Unsupervised Land Cover Classification of SAR
Images by Contour Tracing
V.V.Chamundeeswari, D.Singh, K.Singh
Department of Electronics & Computer Engineering
Indian Institute of Technology Roorkee
Roorkee, India
e-mail: vjcsedec@iitr.ernet.in, dharmfec@iitr.ernet.in, ksconfcn@iitr.ernet.in
Abstract— The potentiality of Synthetic Aperture Radar (SAR) requires training samples and a priori information about the
Images for land cover mapping is an important area of research. region like digital elevation map etc. Unsupervised
For Single band, single polarized SAR Image, information is classification of SAR images requires no a priori information
available in the form of Intensity and texture only. Land cover about the image. For segmentation and labeling of classes, the
classification of SAR Images requires exploitation of spatial algorithm extracts information from the image itself. In this
relationship of pixels also, in addition to pixel level segmentation. paper, we present an algorithm for unsupervised classification
SAR image can be segmented successfully if the regions with of SAR images by block based segmentation and contour
homogeneous intensity and texture areas can be identified and tracing. We segment the SAR image into monotone, texture
grouped together. So far, contour tracing has been used only in areas and edges. The monotone and textural regions are also
demarcating sea and land. Identifying contours in a domesticated differentiated according to intensity and textural patterns.
area with a mixture of water, urban and vegetation areas require
MRFs (Markov Random Field) have been used to model image
complex analysis of spatial distribution of pixels. In this paper,
textural features [1]. But the main drawback of MRF
we have presented an unsupervised classification algorithm using
Maximum a posteriori (MAP) segmentation for SAR images in
algorithms is that the fine structures like 1-3 pixel wide line
which SAR image is classified into monotone, texture and edge segments may disappear partially or entirely and region borders
regions. Monotone and textured regions are labeled as land cover are not precisely located. Statistical Image model may not be
types like water, urban and vegetation areas using K-means accurate enough and classes are overlapped in the feature
classification. SAR Image of the region with latitude varying space. This results in some confusion in data classification in
from 77.86º to 77.91º and longitude varying between 29.89 º and homogenous areas as well as at region borders or close to fine
29.85 º of Haridwar region, India is considered for segmentation. structures. Other popular methods for the analysis of image
We have compared the segmented image obtained by this texture are Gray level cooccurence matrix (GLCM) [2], Gabor
methodology with the topographic map of the corresponding wavelets [3], tree structured wavelets [4], wavelet packets [5]
region. The water, urban and vegetation areas are clearly etc. Randen et al [6] compares performance of general texture
recognized with proposed classification approach which analysis schemes. GLCM features were found to be more
represents a very good agreement with the original topographic sensitive to texture boundaries compared to MRF. GLCM
sheet . provided better classification accuracy for optical images [7].
Niedermeier [8] has used wavelet decomposition and contour
Keywords- Unsupervised, SAR segmentation, Contour tracing, tracing algorithm for coastline extraction. Active contour
MAPestimation, texture segmentation, block based SAR tracing algorithm with filling/removing loops was employed to
segmentation. identify coastlines. Niedermeier has developed contour tracing
only to separate sea from land area. Identifying contours in a
I. INTRODUCTION mixed area with urban, water and vegetation require complex
Land cover mapping using SAR images is an important analysis of spatial data.
area of research. Since SAR sensors provide all-time and all- In this paper, we approach SAR image segmentation
weather surveying, potentiality of using SAR images in various problem as block based segmentation. SAR image is divided
applications like land cover classification, object detection is to into blocks. Then, each block is analyzed for its homogeneity
be explored. Classification of land cover into classes like water, of gray levels, textural patterns and edges. Blocks are grouped
urban and vegetation helps in planning and management of and labeled according to their characteristics. Edge blocks are
urban regions, such as sustainable development and smart checked for its continuity and contour is traced. Edge
growth. Segmentation is a basic technique of digital image connectivity helps in removal of noise and improves
processing with an ultimate goal of improving an image for classification accuracy. Region labeling is done to connect
subsequent analysis and scene description. An image can be adjacent homogenous blocks. In this process, any isolated
segmented in to classes based on gray levels, textures, edges homogenous or edge blocks with small regions are labeled as
etc. A single band and single polarized SAR image contain undecided. These undecided blocks are assigned to the
information only in the form of intensity and texture. neighbouring homogenous regions in the final step. K-means
Segmentation of single band, single polarized SAR image is classification is performed on the block based segmented
approached by two classical techniques: Supervised and image and water, urban and vegetation areas are identified.
Unsupervised. Supervised classification of SAR Images
1-4244-1212-9/07/$25.00 ©2007 IEEE. 547
Authorized licensed use limited to: BANARAS HINDU UNIVERSITY. Downloaded on October 18, 2008 at 02:39 from IEEE Xplore. Restrictions apply.
