences ISSN: 2229-6913 Issue Sept 2011, Vol. 4
429
where N is the order of the filter, and can be any positive whole number (1, 2, 3, ), and &!c is the cut-off frequency in rad/sec. The code used displays the magnitude and phase responses of a Chebyshev type-I low- pass filter of order ranging from 1-10 and normalized value of 0.6 (i.e. 300/500). The pass band ripple is calculated by : R = -10 log10 |H(j)|2 As R = -10 log10 1 [1+ 2 ] and |H(j)|2 has its maximum values as 1/[1+ 2 ] for < c The results are shown in appendix- IV. Results and Discussion Hardware required for similar order filter is same irrespective of the type. The increase in order indicates increase in hardware too. This increases the complexity of the design and the production cost too. For instance, number of adders can be given by 2N, where N is the order of the filter. [refer appendix- III] The Chebyshev characteristic has a steeper rolloff near the cutoff frequency when compared to the Butterworth. Though the monotonicity in the pass band is compromised. [refer appendix-VI]. This means that the Chebyshev filter for the same order attenuates or rejects frequencies at the stop band in a better way than the Butterworth filter. Hence, a same order Chebyshev low-pass filter will work more effectively than a Butterworth low-pass filter in disposing unwanted frequencies but, if the Butterworth filters maybe the better choice when a ripple-less and maximally flat response is desired. While, the Butterworth filter is maximally flat at =0, the Chebyshev filter may have ripple in the pass band of amplitude response. This can be further proved by putting =0 in (ii). The gain comes out to be 1 which is the maximum Butterworth magnitude value. It exhibits a nearly flat pass band with no ripple and smooth rolloff. [refer appendix- I]. On the other hand, The amount of pass band ripple is one of the parameters used in specifying a Chebyshev filter. [refer appendix-IV]
2011 Journal Anu Books
430
Tushar Malica, Singdha Shekhar, Zakir Ali
Also the Chebyshev filter has a bigger decrease in magnitude with the increase in frequency than Butterworth. So, the derivative of Chebyshevs gain will be more negative than Butterworth filter. The phase response is linear at first but some ripple or non-linearity is observed as the order of the Butterworth filter increases.[refer appendix-I]. Phase response maybe linear piece-wise in Chebyshev filter.[refer appendixIV]
2011 Journal Anu Books
Research Cell: An International Journal of Engineering Sciences ISSN: 2229-6913 Issue Sept 2011, Vol. 4
431
APPENDIX-I The output of Butterworth low-pass filter with uniformly increasing order of the filter is shown below. The blue line represents the magnitude response and the green line traces the phase response.
2011 Journal Anu Books
432
Tushar Malica, Singdha Shekhar, Zakir Ali
2011 Journal Anu Books
Research Cell: An International Journal of Engineering Sciences ISSN: 2229-6913 Issue Sept 2011, Vol. 4
433
APPENDIX-II
Butterworth filters magnitude responses of different order compared.
2011 Journal Anu Books
434
Tushar Malica, Singdha Shekhar, Zakir Ali
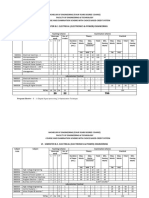
APPENDIX-III Butterworth filter structure: direct form II transposed, second order sections Chebyshev filter structure: direct form II transposed, second order sections
Number of sections 1 1 2 2 3 3 4 4 5 5 Linear phase no no no no no no no no no no Number of Number of multipliers adders 2 4 5 7 8 10 11 13 14 16 2 4 6 8 10 12 14 16 18 20
Order 1 2 3 4 5 6 7 8 9 10
Stable yes yes yes yes yes yes yes yes yes yes
Table 1. Butterworth low-pass filter. Filter information data acquired and compiled
Order 1 2 3 4 5 6 7 8 9 10
Number of sections 1 1 2 2 3 3 4 4 5 5
Stable yes yes yes yes yes yes yes yes yes yes
Linear phase no no no no no no no no no no
Number of multipliers 2 4 5 7 8 10 11 13 14 16
Number of adders 2 4 6 8 10 12 14 16 18 20
Table 2. Chebyshev type-I low-pass filter. Filter information data acquired and compiled
2011 Journal Anu Books
Research Cell: An International Journal of Engineering Sciences ISSN: 2229-6913 Issue Sept 2011, Vol. 4
435
APPENDIX-IV
2011 Journal Anu Books
436
Tushar Malica, Singdha Shekhar, Zakir Ali
2011 Journal Anu Books
Research Cell: An International Journal of Engineering Sciences ISSN: 2229-6913 Issue Sept 2011, Vol. 4
437
The output of Chebyshev type-I low-pass filter with uniformly increasing order of the filter is shown below. The blue line represents the magnitude response and the green line traces the phase response APPENDIX-V Chebyshev filters magnitude responses of different order compared. APPENDIX-VI Comparison of magnitude responses of Butterworth and Chebyshev type-I low pass filters. The red trace indicates the Butterworth responses while the blue lines traces the Chebyshev magnitude responses.
