Anda mungkin juga menyukai
- 15m TugboatDokumen8 halaman15m TugboatnavalarchmarineBelum ada peringkat
- Designing Dredging Equipment CSDDokumen79 halamanDesigning Dredging Equipment CSDedraket145Belum ada peringkat
- DamenDredgingEquipment CSDfolder Jan 2013Dokumen2 halamanDamenDredgingEquipment CSDfolder Jan 2013novian_ivanBelum ada peringkat
- Specs 1270-33 18 X 18Dokumen22 halamanSpecs 1270-33 18 X 18Hery Mardiono Hery100% (2)
- KG2Dokumen3 halamanKG2anon_697917996Belum ada peringkat
- Damen-CSD Cutter Suction DredgersDokumen31 halamanDamen-CSD Cutter Suction DredgersGabriel Muñoz VargasBelum ada peringkat
- 16-Inch DSC Cutter Suction DredgerDokumen4 halaman16-Inch DSC Cutter Suction DredgerAchmad AfandiBelum ada peringkat
- Operation & Maintenance ManualDokumen21 halamanOperation & Maintenance ManualMohammed BasionyBelum ada peringkat
- Towing Winch Emergency Release Systems-Cu Aplicare Din 2020Dokumen4 halamanTowing Winch Emergency Release Systems-Cu Aplicare Din 2020tonyBelum ada peringkat
- Bow Thruster Installation InstructionsDokumen9 halamanBow Thruster Installation InstructionsRovert AlonzoBelum ada peringkat
- Beaver 45 - Especificaão TécnicaDokumen2 halamanBeaver 45 - Especificaão TécnicaLenin ValerioBelum ada peringkat
- 3t Monorail Provision CraneDokumen21 halaman3t Monorail Provision CranesridharBelum ada peringkat
- ROCOR NB LIQUID MsdsDokumen14 halamanROCOR NB LIQUID MsdsjakariaBelum ada peringkat
- Putri Iona - Survey StatusDokumen28 halamanPutri Iona - Survey StatusDiana Triswasti KumariBelum ada peringkat
- PM Speed Adjusting Motor For PSGDokumen2 halamanPM Speed Adjusting Motor For PSGFathima Regin100% (2)
- 4AD126TI - Dooson - EM'CY GENERATORDokumen62 halaman4AD126TI - Dooson - EM'CY GENERATORLeonid KolesnikovBelum ada peringkat
- Floating DrydockDokumen1 halamanFloating DrydockAhmed TarekBelum ada peringkat
- Conmaco 385 Winch ManualDokumen44 halamanConmaco 385 Winch ManualdarioBelum ada peringkat
- 45m Ferry - Equipment List - Rev 1Dokumen3 halaman45m Ferry - Equipment List - Rev 1bdthanhvkct100% (1)
- Marine Engineering System CODAG and SystemDokumen9 halamanMarine Engineering System CODAG and SystemIkhwan Azizie100% (2)
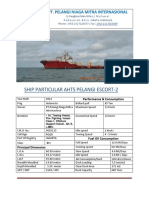
- Ship Particular Ahts-Pe-2Dokumen6 halamanShip Particular Ahts-Pe-2Muhammad RIZALBelum ada peringkat
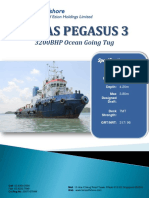
- Teras Pegasus 3 Specs & GA - Updated 26.11.13 PDFDokumen3 halamanTeras Pegasus 3 Specs & GA - Updated 26.11.13 PDFSanieBurhanBelum ada peringkat
- Beaver 1200C 02Dokumen2 halamanBeaver 1200C 02Rheyza Gigih PrakosoBelum ada peringkat
- Data Steering GearDokumen32 halamanData Steering GearBaris AkgülBelum ada peringkat
- Calculation of The Machinery of Anchor, Windlass, Rudder, Loading-Unloading and Weight of The Construction and MachineriesDokumen18 halamanCalculation of The Machinery of Anchor, Windlass, Rudder, Loading-Unloading and Weight of The Construction and MachineriesSidan MagnaBelum ada peringkat