The proposed method is described in Section II, including x* = argmax P( X = x Y = y)
Block based MAP(Maximum a posteriori) and texture
differentiation by wavelets, Section III presents the = argmax[ln P(Y = y X = x) + ln P(X = x)]
experimental results on a SAR image. Finally, Section IV
provides conclusion of the paper. G Rg
= argmax ∑ ∑− lnσ~tg2 + ∑Vc ( x) + constant
t∈ΩA g=1 2 c∈C
II. THE PROPOSED METHOD
---(1)
A. Block based Segmentation
The overall classification methodology is depicted in Fig. 1. Rg
where denotes the total number of pixels in the gth
For the analysis of block based image segmentation, the input
σ~tg2
image of size N1 × N 2 is divided into non-overlapping small area of the block separated by an edge and is the closed
square blocks with a s × s dimension. Then, there are σ
form expressed ML estimate of tg . G represents the total
n1 × n2 blocks in the image, where n1 = N1 / s number of distinctive areas in the block. constant represents
constant value which is not affecting maximization. For all
and n2 = N 2 / s . Each of the blocks has to be identified as edge blocks, there will be two distinct areas within the blocks
monotone, texture and edge blocks. As the first step, mean and separated by the edges. Vc(x) is the clique potential for a clique
variance are computed for every block for identifying
monotone blocks. If variance is less than 2% of its mean c, and C is the set of all cliques in Ω A associated with the
intensity, then the image is classified as monotone blocks. In neighborhood system [11]. Concepts of clique potentials and
the second step, blocks with horizontal, vertical and diagonal computing clique potential using Gibbs distribution is
edges are recognized and grouped as edge blocks. Let X denote explained in [11].
2-D random field representing an image configuration
composing of all image characteristics (ie. Monotone, texture
or one of various edge blocks). Input Image
X = {X t = xt t ∈ Ω A , xt ∈ {0,1,2,..K }}
Then , where Division of image to
Ω A = {(i, j ) i = 1,2..n1, j = 1,2...n2 }
equal sized image
blocks
denotes the set of all
block indices. When the random variable Xt has a value xt =k, Calculation of mean
then it implies that the block at t ∈ Ω A has the block
Intensity and Variance
for each image block
characteristics defined by the block label k. The block labels k
corresponds to the various edges as follows: For vertical edge, Check for Var<2% of Blocks labelled as
k=0, horizontal edge, k=1, diagonal edges in +45 and -45 mean intensity Monotone
degrees correspond to k=2 and k=3 respectively. Y is defined
as the random field for the set of all observed gray-levels in horizontal, vertical
Edge block labeling
Ω . Then, the observed image data can be written as Y=y and by MAP
and diagonal edge
{ } where
blocks are labelled
y = yij (i, j ) ∈ Ω A y ijB
is the set of all gray levels Extraction of Textural
in the image block located at (i, j ) ∈ Ω A .
feature vectors
For identifying and labeling edge blocks, maximum a Comparing textural Blocks labelled as
feature vectors Texture
posteriori distribution is used. Aim is to find the block label
configuration x* that maximizes the a posteriori probability Region labeling
P(X/Y). Then, according to Bayesian formulation, the optimal
block label configuration is obtained by equivalently K-means
maximizing the following criterion for all possible x [9-10]. Classification
For any edge block, two distinctive areas represented as g=1
and g=2 is present. For any edge block, the mean intensity
level in g=1 is different from that of g=2. G is taken as the total Classified Image
distinctive areas in the region. For G=1, those blocks are
grouped as monotone blocks. Figure 1.
Classification Methodology
Once monotone and edge blocks are identified, all the
remaining blocks can be considered as texture blocks. For all
these texture blocks, feature vectors are extracted to
differentiate various texture patterns. Wavelet transform is used
1-4244-1212-9/07/$25.00 ©2007 IEEE. 548
Authorized licensed use limited to: BANARAS HINDU UNIVERSITY. Downloaded on October 18, 2008 at 02:39 from IEEE Xplore. Restrictions apply.