2011 Journal Anu Books
438
Tushar Malica, Singdha Shekhar, Zakir Ali
References [1] [2] [3] Vinay K. Ingle, John G. Proakis, Digital Signal Processing Using MATLAB V.4 Digital Filter Design Using Matlab, by Timothy J. Schlichter, EE 4000 Introduction to Digital Filtering, February 1999 10 MHz Butterworth Filter Using the Operational Amplifier THS4001 Dirk Gehrke and Andreas Hahn, Application Report SLOA032 - October 1999, Texas Instruments Signals and systems with Matlab computing and simulink modellong by Steven T. Karris www.mathworks.com
[4] [5]
2011 Journal Anu Books
Anda mungkin juga menyukai
- High Speed and Low Power FPGA Implementation of FIR Filter For DSP ApplicationsDokumen10 halamanHigh Speed and Low Power FPGA Implementation of FIR Filter For DSP ApplicationslathavenkyBelum ada peringkat
- EE3001 - Advanced Measurements: Digital FiltersDokumen38 halamanEE3001 - Advanced Measurements: Digital FilterssiamaeBelum ada peringkat
- Notch Filter DigitalDokumen43 halamanNotch Filter Digitalanand248Belum ada peringkat
- Audio Sieving Using Signal FiltersDokumen19 halamanAudio Sieving Using Signal FiltersPiyush YadavBelum ada peringkat
- 18ee63 DSP Module-3Dokumen19 halaman18ee63 DSP Module-3Appasabgouda BiradarBelum ada peringkat
- Filter ApproximationDokumen3 halamanFilter ApproximationpalmerxBelum ada peringkat
- Filter Design Guide: Source:, Oct. 14, 2004 Edited by William Rose, 2011Dokumen17 halamanFilter Design Guide: Source:, Oct. 14, 2004 Edited by William Rose, 2011Anonymous pS4LT2GJUSBelum ada peringkat
- Design and Analysis of A 2.4 GHZ, Fifth - Order Chebyshev Microstrip LPFDokumen6 halamanDesign and Analysis of A 2.4 GHZ, Fifth - Order Chebyshev Microstrip LPFJournal of TelecommunicationsBelum ada peringkat
- IIR Filter Design and Analysis Using Notch and Comb FilterDokumen4 halamanIIR Filter Design and Analysis Using Notch and Comb FilterijsretBelum ada peringkat
- An Efficient Decimation Sinc-Filter Design For Software Radio ApplicationsDokumen3 halamanAn Efficient Decimation Sinc-Filter Design For Software Radio ApplicationsSumeet KalraBelum ada peringkat
- American International University-Bangladesh (Aiub) : Faculty of Engineering Department of EEEDokumen10 halamanAmerican International University-Bangladesh (Aiub) : Faculty of Engineering Department of EEESajedul Islam RiyanBelum ada peringkat
- Lab 5Dokumen5 halamanLab 5Katiuvelis Diaz RodriguezBelum ada peringkat
- Elec9123 DSP DesignDokumen7 halamanElec9123 DSP DesignSydney FinestBelum ada peringkat
- VLSI Design of Half-Band IIR Interpolation and Decimation FilterDokumen7 halamanVLSI Design of Half-Band IIR Interpolation and Decimation FiltertansnvarmaBelum ada peringkat
- Class Notes - Digital Filters For Numerical RelayDokumen4 halamanClass Notes - Digital Filters For Numerical RelaybiswajitsahooBelum ada peringkat
- Some Case Studies on Signal, Audio and Image Processing Using MatlabDari EverandSome Case Studies on Signal, Audio and Image Processing Using MatlabBelum ada peringkat
- Sescar de Guzman Experiment PartialDokumen9 halamanSescar de Guzman Experiment PartialKyle ChesterBelum ada peringkat
- Average FilteringDokumen22 halamanAverage Filtering7204263474Belum ada peringkat
- Lab.6&7. IIR FiltersDokumen8 halamanLab.6&7. IIR FiltershimBelum ada peringkat
- Signal Processing in MatlabDokumen39 halamanSignal Processing in MatlabnrameshmeBelum ada peringkat
- Digital Filter - WikipediaDokumen27 halamanDigital Filter - WikipediaanntreesajoeBelum ada peringkat
- Untitled DocumentDokumen11 halamanUntitled DocumentAbhiBelum ada peringkat
- Ca4 - Designing and Implementing FiltersDokumen9 halamanCa4 - Designing and Implementing Filtersapi-223721455Belum ada peringkat
