Anda mungkin juga menyukai
- Analysis of Indeterminate Structures by Force MethodDokumen17 halamanAnalysis of Indeterminate Structures by Force Methodatish k100% (2)
- Footing 2 Storey Design 1Dokumen4 halamanFooting 2 Storey Design 1Arvin Torres GuintoBelum ada peringkat
- 1 Way SlabDokumen12 halaman1 Way SlabSemahegn GebiruBelum ada peringkat
- Design of Multi Storey Building Resting On Single ColumnDokumen4 halamanDesign of Multi Storey Building Resting On Single Columnesatjournals100% (1)
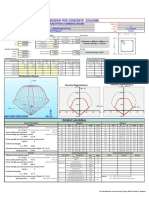
- Dimension Is 300mm X 300mm of Columns With 4pcs - Ø16mmDokumen1 halamanDimension Is 300mm X 300mm of Columns With 4pcs - Ø16mmMark Christian EsguerraBelum ada peringkat
- Structural Analysis and Design of Multi-Storeyed Building: Project MembersDokumen29 halamanStructural Analysis and Design of Multi-Storeyed Building: Project MembersKem Rai100% (1)
- Chapter - 5 Matrix Displacement Method PDFDokumen31 halamanChapter - 5 Matrix Displacement Method PDFRonald Cario SeguinBelum ada peringkat
- Application of Principle of Virtual Work To Find Displacement in Statically Indeterminate StructuresDokumen4 halamanApplication of Principle of Virtual Work To Find Displacement in Statically Indeterminate StructuresJorge SouzaBelum ada peringkat
- Wind Load Analysis by UBC For Tall Buildings - Tall BuildingsDokumen3 halamanWind Load Analysis by UBC For Tall Buildings - Tall BuildingsAfzal Waseem100% (1)
- Dimension Is 350mm X 350mm of Columns With 8pcs - Ø16mm: Proposed Two Storey Commercial BuildingDokumen1 halamanDimension Is 350mm X 350mm of Columns With 8pcs - Ø16mm: Proposed Two Storey Commercial BuildingMark Christian EsguerraBelum ada peringkat
- Finite Element Analysis by S.S. Bhavikatti, New Age Int. (2005)Dokumen11 halamanFinite Element Analysis by S.S. Bhavikatti, New Age Int. (2005)Ravi Pratap SinghBelum ada peringkat
- Macaulays Method For A Timoshenko Beam PDFDokumen9 halamanMacaulays Method For A Timoshenko Beam PDFPablo RicoBelum ada peringkat
- University of Engineering & Technology: PresentationDokumen120 halamanUniversity of Engineering & Technology: PresentationMahaSohailBelum ada peringkat
- Bridge DesignDokumen15 halamanBridge DesignAndrea DeleonBelum ada peringkat
- Calculation Sheet Gulf Consult: Makport-AWC Block-C1Dokumen4 halamanCalculation Sheet Gulf Consult: Makport-AWC Block-C1imranmehfoozBelum ada peringkat
- Study Material - 2011 PE Civil SQS ErrataDokumen1 halamanStudy Material - 2011 PE Civil SQS ErrataAlbert PizarroBelum ada peringkat
- CHAPTER 5 Structural AnalysisDokumen76 halamanCHAPTER 5 Structural AnalysisDavid MurphyBelum ada peringkat
- Design of Staircase: 1.load CalculationDokumen6 halamanDesign of Staircase: 1.load CalculationIts meBelum ada peringkat
- Displacement MethodDokumen27 halamanDisplacement Methodvgsantos123Belum ada peringkat
- WEEK 1 - Introduction of Determinate and Indeterminate StructureDokumen11 halamanWEEK 1 - Introduction of Determinate and Indeterminate StructureRaziz RashidBelum ada peringkat
- Masonry Tutorial PDFDokumen2 halamanMasonry Tutorial PDFRabindraUpretiBelum ada peringkat
- IPE Section Properties PDFDokumen1 halamanIPE Section Properties PDFpaolocparreraBelum ada peringkat
- Example On The Analysis of Statically Determinate FramesDokumen8 halamanExample On The Analysis of Statically Determinate FramesJaaferBelum ada peringkat
- Structural Design Analysis Principles Loads Factors SafetyDokumen25 halamanStructural Design Analysis Principles Loads Factors SafetykozmologBelum ada peringkat
- Wind Speed in Sri Lanka PDFDokumen15 halamanWind Speed in Sri Lanka PDFsandrock92100% (1)
- Portal and Cantilever MethodsDokumen4 halamanPortal and Cantilever MethodsMichaella Bianca De GuzmanBelum ada peringkat
- Structural Analysis II Notes Rev1Dokumen106 halamanStructural Analysis II Notes Rev1Chris Jansen Van Rensburg100% (1)