to represent the textural features. Daubechies (dB4) wavelet The geo-referenced and speckle suppressed SAR image is
transform is applied on every image block. dB4 wavelet of size 302 x 302. Then, this image is divided into image
decomposition results in four components, high pass, low pass, blocks of dimension 2 x 2 leading to 151 x 151 blocks. Then,
a horizontal and a vertical component. For every image block, mean intensity and variance are computed for individual
textural feature vector is represented as blocks. The threshold for variance with mean intensity is
{Tijl i = 1,2..n1 , j = 1,2..n2 , l = 1,2,3,4}
where (i,j)
checked and monotone blocks are identified. Then, using MAP
based segmentation, edge blocks of labels horizontal, vertical
represents the block index and l represents the wavelet and diagonal edges are identified. Daubechies wavelet
component of the image block. transform is applied on the image and textural features are
captured. Wavelet coefficients are compared to identify
B. Region Labeling different texture patterns. All the image blocks are thus labeled
Once the image blocks are identified as monotone, texture as one of monotone, texture and edge blocks where every
and edge blocks, and the blocks adjacent to each other and monotone and texture pattern is labeled. Region labeling is
have the same intensity and texture are connected and a performed to connect adjacent blocks with similar intensity and
common region label is provided. For each block, eight texture patterns. Eight neighborhood connectivity is used for
neighborhood connectivity is checked for its adjacency with checking the adjacency. All neighboring regions with similar
neighboring blocks. For connecting monotone blocks, mean intensity and texture properties are merged and thus provide an
and variance form the feature vector and textural blocks, unsupervised segmented image with three types of regions,
textural feature vector comprising of its db4 wavelet namely monotone, texture and edge regions. Now, K-means
components is used for comparing the adjacent texture blocks. classification is used to classify the segmented image into
Only similar block types are compared for adjacency and water, urban and vegetation areas. For computing
merged together to form the same region. Let the feature vector classification accuracy, ground truth points representing water,
be represented as Fij where i,j are block indices. The two urban and vegetation areas are taken for reference from
neighboring blocks (i,j) and (i+1,j) belong to the same region if topographic sheet. The table 1 below shows the confusion
the following condition is satisfied. matrix generated for the classified image by our methodology.
2
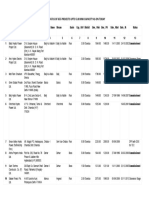
Overall Accuracy= 95.3971%
Fij − Fi +1, j <T ---(2)
TABLE I. CONFUSION MATRIX
For every region thus connected, label or region number is
given so that each region by the end of this process represents Sl.No Class Ground Truth (Percent)
Water Urban Vegetation
the distinct monotone and texture regions. Edge blocks are not
considered in this process. 1 Water 95.94 0.00 1.65
2 Urban 0.00 92.23 0.00
C. K-means classification
3 Vegetation 4.06 7.77 98.35
All image blocks present in the entire image are identified
either as monotone, texture or edge blocks and blocks with Total 100.00 100.00 100.00
similar characteristics adjacent to each other are merged and
regions are labeled. K-means classification is applied on the
segmented image to identify water, urban, vegetation and other
unclassified areas. TABLE II. COMMISSION &OMISSION ERROR
Sl.No Class Commission Omission
III. RESULTS AND DISCUSSION Error (percent) Error
(percent)
The ERS-2 SAR-C band image acquired on July, 2001 was
taken as input image. Since, SAR images are acquired in the 1 Water 1.78 4.06
microwave region of electromagnetic spectrum, visual 2 Urban 0.00 7.77
identification of ground control points is very difficult. Thus,
ERS-2 SAR image is geo-referenced to geographical 3 Vegetation 11.17 1.65
coordinates using eight ground control points (four at the
corners, one at center of the image and three from TABLE III. PRODUCER AND USER ACCURACY
topographical map). A first order polynomial transformation
function and the nearest neighbor re-sampling technique have Sl.No Class Producer’s User’s
been used to perform geo referencing. Subset of SAR image Accuracy Accuracy
(percent) (percent)
with latitudes and longitudes ranging from (77.86,29.89) to
(77.91,29.85) is chosen for implementation of methodology. 1 Water 95.94 98.22
Adaptive Lee filter is used for speckle suppression. Lee filter is 2 Urban 92.23 100.00
able to smooth away noise in flat regions, but leave fine details
unchanged [12]. 3 Vegetation 98.35 88.83
1-4244-1212-9/07/$25.00 ©2007 IEEE. 549
Authorized licensed use limited to: BANARAS HINDU UNIVERSITY. Downloaded on October 18, 2008 at 02:39 from IEEE Xplore. Restrictions apply.
measures between class discrimination and results when one
class on the ground is misidentified as other class by the
observing classifier. Hence, 1.78% of water pixels are
improperly labeled as water pixels and 4.06 % of water pixels
are misidentified as other land type. The total number of
correct pixels in a category is divided by the total number of
pixels of that category as derived from the reference data (i.e.
Column total) is termed as “Producer’s accuracy” because the
producer of the classification is interested in how well a certain
area is classified. On the other hand, if the total number of
Figure 2. correct pixels in a category is divided by the total number of
Raw SAR Image of the study area pixels that were classified in that category, this measure is
called “User’s accuracy”. The producer of the map can claim
that 95.94% of the time an area is identified as water was
identified as such, a user of this map will find that 98.22% of
Water
the time will an area he visits that the map says is water will
actually be water. Thus, classification of single band, single
polarized SAR image is performed by block based
Urban segmentation and contour tracing. The results are compared
with topographic sheet.