- Lab 5-Digital FilterDokumen10 halamanLab 5-Digital FilterEssa Al-KishtainiBelum ada peringkat
- Dspa Word FileDokumen82 halamanDspa Word FilenithinpogbaBelum ada peringkat
- Chapter 4Dokumen39 halamanChapter 4Shoaib MughalBelum ada peringkat
- Design and Performance Analysis of Band Pass Iir Filter For Sonar ApplicationDokumen5 halamanDesign and Performance Analysis of Band Pass Iir Filter For Sonar ApplicationijeteeditorBelum ada peringkat
- 20116052-DSP Term ProjectDokumen14 halaman20116052-DSP Term ProjectH052 Rajesh Komaravalli ECEBelum ada peringkat
- Question Bank ITDokumen20 halamanQuestion Bank ITSreejith GopiBelum ada peringkat
- TechnicalReview1977 1Dokumen34 halamanTechnicalReview1977 1mastelecentroBelum ada peringkat
- EL220 Signals and Systems: Experiment # 12Dokumen6 halamanEL220 Signals and Systems: Experiment # 12Choudhary Abdul AqeelBelum ada peringkat
- Ijecet: International Journal of Electronics and Communication Engineering & Technology (Ijecet)Dokumen9 halamanIjecet: International Journal of Electronics and Communication Engineering & Technology (Ijecet)IAEME PublicationBelum ada peringkat
- Improved Adaptive Control Algorithm For Ac-Tive-Passive Vibration Isolation of Diesel Ge - NeratorDokumen9 halamanImproved Adaptive Control Algorithm For Ac-Tive-Passive Vibration Isolation of Diesel Ge - Neratorm2kam21Belum ada peringkat
- Lab - L3411Dokumen10 halamanLab - L3411Muhammad AhmedBelum ada peringkat
- A Basic Introduction To Filters, Active, Passive, and Switched CapacitorDokumen22 halamanA Basic Introduction To Filters, Active, Passive, and Switched CapacitorheadupBelum ada peringkat
- Lesson17 2Dokumen34 halamanLesson17 2api-277477207Belum ada peringkat
- Filter DesignDokumen9 halamanFilter DesignTaylor MaddixBelum ada peringkat
- Research On Analog Bandwidth Enhancement Technology For Digital Storage OscilloscopeDokumen4 halamanResearch On Analog Bandwidth Enhancement Technology For Digital Storage OscilloscopeMarioBelum ada peringkat
- Finite Impulse ResponseDokumen6 halamanFinite Impulse ResponseYoga Putra PratamaBelum ada peringkat
- ECEN325 Lab ManualDokumen66 halamanECEN325 Lab ManualIrwan RamliBelum ada peringkat
- Performance Analysis of Different Inverse Filter Design TechniquesDokumen7 halamanPerformance Analysis of Different Inverse Filter Design TechniquesEditor IJSETBelum ada peringkat
- Active and Passive Filter CircuitsDokumen10 halamanActive and Passive Filter CircuitsDavid.R.Gilson88% (8)
- Lecture9-IIR FilterDokumen54 halamanLecture9-IIR FilterAiran Tan100% (1)
- Project On Wireless CommunicationDokumen16 halamanProject On Wireless CommunicationAkshat SharmaBelum ada peringkat
- 325 Lab 2 ReportDokumen8 halaman325 Lab 2 Reportapi-241454978Belum ada peringkat
- Manuscript Filter BAJ PDFDokumen13 halamanManuscript Filter BAJ PDFRajib RajuBelum ada peringkat
- Filters Active Passive N Switched CapacitorDokumen24 halamanFilters Active Passive N Switched Capacitorgotti45Belum ada peringkat
- 2 - Higher-Order, Cascaded, Active Filters: ECE 6414: Continuous Time Filters (P. Allen) - Chapter 2 Page 2-1Dokumen36 halaman2 - Higher-Order, Cascaded, Active Filters: ECE 6414: Continuous Time Filters (P. Allen) - Chapter 2 Page 2-1Beigh Umair ZahoorBelum ada peringkat
- What Is FilteringDokumen17 halamanWhat Is FilteringShoaib RathoreBelum ada peringkat
- (R) SSRN Id3660048Dokumen16 halaman(R) SSRN Id3660048Dr. D. V. KamathBelum ada peringkat
- Echo Cancellation in Audio Signal Using LMS Algorithm: Sanjay K. Nagendra Vinay Kumar.S.BDokumen5 halamanEcho Cancellation in Audio Signal Using LMS Algorithm: Sanjay K. Nagendra Vinay Kumar.S.BPrabira Kumar SethyBelum ada peringkat
