Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- JUKI ddl-5550 Instruction - 5KDokumen48 halamanJUKI ddl-5550 Instruction - 5KhsongunBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Mounting Virtual Box Machine Images On A HostDokumen1 halamanMounting Virtual Box Machine Images On A HosthsongunBelum ada peringkat
- Gravity and Magnetic Data - HALDokumen6 halamanGravity and Magnetic Data - HALhsongunBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- 0943Dokumen12 halaman0943Ankit SinghBelum ada peringkat
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Digital Detection and Feedback Fluxgate MagnetometerDokumen7 halamanDigital Detection and Feedback Fluxgate MagnetometerhsongunBelum ada peringkat
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Using The Siemens S65 - DisplayDokumen9 halamanUsing The Siemens S65 - DisplayhsongunBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- SCRManDokumen43 halamanSCRManhsongunBelum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Fet RF Amplifier Design TechniquesDokumen5 halamanFet RF Amplifier Design TechniqueshsongunBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- FGM DSDokumen7 halamanFGM DShsongunBelum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Design of Staircase by Limit State Method UNIT-5: C.risers Minus OneDokumen5 halamanDesign of Staircase by Limit State Method UNIT-5: C.risers Minus OneVAIJAYANTHI PBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- SFTP Certificate Handling in BISDokumen18 halamanSFTP Certificate Handling in BISkemoT1990TM100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Heidegger Midterm DissDokumen72 halamanHeidegger Midterm Dissrhoda mae a. paquinolBelum ada peringkat
- HTTP StreamsDokumen8 halamanHTTP StreamsMarcelo Castro MartinoBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- (Casas & Sarmiento, 2015) GIS-Aided Suitability Assessment of Mt. Mayapay Watershed in Butuan City, Agusan Del NorteDokumen15 halaman(Casas & Sarmiento, 2015) GIS-Aided Suitability Assessment of Mt. Mayapay Watershed in Butuan City, Agusan Del NorteSheila Grace BelanBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Microsoft SQL DatabaseDokumen401 halamanMicrosoft SQL Databasemtamilmani50% (2)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Passport Appointment PDFDokumen5 halamanPassport Appointment PDFRitu AgarwalBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- About Procurement ConsultingDokumen3 halamanAbout Procurement ConsultingBiswadeep SarkarBelum ada peringkat
- Frequency Analysis Vibration Spectrum Analysis Steve GoldmanDokumen9 halamanFrequency Analysis Vibration Spectrum Analysis Steve GoldmantylerdurdaneBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Electronic Let Off MotionDokumen3 halamanElectronic Let Off MotionWaqar Baloch100% (2)
- Ic 1403 2 MarksDokumen14 halamanIc 1403 2 MarksJeya Prakash100% (2)
- BTD-Final Lesson PlanDokumen22 halamanBTD-Final Lesson PlanSunil BajantriBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Wavin QuickStream Specification Oct 14Dokumen6 halamanWavin QuickStream Specification Oct 14Syahrisal SaputraBelum ada peringkat
- Installation & Stock Detail of Ignition Modules & Magnetos of Gas Compressor Units (All Fields)Dokumen4 halamanInstallation & Stock Detail of Ignition Modules & Magnetos of Gas Compressor Units (All Fields)Atiq_2909Belum ada peringkat
- Transport ModellingDokumen37 halamanTransport ModellingRiza Atiq Abdullah Rahmat100% (6)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Datasheet Fuji F5018 F5020Dokumen6 halamanDatasheet Fuji F5018 F5020StaryzgredBelum ada peringkat
- Mach Oil BrochureDokumen44 halamanMach Oil BrochureIntan DavidBelum ada peringkat
- Practice Exam 2Dokumen22 halamanPractice Exam 2Sealtiel1020100% (1)
- Artificial LightingDokumen7 halamanArtificial Lightingkookie maeBelum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (120)
- NTS - Math Notes & Mcqs Solved Grade 8thDokumen10 halamanNTS - Math Notes & Mcqs Solved Grade 8thZahid KumailBelum ada peringkat
- Dometic RM4185 6405 PDFDokumen20 halamanDometic RM4185 6405 PDFcarlosrei2Belum ada peringkat
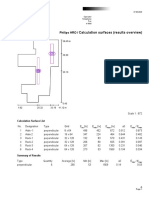
- Calculation Surfaces (Results Overview) : Philips HRODokumen4 halamanCalculation Surfaces (Results Overview) : Philips HROsanaBelum ada peringkat
- 4x16 RM NyyfDokumen1 halaman4x16 RM NyyfjamilBelum ada peringkat
- 2SK3377Dokumen5 halaman2SK3377Jheremy Sebastian TorresBelum ada peringkat
- SAP ABAP ResumeDokumen3 halamanSAP ABAP Resumeshakti1392821Belum ada peringkat
- Links Deep WebDokumen2 halamanLinks Deep WebArnoldTorresBelum ada peringkat
- ASTM Pumping TestDokumen125 halamanASTM Pumping TestErnesto Heinze100% (1)
- CPDS Notes Final Unit 1 PDFDokumen25 halamanCPDS Notes Final Unit 1 PDFSai TejaBelum ada peringkat
- Software: Measurlink Is An Easy-To-Use, Windows-Based Family of Quality Data Management Software ApplicationsDokumen8 halamanSoftware: Measurlink Is An Easy-To-Use, Windows-Based Family of Quality Data Management Software ApplicationsBrandi DaleBelum ada peringkat
- Information Security Chapter 2 Planning For SecurityDokumen20 halamanInformation Security Chapter 2 Planning For SecurityBramara Sri100% (1)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)