- Structural Analysis of Hopper Suction DredgerDokumen10 halamanStructural Analysis of Hopper Suction DredgerIvan GrbavacBelum ada peringkat
- Topaz Legend Vessel SpecsDokumen6 halamanTopaz Legend Vessel SpecsJym GensonBelum ada peringkat
- 87.90m Platform Supply Vessel: Intan Offshore Pte LTD 19, Pandan Road Singapore 609271Dokumen4 halaman87.90m Platform Supply Vessel: Intan Offshore Pte LTD 19, Pandan Road Singapore 609271Wahyu KyozukeBelum ada peringkat
- Damen Booster Station 500Dokumen2 halamanDamen Booster Station 500Carlos Marcelo CostaBelum ada peringkat
- Technical Form 11 - Facilities & Equipment (Rev.1)Dokumen44 halamanTechnical Form 11 - Facilities & Equipment (Rev.1)HoanBelum ada peringkat
- Scania Technical Data - Issue-13Dokumen51 halamanScania Technical Data - Issue-13kman548Belum ada peringkat
- Cummins Hylyzer 250 SpecsheetDokumen2 halamanCummins Hylyzer 250 SpecsheetamsukdBelum ada peringkat
- List of Ship CertificateDokumen3 halamanList of Ship CertificateBrian PhamBelum ada peringkat
- Arneson Surface Drives CatalogueDokumen12 halamanArneson Surface Drives CatalogueWoodsy12Belum ada peringkat
- Brochure Damen Dredging PDFDokumen34 halamanBrochure Damen Dredging PDFCarlos Marcelo CostaBelum ada peringkat
- Shinko Ind. LTD.: ProductDokumen1 halamanShinko Ind. LTD.: ProductTomiBelum ada peringkat
- REC 099 Rev1 pdf2101Dokumen30 halamanREC 099 Rev1 pdf2101jmcollado1974Belum ada peringkat
- MS150119 00eDokumen139 halamanMS150119 00eeng_moh04Belum ada peringkat
- Machine Card WM 113Dokumen2 halamanMachine Card WM 113Carlos Figueredo100% (1)
- HLRM90 5SDokumen2 halamanHLRM90 5SAna HafidzBelum ada peringkat
- Anx B Specification Dovra-2-2013Dokumen33 halamanAnx B Specification Dovra-2-2013agusfaizinBelum ada peringkat
- Quality Control Measurement Report Subject: Propeller Push Up. Rudder & Propeller Section Nord HoustonDokumen2 halamanQuality Control Measurement Report Subject: Propeller Push Up. Rudder & Propeller Section Nord HoustonAhmed Magdy100% (1)
- 3-PAKKET INHOUD - Hydraulic Control Instruction and RequirementsDokumen11 halaman3-PAKKET INHOUD - Hydraulic Control Instruction and Requirementsphankhoa83-1Belum ada peringkat
- Dredger SpecificationsDokumen8 halamanDredger SpecificationsSherin Shihabudeen100% (2)
- Specifications Laguna StarDokumen2 halamanSpecifications Laguna StarVictor RamosBelum ada peringkat
- Ffianra: Existing ModificationDokumen128 halamanFfianra: Existing ModificationGary ChanBelum ada peringkat
- FP 33 Fast Patrol Craft DatasheetDokumen1 halamanFP 33 Fast Patrol Craft DatasheetNico BossiBelum ada peringkat
- 32p Neda Dry CargoDokumen36 halaman32p Neda Dry CargoFandy SipataBelum ada peringkat
- Engieering Standars For FIFI Vessel PDFDokumen32 halamanEngieering Standars For FIFI Vessel PDFEmad JamshidiBelum ada peringkat