Vegetation
REFERENCES
[1] H.Deng and David A. Clausi, ”Unsupervised Image segmentation using
Figure 3. a simple MRF model T with a new implementation scheme,” Pattern
Recognition, vol. 37, pp.2323-2335, 2004.
Topographic sheet of the study area
[2] R.M.Haralick, ”Statistical and structural approaches to texture,” IEEE
Proc. , vol.67,no.5,pp.786-804, May 1979.
Fig. 2 shows the raw SAR image of the study area taken as [3] A.K.Jain and F.Farrokhnia, ”Unsupervised texture segmentation using
input. Fig. 3 shows the topographic sheet of the same area from Gabor filters,” Pattern Recognition,vol.24,no.12, pp.1167-1186, 1991.
which ground truth points representing water, urban and [4] T. Chang and C. C.Jay Kuo, “Texture analysis and classification with
vegetation areas are taken for reference. Raw SAR image is tree structured wavelet transform,” IEEE Trans. Image Processing, vol.
georeferenced and speckle suppressed. Then, classification 2, no.4, pp. 429-441, Oct 1993.
methodology explained in section II is applied and the Fig. 4 [5] C. M. Pun and M. C. Lee, “Log-polar wavelet energy signatures for
shows the segmented image with water, urban and vegetation rotation and scale invariant texture classification,” IEEE Trans. Pattern
areas. Anal. Mach. Intell., vol.21, no. 4, pp. 291-310, Apr 1999.
[6] T. Randen and J.H.Husey, “Filtering for texture classification: A
Water comparative study,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 21, no.
4, pp. 291-310, Apr, 1999.
Vegetation
[7] J.R.Carr and F.P.Miranda, “The semivariogram in comparison to the co-
occurrence matrix for classification of image texture,” IEEE Trans.
Geosci. Remote Sens., vol. 36, no.6, pp. 1945-1952, Nov. 1998.
[8] A.Niedermeier, E.Romaneesen, and S.Lehner, ”Detection of coastline
Urban
SAR images using wavelet methods,” IEEE Trans. Geosci. Remote
Sensing, vol. 38, pp. 2270-2281, Sept.2000.
[9] H. Derin and H..Elliott, “Modeling and segmentation of noisy and
textured images using Gibbs random fields,” IEEE Trans. Pattern Anal.
Mach. Intell., vol.9, no. 1, pp.39-55,1987.
[10] C.S.Won and H.Derin, “Unsupervised segmentation of noisy and
Figure 4. textured images using Markov Random fields,” CVGIP: Graph. Models
Image Process. Vol.54, no.4, pp. 308-328, 1992.
Segmented SAR Image with Water, urban and Vegetation [11] C.S.Won, ”A block based MAP segmentation for Image compressions,”
IEEE Trans. Circuits and Systems for Video Technology, vol.8,
areas. no.5,Sept. 1998.
Table I shows the confusion matrix generated for the [12] J.S.Lee,”Digital image enhancement and noise filtering by use of local
classified image by comparing with ground truth points from statistics,” IEEE Trans. Pattern Anal. Machine Intell. Vol.42,
no.7,pp.165-168, 1980.
topographic sheet. It gives an overall accuracy of 95.3971%.
Table II lists the commission and omission error. An error of
commission is a measure of the ability to discriminate within a
class and occurs when the classifier incorrectly commits pixels
of the class being sought to other classes. In this example, the
commission error for water stems from improperly calling
other classes water, so that three pixels labeled as water are
really a composite of other classes. An error of omission
1-4244-1212-9/07/$25.00 ©2007 IEEE. 550
Authorized licensed use limited to: BANARAS HINDU UNIVERSITY. Downloaded on October 18, 2008 at 02:39 from IEEE Xplore. Restrictions apply.