- Digital Filter DesigningDokumen6 halamanDigital Filter DesigningToalha TosrifBelum ada peringkat
- Discrete Wavelet Transform Using Circular ConvolutionDokumen6 halamanDiscrete Wavelet Transform Using Circular ConvolutionijsretBelum ada peringkat
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsDari EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsBelum ada peringkat
- Adaptive Filter: Enhancing Computer Vision Through Adaptive FilteringDari EverandAdaptive Filter: Enhancing Computer Vision Through Adaptive FilteringBelum ada peringkat
- Filter Bank: Insights into Computer Vision's Filter Bank TechniquesDari EverandFilter Bank: Insights into Computer Vision's Filter Bank TechniquesBelum ada peringkat
- Digital Signal Processing: Instant AccessDari EverandDigital Signal Processing: Instant AccessPenilaian: 3.5 dari 5 bintang3.5/5 (2)
- Deadwood Detection and Elimination in Text Summarization For Punjabi LanguageDokumen9 halamanDeadwood Detection and Elimination in Text Summarization For Punjabi LanguageResearch Cell: An International Journal of Engineering SciencesBelum ada peringkat
- An International Journal of Engineering Sciences (Ijoes)Dokumen1 halamanAn International Journal of Engineering Sciences (Ijoes)Research Cell: An International Journal of Engineering SciencesBelum ada peringkat
- Comparative Analysis of Different Protocols To Manage Large Scale NetworksDokumen7 halamanComparative Analysis of Different Protocols To Manage Large Scale NetworksResearch Cell: An International Journal of Engineering SciencesBelum ada peringkat
- Internet Is An Effective Tool For E-Shopping: Dr. Ch. Seetha RamDokumen10 halamanInternet Is An Effective Tool For E-Shopping: Dr. Ch. Seetha RamResearch Cell: An International Journal of Engineering SciencesBelum ada peringkat
- A Proposed Method For Image Steganography Using Edge DetectionDokumen4 halamanA Proposed Method For Image Steganography Using Edge DetectionResearch Cell: An International Journal of Engineering SciencesBelum ada peringkat
- Call For Papers - IJOES Volume 9 December 2013Dokumen1 halamanCall For Papers - IJOES Volume 9 December 2013Research Cell: An International Journal of Engineering SciencesBelum ada peringkat
- Enrolment Data of Disabled Students of Ignou: A Case Study Using Id3Dokumen9 halamanEnrolment Data of Disabled Students of Ignou: A Case Study Using Id3Research Cell: An International Journal of Engineering SciencesBelum ada peringkat
- A Questionnaire On Survey of Enterprise Resource Planning (ERP) in Engineering InstitutesDokumen10 halamanA Questionnaire On Survey of Enterprise Resource Planning (ERP) in Engineering InstitutesResearch Cell: An International Journal of Engineering SciencesBelum ada peringkat
- Researck WorkDokumen2 halamanResearck WorkResearch Cell: An International Journal of Engineering SciencesBelum ada peringkat
- An Analysis of Difficulties in Punjabi Language Automation Due To Non-Standardization of FontsDokumen8 halamanAn Analysis of Difficulties in Punjabi Language Automation Due To Non-Standardization of FontsResearch Cell: An International Journal of Engineering SciencesBelum ada peringkat
- Throughput Analysis of Ethernet and Fiber Distributed Data Interface Using OPNET IT Guru Academic Edition 9.1Dokumen7 halamanThroughput Analysis of Ethernet and Fiber Distributed Data Interface Using OPNET IT Guru Academic Edition 9.1Research Cell: An International Journal of Engineering SciencesBelum ada peringkat
- An Efficient Approach To Solve Sudoku Problem by Harmony Search AlgorithmDokumen12 halamanAn Efficient Approach To Solve Sudoku Problem by Harmony Search AlgorithmResearch Cell: An International Journal of Engineering SciencesBelum ada peringkat