- Structural DesignDokumen55 halamanStructural Designapril rose biluganBelum ada peringkat
- Design of Reinforced Concrete Shear WallDokumen8 halamanDesign of Reinforced Concrete Shear WallklynchelleBelum ada peringkat
- Wind UBCDokumen6 halamanWind UBCLivian TeddyBelum ada peringkat
- CE 809 - Lecture 6 - Response of SDF Systems To General Dynamic LoadingDokumen45 halamanCE 809 - Lecture 6 - Response of SDF Systems To General Dynamic LoadingArslan UmarBelum ada peringkat
- Retrofitting Analysis and Design of Two Storey School BuildingDokumen1 halamanRetrofitting Analysis and Design of Two Storey School BuildingPrakash Singh Rawal100% (1)
- British Problem 5 PDFDokumen5 halamanBritish Problem 5 PDFelixnzBelum ada peringkat
- Structural Analysis TechniquesDokumen82 halamanStructural Analysis TechniquesZain AmirBelum ada peringkat
- Design and Analysis of Seismic Resistant Apartment BuildingDokumen12 halamanDesign and Analysis of Seismic Resistant Apartment BuildingMunzuara AktherBelum ada peringkat
- Design of TowerDokumen4 halamanDesign of Towersyedbaseer100% (1)
- Pile testing report for 300mm diameter pilesDokumen1 halamanPile testing report for 300mm diameter pilesNimish PrabhukhanolkarBelum ada peringkat
- Twowayslab Design Type-ADokumen21 halamanTwowayslab Design Type-Akathir1965Belum ada peringkat
- Water Usage ChartDokumen4 halamanWater Usage ChartSenghou MeasBelum ada peringkat
- Staad - Pro-V8i (Advanced) - Video TrainingDokumen4 halamanStaad - Pro-V8i (Advanced) - Video TrainingSmartlearning TechnologyBelum ada peringkat
- Truss Design - Faculty Wing - EN1993Dokumen13 halamanTruss Design - Faculty Wing - EN1993JonathanBelum ada peringkat
- Unit-IV-Shear Reinforcement and Bond by Limit State MethodDokumen50 halamanUnit-IV-Shear Reinforcement and Bond by Limit State MethodAshish KaleBelum ada peringkat
- Calculation Sheets NZS 3604Dokumen5 halamanCalculation Sheets NZS 3604TuroyBelum ada peringkat
- Analysis and Design of (G+100) Storied Building by Using SoftwareDokumen3 halamanAnalysis and Design of (G+100) Storied Building by Using SoftwareInternational Journal of Innovations in Engineering and ScienceBelum ada peringkat
- Calculation NoteDokumen10 halamanCalculation NoteJay EvansBelum ada peringkat
- RCC Design TipsDokumen9 halamanRCC Design Tipssatoni12Belum ada peringkat
- SAFE VerificationDokumen7 halamanSAFE VerificationRahul AggarwalBelum ada peringkat
- Col PedDokumen1 halamanCol PedMark Christian EsguerraBelum ada peringkat
- Staircase Design CalculationDokumen6 halamanStaircase Design CalculationSwapnil ToraskarBelum ada peringkat
- Static &dynamic Analysis of Multistory Building Using Composite StructureDokumen15 halamanStatic &dynamic Analysis of Multistory Building Using Composite Structureachmad yakusaBelum ada peringkat
- Steel BuildingsDokumen41 halamanSteel BuildingsAb van AlfenBelum ada peringkat
- Seismic Analysis of Multi-Story RC BuildingsDokumen15 halamanSeismic Analysis of Multi-Story RC BuildingsPrakash Channappagoudar100% (1)
- Topic 1 - Introduction To Ecs 228Dokumen19 halamanTopic 1 - Introduction To Ecs 228Safwan ZothBelum ada peringkat
- Determinacy and Stability of Structures: Theory of Structure - IDokumen28 halamanDeterminacy and Stability of Structures: Theory of Structure - IGhaffar LaghariBelum ada peringkat
- UntitledDokumen30 halamanUntitledreema omarBelum ada peringkat
- ES 122 NotesDokumen4 halamanES 122 NotesronieBelum ada peringkat
- 04 - Analysis of Beams Using Matrix Stiffness MethodDokumen43 halaman04 - Analysis of Beams Using Matrix Stiffness MethodRyiehmBelum ada peringkat
- Stress Analysis Problems in S.I. Units: The Commonwealth and International Library: Mechanical Engineering DivisionDari EverandStress Analysis Problems in S.I. Units: The Commonwealth and International Library: Mechanical Engineering DivisionPenilaian: 2.5 dari 5 bintang2.5/5 (4)