Anda mungkin juga menyukai
- Dual-Tree Complex Wavelet Transform Based SAR Despeckling Using Interscale DependenceDokumen9 halamanDual-Tree Complex Wavelet Transform Based SAR Despeckling Using Interscale DependenceNavdeep GoelBelum ada peringkat
- Remote FusionDokumen16 halamanRemote FusionakhilchibberBelum ada peringkat
- Multivariate Image Segmentation Using Semantic Region Growing with Adaptive Edge PenaltyDokumen4 halamanMultivariate Image Segmentation Using Semantic Region Growing with Adaptive Edge PenaltySanjay ShelarBelum ada peringkat
- A Fuzzy Graph-Based Segmentation For Marine and Maritime Applications in SAR ImagesDokumen4 halamanA Fuzzy Graph-Based Segmentation For Marine and Maritime Applications in SAR ImagesMiqueias AmorimBelum ada peringkat
- A Content Based Region Separation and Analysis Approach For Sar Image ClassificationDokumen7 halamanA Content Based Region Separation and Analysis Approach For Sar Image Classificationrahul sharmaBelum ada peringkat
- Lineament Extraction From Southern Chitradurga Schist Belt Using Landsat TM, ASTERGDEM and Geomatics TechniquesDokumen10 halamanLineament Extraction From Southern Chitradurga Schist Belt Using Landsat TM, ASTERGDEM and Geomatics TechniquescimasukBelum ada peringkat
- 重要-2008-Fabrizio Lombardini-3-D - SAR - Tomography - The - Multibaseline - Sector - Interpolation - ApproachDokumen5 halaman重要-2008-Fabrizio Lombardini-3-D - SAR - Tomography - The - Multibaseline - Sector - Interpolation - Approachchadavid1120Belum ada peringkat
- Sar Tomography: An Advanced Tool For 4D Spaceborne Radar Scanning With Application To Imaging and Monitoring of Cities and Single BuildingsDokumen9 halamanSar Tomography: An Advanced Tool For 4D Spaceborne Radar Scanning With Application To Imaging and Monitoring of Cities and Single BuildingsfakeBelum ada peringkat
- Analysis and Classification of SAR Textures Using Information TheoryDokumen13 halamanAnalysis and Classification of SAR Textures Using Information TheoryRodrigo VasconcelosBelum ada peringkat
- Automatic Edgedetection SARimagesDokumen14 halamanAutomatic Edgedetection SARimagesManasi NaikBelum ada peringkat
- Vegetation Identification by Using Particle Swarm OptimizationDokumen9 halamanVegetation Identification by Using Particle Swarm Optimizationpurushothaman sinivasanBelum ada peringkat
- Texture Feature Extraction For Classification of RDokumen7 halamanTexture Feature Extraction For Classification of RFantanesh TegegnBelum ada peringkat
- Image Classification Using Wavelet Based Features For Image Retrieval ApplicationsDokumen6 halamanImage Classification Using Wavelet Based Features For Image Retrieval ApplicationsVamsi KrishnaBelum ada peringkat
- 2D-3D Feature Extraction & Registration of Real World ScenesDokumen6 halaman2D-3D Feature Extraction & Registration of Real World ScenesZULKEFLE ISMAILBelum ada peringkat
- Radar Imaging of Urban Areas by Means of Very High-Resolution SAR and Interferometric SARDokumen12 halamanRadar Imaging of Urban Areas by Means of Very High-Resolution SAR and Interferometric SARsanuroybhsBelum ada peringkat
- Hyperspectral Image Classification Based On Spectral-Spatial Features Using Probabilistic SVM and Locally Weighted Markov Random FieldsDokumen6 halamanHyperspectral Image Classification Based On Spectral-Spatial Features Using Probabilistic SVM and Locally Weighted Markov Random FieldsSumit ChakravartyBelum ada peringkat
- Junqing Chen, Thrasyvoulos N. Pappas Aleksandra Mojsilovic, Bernice E. RogowitzDokumen4 halamanJunqing Chen, Thrasyvoulos N. Pappas Aleksandra Mojsilovic, Bernice E. RogowitzanasunislaBelum ada peringkat
- Texture Feature Extraction For Classification of Remote Sensing Data Using Wavelet Decomposition: A Comparative StudyDokumen6 halamanTexture Feature Extraction For Classification of Remote Sensing Data Using Wavelet Decomposition: A Comparative Studydiankusuma123Belum ada peringkat