- Analog and Digital Signal Processing by Ashok Ambardar PDFDokumen822 halamanAnalog and Digital Signal Processing by Ashok Ambardar PDFSvh van Heerden100% (5)
- Lab 5. FIR & IIR Filters in Matlab: Filter DesignDokumen12 halamanLab 5. FIR & IIR Filters in Matlab: Filter DesignDrakshayaniMurgodBelum ada peringkat
- EEE6209 Part A Topic 01Dokumen39 halamanEEE6209 Part A Topic 01dialauchennaBelum ada peringkat
- The Convolution SumDokumen8 halamanThe Convolution SumkrajasekarantutiBelum ada peringkat
- Introduction To Discrete Time Signals and Systems - SBMA1402Dokumen157 halamanIntroduction To Discrete Time Signals and Systems - SBMA1402Kavya MamillaBelum ada peringkat
- Esrt Lab Manual Update 2022Dokumen119 halamanEsrt Lab Manual Update 2022sahumukeshkumar916Belum ada peringkat
- Free Pine Script IndicatorsDokumen15 halamanFree Pine Script IndicatorsGreater GloryBelum ada peringkat
- M.Tech MechatronicsDokumen29 halamanM.Tech MechatronicsTanush BansalBelum ada peringkat
- 2-Iteration Bound PDFDokumen3 halaman2-Iteration Bound PDFmasoudBelum ada peringkat
- LUT Optimization Using Combined APC-OMS Technique For Memory-Based ComputationDokumen9 halamanLUT Optimization Using Combined APC-OMS Technique For Memory-Based ComputationRaj PrabhasBelum ada peringkat
- DSP QBBBDokumen9 halamanDSP QBBBupender raoBelum ada peringkat
- Syllabus Ece 5 8 Reg2001Dokumen25 halamanSyllabus Ece 5 8 Reg2001api-3748534100% (3)
- Digital Signal Processing 2001: U Z U A AzDokumen16 halamanDigital Signal Processing 2001: U Z U A AzMustafamna Al SalamBelum ada peringkat
- Multirate Filtering For DSPDokumen414 halamanMultirate Filtering For DSPNarasimhan Kumaravelu67% (3)
- Iare DSPDokumen407 halamanIare DSPdineshBelum ada peringkat
- Sprabj 1Dokumen20 halamanSprabj 1Anonymous OFQuRiZOUzBelum ada peringkat
- Digital Filter DesignDokumen209 halamanDigital Filter DesigntowfiqeeeBelum ada peringkat
- Digital Signal Processing Question BankDokumen15 halamanDigital Signal Processing Question BankKishore KrishnaBelum ada peringkat
- Digital Signal Processing Laboratory: Sri Ramakrishna Engineering CollegeDokumen48 halamanDigital Signal Processing Laboratory: Sri Ramakrishna Engineering CollegeABISHEK R EIEBelum ada peringkat
- Electrical Syllabus of V and VI Sem Board of Electrical EngineeringDokumen27 halamanElectrical Syllabus of V and VI Sem Board of Electrical EngineeringMr GanpatBelum ada peringkat
- IIR FilterDokumen61 halamanIIR FilterMuhammad Muinul Islam100% (1)
- DSP 1Dokumen28 halamanDSP 1Jayan GoelBelum ada peringkat
- Kalman Filter For Dynamic Weighing SystemDokumen6 halamanKalman Filter For Dynamic Weighing SystemAditya SaputraBelum ada peringkat
- Lab 5Dokumen3 halamanLab 5Sameera මලිත් WithanachchiBelum ada peringkat
- E. Ambikairajah Australia: Part A: Signal ProcessingDokumen152 halamanE. Ambikairajah Australia: Part A: Signal ProcessingTahir KhAnBelum ada peringkat
- Equalization and Diversity: School of Information Science and Engineering, SDUDokumen93 halamanEqualization and Diversity: School of Information Science and Engineering, SDUSsgn SrinivasaraoBelum ada peringkat
- Structures For Discrete-Time SystemsDokumen30 halamanStructures For Discrete-Time SystemsfarsunBelum ada peringkat
- IoT Baby MonitorDokumen45 halamanIoT Baby MonitorDebopam KumarBelum ada peringkat
- An Application To Control Media Player With Voice Commands: Journal of Polytechnic January 2020Dokumen8 halamanAn Application To Control Media Player With Voice Commands: Journal of Polytechnic January 2020utkarsh mishraBelum ada peringkat
- Lec2 PDFDokumen74 halamanLec2 PDFTrần Nhật DươngBelum ada peringkat