- Check List Commissioning Report For Genset&AuxilaryDokumen12 halamanCheck List Commissioning Report For Genset&AuxilaryBoris SitorusBelum ada peringkat
- Caterpillar 3412 Marine Engine Details, Specs, Features & ExtrasDokumen5 halamanCaterpillar 3412 Marine Engine Details, Specs, Features & ExtrasTobias Bengtsen100% (1)
- 10te Air TuggerDokumen1 halaman10te Air TuggerjohariakBelum ada peringkat
- Schemas Alphatron Principe Instru Navigtableau de Bord - 3923714 - 1 - A) - 1 PDFDokumen54 halamanSchemas Alphatron Principe Instru Navigtableau de Bord - 3923714 - 1 - A) - 1 PDFakrealphonseBelum ada peringkat
- G01 General Arrangement (27M TUG)Dokumen1 halamanG01 General Arrangement (27M TUG)Ahmad RezkaBelum ada peringkat
- Accommodation Barge 299 PAX With AccoDokumen3 halamanAccommodation Barge 299 PAX With AccoPrabhakar Tiwari100% (1)
- Apnashipyard and Heavy Industries PVT LTD Project PlanDokumen72 halamanApnashipyard and Heavy Industries PVT LTD Project Planhimadri.banerji60Belum ada peringkat
- Final DWG ListDokumen17 halamanFinal DWG ListCezary0% (1)
- DLU TechDokumen20 halamanDLU Techqwerty_conanBelum ada peringkat
- SECTION 3.3 - WET RISER SYSTEM Rev. 1Dokumen33 halamanSECTION 3.3 - WET RISER SYSTEM Rev. 1يوسف محمد صالحBelum ada peringkat
- Pipeline Rules of Thumb Handbook: A Manual of Quick, Accurate Solutions to Everyday Pipeline Engineering ProblemsDari EverandPipeline Rules of Thumb Handbook: A Manual of Quick, Accurate Solutions to Everyday Pipeline Engineering ProblemsPenilaian: 4.5 dari 5 bintang4.5/5 (10)
- 3424 Ethylene Cryo GuideDokumen100 halaman3424 Ethylene Cryo GuidePeter John PackiarajBelum ada peringkat
- 1501 CarbCounter OnlineDokumen29 halaman1501 CarbCounter OnlineShirley HoBelum ada peringkat
- Pub105 CrewHabitability OffshoreDokumen85 halamanPub105 CrewHabitability OffshorePeter John PackiarajBelum ada peringkat
- Blackberry Desktop Software For PC Version 6.1 User GuideDokumen51 halamanBlackberry Desktop Software For PC Version 6.1 User GuideBlackBerryRocks.comBelum ada peringkat
- c32-1000 BHP Spec SheetDokumen6 halamanc32-1000 BHP Spec SheetPeter John Packiaraj100% (1)
- Probabilistic DamageDokumen54 halamanProbabilistic DamagePeter John PackiarajBelum ada peringkat
- Grab Hopper DredgerDokumen40 halamanGrab Hopper DredgerPeter John Packiaraj100% (1)
- AMSA StabilityDokumen25 halamanAMSA Stabilitybhaswath2000100% (1)
- Big Ship ShipbuildingDokumen37 halamanBig Ship ShipbuildingPeter John PackiarajBelum ada peringkat
- 3.1 - Worksheet 3 - Gravitational FieldDokumen4 halaman3.1 - Worksheet 3 - Gravitational FieldTinboyBelum ada peringkat
- GCSE Motion QuestionsDokumen28 halamanGCSE Motion QuestionspixelhoboBelum ada peringkat
- 7-2 Newton's Law of Universal GravitationDokumen2 halaman7-2 Newton's Law of Universal GravitationHajar ElKheroua Askour100% (2)
- NASA-Derivation and Definition of A Linear Aircraft ModelDokumen41 halamanNASA-Derivation and Definition of A Linear Aircraft ModelcarrascovalienteBelum ada peringkat