- 1 s2.0 S092427162030263X MainDokumen14 halaman1 s2.0 S092427162030263X MainAhmad Iqbal Maulana LubisBelum ada peringkat
- Semantic Mapping Using Object-Class Segmentation of RGB-D ImagesDokumen6 halamanSemantic Mapping Using Object-Class Segmentation of RGB-D ImagesDefa SaputraBelum ada peringkat
- Performance Evaluation of Watershed SegmentationDokumen5 halamanPerformance Evaluation of Watershed SegmentationbudiBelum ada peringkat
- Remote Sensing: Deep Learning For SAR Image DespecklingDokumen20 halamanRemote Sensing: Deep Learning For SAR Image DespecklingCan AtalayBelum ada peringkat
- 2011 - 09 - 09 Slope Stability Radars Compared PDFDokumen3 halaman2011 - 09 - 09 Slope Stability Radars Compared PDFGrange GeotechBelum ada peringkat
- Conditional Random Fields For Lidar Point Cloud cl1Dokumen7 halamanConditional Random Fields For Lidar Point Cloud cl1DUVAN CAMILO GOMEZ PALACIOSBelum ada peringkat
- Cao Zong JieDokumen45 halamanCao Zong JieMikhail LavrentyevBelum ada peringkat
- A Study On Optimal D-Insar Filtering Technique According To Landform ReliefDokumen10 halamanA Study On Optimal D-Insar Filtering Technique According To Landform ReliefFila MerahBelum ada peringkat
- VPRS-based regional decision fusion increases classification accuracy of very fine resolution imagesDokumen15 halamanVPRS-based regional decision fusion increases classification accuracy of very fine resolution imagesWafa BenzaouiBelum ada peringkat
- Teknik Elektro Pengenalan PolaDokumen13 halamanTeknik Elektro Pengenalan PolaAxel RanggaBelum ada peringkat
- Texture Based Land Cover Classification AlgorithmDokumen7 halamanTexture Based Land Cover Classification AlgorithmAjan SenshilBelum ada peringkat
- Radargrammetry and Sar InterferommetryDokumen6 halamanRadargrammetry and Sar InterferommetryvrixscribdBelum ada peringkat
- Analysis of Image Quality Using LANDSAT 7Dokumen9 halamanAnalysis of Image Quality Using LANDSAT 7sinchana G SBelum ada peringkat
- Object vs pixel classification of SAR imagesDokumen13 halamanObject vs pixel classification of SAR imagesnurul maulidiahBelum ada peringkat
- Moysey, Knight and Jol (2006) (Interpretasi Berdasarkan TeksturDokumen8 halamanMoysey, Knight and Jol (2006) (Interpretasi Berdasarkan TeksturHadis Hasyimi Miftahul UlumBelum ada peringkat
- Spatial Acoustic Projection For 3D Imaging Sonar ReconstructionDokumen7 halamanSpatial Acoustic Projection For 3D Imaging Sonar Reconstruction张啊康Belum ada peringkat
- Aperture Radar (SAR) Systems Carried On A Variety of Airborne and SpaceborneDokumen9 halamanAperture Radar (SAR) Systems Carried On A Variety of Airborne and SpaceborneBăh ŢăraneeBelum ada peringkat
- Jurnal 1 - Kelompok 5Dokumen8 halamanJurnal 1 - Kelompok 5Calvin 76Belum ada peringkat
- A Denoising Algorithm For InSAR Surface Deformation AppilcationDokumen5 halamanA Denoising Algorithm For InSAR Surface Deformation AppilcationSp LeeBelum ada peringkat
- Synergistic Object-Based Multi-Class Feature Extraction in Urban Landscape Using Airborne Lidar DataDokumen14 halamanSynergistic Object-Based Multi-Class Feature Extraction in Urban Landscape Using Airborne Lidar Datasemonti mukherjeeBelum ada peringkat
- Remote SensingDokumen18 halamanRemote SensingSARAH SEJARIBelum ada peringkat
- R.A. Kozhemiakin, S.S. Krivenko, V.V. Lukin, R.C.P. Marques, F.N.S. de Medeiros, B. VozelDokumen10 halamanR.A. Kozhemiakin, S.S. Krivenko, V.V. Lukin, R.C.P. Marques, F.N.S. de Medeiros, B. VozelnicolasBelum ada peringkat
- Image SegmentationDokumen5 halamanImage SegmentationSingh InderBelum ada peringkat
- Pattern Detection in Airborne Lidar Data Using Laplacian of Gaussian FilterDokumen6 halamanPattern Detection in Airborne Lidar Data Using Laplacian of Gaussian FilterAlex VrankenBelum ada peringkat
- Synthetic Aperture Radar Image Processing Using The Supervised Textural-Neural Network Classification AlgorithmDokumen4 halamanSynthetic Aperture Radar Image Processing Using The Supervised Textural-Neural Network Classification Algorithmpradeep BBelum ada peringkat