- Design of Structural Steel Pipe Racks PDFDokumen12 halamanDesign of Structural Steel Pipe Racks PDFmobin1978100% (3)
- Basic Welding SymbolsDokumen15 halamanBasic Welding SymbolsjeanniemanaloBelum ada peringkat
- Atlas Engineering Metals HandbookDokumen136 halamanAtlas Engineering Metals HandbookMatt KurtzeBelum ada peringkat
- Masonry AnchorsDokumen17 halamanMasonry AnchorsjeanniemanaloBelum ada peringkat
- Building Code of The PhilippinesDokumen43 halamanBuilding Code of The PhilippinesjeanniemanaloBelum ada peringkat
- Electric Charges and FieldsDokumen7 halamanElectric Charges and FieldsSankar KumarasamyBelum ada peringkat
- RF Behaviour of Passive ComponentsDokumen4 halamanRF Behaviour of Passive ComponentsAmbbiga JaiBelum ada peringkat
- Nucl - Phys.B v.574Dokumen861 halamanNucl - Phys.B v.574buddy72Belum ada peringkat
- Comp 2020 Btest-7 Set A PDFDokumen43 halamanComp 2020 Btest-7 Set A PDFAYUSH NAIKBelum ada peringkat
- Axially Loaded Members PDFDokumen50 halamanAxially Loaded Members PDFCharbel Saad SaadBelum ada peringkat
- Siemens Vacumm Contactor 3tl6Dokumen15 halamanSiemens Vacumm Contactor 3tl6Yong Ee VonnBelum ada peringkat
- Ce161p A88 q1 MakeupDokumen1 halamanCe161p A88 q1 MakeupRam RamirezBelum ada peringkat
- MOTOR BASES FOR INDUSTRIAL APPLICATIONSDokumen8 halamanMOTOR BASES FOR INDUSTRIAL APPLICATIONSbogdanalaciBelum ada peringkat
- Konsep Base Isolation dalam Perencanaan Bangunan Tahan GempaDokumen56 halamanKonsep Base Isolation dalam Perencanaan Bangunan Tahan GempaNobi SetiawanBelum ada peringkat
- CBSE Grade 12 Physics Project 2015: Refractive Indices of Some Common LiquidsDokumen24 halamanCBSE Grade 12 Physics Project 2015: Refractive Indices of Some Common LiquidsSyed Husam100% (1)
- 4 Mass Transfer Coefficients PDFDokumen17 halaman4 Mass Transfer Coefficients PDFYee LingBelum ada peringkat
- Corrosion 2Dokumen8 halamanCorrosion 2alyBelum ada peringkat
- P30 Unit Three Diploma ReviewDokumen30 halamanP30 Unit Three Diploma ReviewhelloBelum ada peringkat
- Relativistic precession of planetary orbitsDokumen5 halamanRelativistic precession of planetary orbitsdaveBelum ada peringkat
- Grade 9 Lesson Plan 01Dokumen2 halamanGrade 9 Lesson Plan 01RahmonGreenBelum ada peringkat
- Introduction EM Waves WorksheetDokumen3 halamanIntroduction EM Waves WorksheetUmer AbdullahBelum ada peringkat
- Microwave Engineering SyllabusDokumen3 halamanMicrowave Engineering SyllabusnatashaBelum ada peringkat
- Statics of Rigid BodiesDokumen12 halamanStatics of Rigid BodiesJoanne-chan Mingi100% (1)
- Spreadsheet - Gas Blanketed Tanks - Outbreathing Process Calculations & Control Valve Sizing - Rev2Dokumen33 halamanSpreadsheet - Gas Blanketed Tanks - Outbreathing Process Calculations & Control Valve Sizing - Rev2MaheshBelum ada peringkat
- Effective Nuclear ChargeDokumen3 halamanEffective Nuclear Chargekalloli100% (1)
- 2D Analysis of Naca-2406 Airfoil by Ansys and XfoilDokumen10 halaman2D Analysis of Naca-2406 Airfoil by Ansys and XfoilPrabowo Galih MBelum ada peringkat
- 18 MN216 Fluid Mechanics IDokumen2 halaman18 MN216 Fluid Mechanics Ijorge luisBelum ada peringkat
- Binding QDokumen5 halamanBinding Qpraveen alwisBelum ada peringkat
- StewartCalcET8 14 04Dokumen18 halamanStewartCalcET8 14 04OhoodKAlesayiBelum ada peringkat
- Feni: Formation and Reversal of Silicon: Egil J.M. Jahnsen July 4, 2007Dokumen21 halamanFeni: Formation and Reversal of Silicon: Egil J.M. Jahnsen July 4, 2007Egil JahnsenBelum ada peringkat
- Lectures PDFDokumen137 halamanLectures PDFFrancis Clinton Prashanth100% (1)
- Energy - Wikipedia, The Free EncyclopediaDokumen15 halamanEnergy - Wikipedia, The Free EncyclopediaJay SrivastavaBelum ada peringkat
- Basic Electrical Engineering: BY R. Sivaprasad, Lecturer in Eee, Govt. Polytechnic, SatyaveduDokumen77 halamanBasic Electrical Engineering: BY R. Sivaprasad, Lecturer in Eee, Govt. Polytechnic, Satyavedurathina4careerBelum ada peringkat