- Vectors and Scalars Calculation WSDokumen5 halamanVectors and Scalars Calculation WSboobooBelum ada peringkat
- EVU Firenze 2013Dokumen273 halamanEVU Firenze 2013Andrijana Jovic100% (1)
- CamsDokumen37 halamanCamsSuhan50% (2)
- Kom ReportDokumen18 halamanKom ReportNamanBelum ada peringkat
- Faraday LawDokumen6 halamanFaraday LawRiff ShahBelum ada peringkat
- The Viscosity of The Lower Mantle: D - P. MckenzieDokumen16 halamanThe Viscosity of The Lower Mantle: D - P. Mckenziedai_erenBelum ada peringkat
- CH 07Dokumen27 halamanCH 07Jessica Ibarreta100% (1)
- Magnetic FieldDokumen29 halamanMagnetic FieldJagdip ShethBelum ada peringkat
- Pub Essential University Physics 2nd EditionDokumen781 halamanPub Essential University Physics 2nd EditionAnthony Betancourth100% (3)
- S Distance/time D / T V Displacement/timeDokumen4 halamanS Distance/time D / T V Displacement/timeOscar Herrera100% (1)
- Cdhde Ethercat Fw2.1.x Rev.0.0.1-EnDokumen255 halamanCdhde Ethercat Fw2.1.x Rev.0.0.1-Enpham linhBelum ada peringkat
- Save My Exams Mechanics 3Dokumen28 halamanSave My Exams Mechanics 3ezzahjvBelum ada peringkat
- Relationship of Sine Theta and AccelerationDokumen3 halamanRelationship of Sine Theta and AccelerationJames GaaBelum ada peringkat
- General Physics 1 1st Quarter Module 1 ActivitiesDokumen16 halamanGeneral Physics 1 1st Quarter Module 1 ActivitiesMica LopezBelum ada peringkat
- Motion (Freely Falling Bodies and Projectile Motion) : Course Learning OutcomesDokumen9 halamanMotion (Freely Falling Bodies and Projectile Motion) : Course Learning OutcomesYoo JungBelum ada peringkat
- 2016 3 1 4 ClucasDokumen18 halaman2016 3 1 4 ClucasAhmed S. El DenBelum ada peringkat
- PRACTICE SHEET - 02 (Physics)Dokumen4 halamanPRACTICE SHEET - 02 (Physics)ABD 17Belum ada peringkat
- Ap Phys1 - Dynamics 2 D - 2020 10 22Dokumen268 halamanAp Phys1 - Dynamics 2 D - 2020 10 22Elizabeth RankinBelum ada peringkat
- WWW - Ib.academy: Study GuideDokumen95 halamanWWW - Ib.academy: Study GuideGag PafBelum ada peringkat
- Chap 08 SMDokumen116 halamanChap 08 SMShaniceNezBelum ada peringkat
- 2020 4U - Parramatta Marist - Trial Paper (With Solutions)Dokumen28 halaman2020 4U - Parramatta Marist - Trial Paper (With Solutions)Reacher ElliotBelum ada peringkat
- Design Thinking Infographics by SlidegoDokumen6 halamanDesign Thinking Infographics by SlidegoSumit KashyapBelum ada peringkat
- Grade 11 Physics Course OutlineDokumen3 halamanGrade 11 Physics Course OutlineAaron DiasBelum ada peringkat
- CH01 - Kinematics of A ParticleDokumen80 halamanCH01 - Kinematics of A ParticleToby IsabiBelum ada peringkat
- AP Physics 1 Practice Test 1Dokumen17 halamanAP Physics 1 Practice Test 1Mohamed MohamedBelum ada peringkat
- NCERT Solutions For Class 11 Physics Chapter 5 - Law of Motion - .Dokumen36 halamanNCERT Solutions For Class 11 Physics Chapter 5 - Law of Motion - .kaushikvanshika06Belum ada peringkat