- Synthetic Aperture Radar - Image FormationDokumen36 halamanSynthetic Aperture Radar - Image FormationMaamar Abo100% (1)
- Bistatic Radar Imaging System For Sea Surface Target DetectionDokumen6 halamanBistatic Radar Imaging System For Sea Surface Target DetectionNelson CruzBelum ada peringkat
- Cellular Neural Network For Automated deDokumen10 halamanCellular Neural Network For Automated dealphaBelum ada peringkat
- Edge Detection Techniques for Image SegmentationDokumen5 halamanEdge Detection Techniques for Image SegmentationArivazhagan ArtBelum ada peringkat
- AndersDokumen5 halamanAnderspaulinhaninfaBelum ada peringkat
- Digital Elevation Model: Modifikasi Digital Elevation Mode (DEM) (Haris S. D. Et Al.)Dokumen10 halamanDigital Elevation Model: Modifikasi Digital Elevation Mode (DEM) (Haris S. D. Et Al.)'hiLman' IcHigoBelum ada peringkat
- Deep Feature Learning and Classification of Remote Sensing ImagesDokumen19 halamanDeep Feature Learning and Classification of Remote Sensing ImagesUMT Artificial Intelligence Review (UMT-AIR)Belum ada peringkat
- Yitayew 2017Dokumen12 halamanYitayew 2017El BrainBelum ada peringkat
- Multiple Synthetic Aperture Design Concept For Geoscience ApplicationsDokumen7 halamanMultiple Synthetic Aperture Design Concept For Geoscience ApplicationsFORCHENXYZBelum ada peringkat
- Paper 030Dokumen6 halamanPaper 030Rupesh KumarBelum ada peringkat
- Interval - Edge - Estimation - in - SAR - ImagesDokumen18 halamanInterval - Edge - Estimation - in - SAR - ImagesEdwin Giovanny Giron AmayaBelum ada peringkat
- A Site-Specific Model of Radar Terrain Backscatter and ShadowingDokumen16 halamanA Site-Specific Model of Radar Terrain Backscatter and ShadowingTiagoBelum ada peringkat
- 1001 A Self-Supervised Near-to-Far Approach For Terrain-Adaptive Off-Road Autonomous DrivingDokumen7 halaman1001 A Self-Supervised Near-to-Far Approach For Terrain-Adaptive Off-Road Autonomous Driving1795546027Belum ada peringkat
- Isprs Archives XLI B8 1061 2016Dokumen6 halamanIsprs Archives XLI B8 1061 2016Konthoujam JamesBelum ada peringkat
- Insar Dem Why It Is Better?Dokumen8 halamanInsar Dem Why It Is Better?Percy PeraltaBelum ada peringkat
- Biao Hou, Yuheng Jiang, Bo Ren, Zaidao Wen, Shuang Wang, and Licheng JiaoDokumen4 halamanBiao Hou, Yuheng Jiang, Bo Ren, Zaidao Wen, Shuang Wang, and Licheng JiaoSiva SreeramdasBelum ada peringkat
- PyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1Dari EverandPyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1Belum ada peringkat
- Fundamental of Seismic MethodDokumen27 halamanFundamental of Seismic Methodradheshyamyadav100% (1)
- Fundamental of REMOTE SENSINGDokumen39 halamanFundamental of REMOTE SENSINGradheshyamyadavBelum ada peringkat
- Fundamenlat GeomagmetismDokumen31 halamanFundamenlat GeomagmetismradheshyamyadavBelum ada peringkat
- Theory of The Earth - D. AndersonDokumen379 halamanTheory of The Earth - D. Andersonradheshyamyadav100% (2)
- 0-7803-7031-1/01/$17.00 (C) 2001 Ieee 2856 0-7803-7031-1/01/$17.00 (C) 2001 Ieee 1-2939 0-7803-7031-1/01/$17.00 (C) 2001 Ieee 2856Dokumen3 halaman0-7803-7031-1/01/$17.00 (C) 2001 Ieee 2856 0-7803-7031-1/01/$17.00 (C) 2001 Ieee 1-2939 0-7803-7031-1/01/$17.00 (C) 2001 Ieee 2856radheshyamyadav100% (2)
- 2 Seismic Data Processing: 2.1 ObjectivesDokumen40 halaman2 Seismic Data Processing: 2.1 Objectivesradheshyamyadav100% (1)
- 6th Central Pay Commission Salary CalculatorDokumen15 halaman6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- HFFDokumen5 halamanHFFradheshyamyadavBelum ada peringkat
- 0-7803-7031-1/01/$17.00 (C) 2001 Ieee 2856 0-7803-7031-1/01/$17.00 (C) 2001 Ieee 1-2939 0-7803-7031-1/01/$17.00 (C) 2001 Ieee 2856Dokumen3 halaman0-7803-7031-1/01/$17.00 (C) 2001 Ieee 2856 0-7803-7031-1/01/$17.00 (C) 2001 Ieee 1-2939 0-7803-7031-1/01/$17.00 (C) 2001 Ieee 2856radheshyamyadav100% (2)
- Unsupervised Classification of Multifrequency and Fully Polarimetric SAR Images Based On The H/A/Alpha-Wishart ClassifierDokumen11 halamanUnsupervised Classification of Multifrequency and Fully Polarimetric SAR Images Based On The H/A/Alpha-Wishart ClassifierradheshyamyadavBelum ada peringkat
- Final Report in OILDokumen97 halamanFinal Report in OILumesh kumar yadav90% (10)
- ICU Lines TubesDokumen7 halamanICU Lines TubesCindy MurphyBelum ada peringkat
- Best Safety Practices in The Philippine Construction PDFDokumen16 halamanBest Safety Practices in The Philippine Construction PDFDione Klarisse GuevaraBelum ada peringkat
- Misbehaviour - Nges Rgyur - I PDFDokumen32 halamanMisbehaviour - Nges Rgyur - I PDFozergyalmoBelum ada peringkat
- Unitrain I Overview enDokumen1 halamanUnitrain I Overview enDragoi MihaiBelum ada peringkat
- Current Events Guide for LET TakersDokumen7 halamanCurrent Events Guide for LET TakersGlyzel TolentinoBelum ada peringkat
- Infinitive Clauses PDFDokumen3 halamanInfinitive Clauses PDFKatia LeliakhBelum ada peringkat
- Characteristics and Elements of A Business Letter Characteristics of A Business LetterDokumen3 halamanCharacteristics and Elements of A Business Letter Characteristics of A Business LetterPamela Galang100% (1)
- Thecodeblocks Com Acl in Nodejs ExplainedDokumen1 halamanThecodeblocks Com Acl in Nodejs ExplainedHamza JaveedBelum ada peringkat
- Teacher swap agreement for family reasonsDokumen4 halamanTeacher swap agreement for family reasonsKimber LeeBelum ada peringkat
- Annexure 2 Form 72 (Scope) Annexure IDokumen4 halamanAnnexure 2 Form 72 (Scope) Annexure IVaghasiyaBipinBelum ada peringkat
- iPhone Repair FormDokumen1 halamaniPhone Repair Formkabainc0% (1)
- Schematic Electric System Cat D8T Vol1Dokumen33 halamanSchematic Electric System Cat D8T Vol1Andaru Gunawan100% (1)
- Perilaku Ramah Lingkungan Peserta Didik Sma Di Kota BandungDokumen11 halamanPerilaku Ramah Lingkungan Peserta Didik Sma Di Kota Bandungnurulhafizhah01Belum ada peringkat
- XSI Public Indices Ocean Freight - January 2021Dokumen7 halamanXSI Public Indices Ocean Freight - January 2021spyros_peiraiasBelum ada peringkat
- Week 5 WHLP Nov. 2 6 2020 DISSDokumen5 halamanWeek 5 WHLP Nov. 2 6 2020 DISSDaniel BandibasBelum ada peringkat
- Investigation of Cyber CrimesDokumen9 halamanInvestigation of Cyber CrimesHitesh BansalBelum ada peringkat
- Once in his Orient: Le Corbusier and the intoxication of colourDokumen4 halamanOnce in his Orient: Le Corbusier and the intoxication of coloursurajBelum ada peringkat
- Diaz, Rony V. - at War's End An ElegyDokumen6 halamanDiaz, Rony V. - at War's End An ElegyIan Rosales CasocotBelum ada peringkat
- Latest Ku ReportDokumen29 halamanLatest Ku Reportsujeet.jha.311Belum ada peringkat
- Cignal Channel 490Dokumen2 halamanCignal Channel 490Arild JuliusBelum ada peringkat
- List/Status of 655 Projects Upto 5.00 MW Capacity As On TodayDokumen45 halamanList/Status of 655 Projects Upto 5.00 MW Capacity As On Todayganvaqqqzz21Belum ada peringkat
- ESG Module 2 1 32Dokumen33 halamanESG Module 2 1 32salamat lang akinBelum ada peringkat
- Comparing and contrasting inductive learning and concept attainment strategiesDokumen3 halamanComparing and contrasting inductive learning and concept attainment strategiesKeira DesameroBelum ada peringkat
- Dhikr or Zikr or Remembrance of AllahDokumen27 halamanDhikr or Zikr or Remembrance of AllahMd. Naim KhanBelum ada peringkat
- LS1 Eng. Modules With Worksheets (Figure of Speech)Dokumen14 halamanLS1 Eng. Modules With Worksheets (Figure of Speech)Bong CardonaBelum ada peringkat
- v6c. Story of CarbonDokumen12 halamanv6c. Story of CarbonJahangir AliBelum ada peringkat
- Healthy Kitchen Shortcuts: Printable PackDokumen12 halamanHealthy Kitchen Shortcuts: Printable PackAndre3893Belum ada peringkat
- dlp4 Math7q3Dokumen3 halamandlp4 Math7q3Therence UbasBelum ada peringkat
- Successfull Weight Loss: Beginner'S Guide ToDokumen12 halamanSuccessfull Weight Loss: Beginner'S Guide ToDenise V. FongBelum ada peringkat