Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
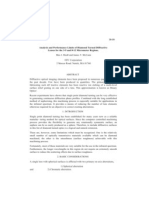
- Wang Invited Proc.7195 PhotonicsWest09 Vytran 2009Dokumen11 halamanWang Invited Proc.7195 PhotonicsWest09 Vytran 2009kndprasad01Belum ada peringkat
- Testing of Curved Surfaces and or LensesDokumen45 halamanTesting of Curved Surfaces and or Lenseskndprasad01Belum ada peringkat
- Asphere Fabrication Goes Commercial-Part III-Machines On The MarketDokumen2 halamanAsphere Fabrication Goes Commercial-Part III-Machines On The Marketkndprasad01Belum ada peringkat
- Fabrication of Freeform OpticsDokumen3 halamanFabrication of Freeform Opticskndprasad01100% (1)
- PensilvaniaDokumen2 halamanPensilvaniakndprasad01Belum ada peringkat
- DOE AnalysisDokumen11 halamanDOE Analysiskndprasad01Belum ada peringkat
- Scanning Pentaprism Measurements of Off-Axis Aspherics - 2008Dokumen10 halamanScanning Pentaprism Measurements of Off-Axis Aspherics - 2008kndprasad01Belum ada peringkat
- Testing Aspherics Using Two-Wavelength HolographyDokumen6 halamanTesting Aspherics Using Two-Wavelength Holographykndprasad01Belum ada peringkat
- ASphericDokumen5 halamanASpherickndprasad01Belum ada peringkat
- Significance of GodboleDokumen5 halamanSignificance of GodbolehickeyvBelum ada peringkat
- DR PDFDokumen252 halamanDR PDFa_ouchar0% (1)
- SDHI18 - Komparativna Analiza Primene Vodostana I Sinhronih Regulatora TurbinaDokumen13 halamanSDHI18 - Komparativna Analiza Primene Vodostana I Sinhronih Regulatora TurbinaAleksandar PetkovicBelum ada peringkat
- Improve On-Time DeliveriesDokumen24 halamanImprove On-Time DeliveriesUdayBelum ada peringkat
- Biology Accel Syllabus 2011-2012Dokumen3 halamanBiology Accel Syllabus 2011-2012Mike DeleonBelum ada peringkat
- Shawal 1431 AH Prayer ScheduleDokumen2 halamanShawal 1431 AH Prayer SchedulemasjidibrahimBelum ada peringkat
- Semi Finals in Tle 2015Dokumen3 halamanSemi Finals in Tle 2015LoraineTenorioBelum ada peringkat
- 1762 Ob8 PDFDokumen16 halaman1762 Ob8 PDFRodríguez EdwardBelum ada peringkat
- Middle Range Theory Ellen D. Schulzt: Modeling and Role Modeling Katharine Kolcaba: Comfort TheoryDokumen22 halamanMiddle Range Theory Ellen D. Schulzt: Modeling and Role Modeling Katharine Kolcaba: Comfort TheoryMerlinBelum ada peringkat
- Paediatric Intake Form Modern OT 2018Dokumen6 halamanPaediatric Intake Form Modern OT 2018SefBelum ada peringkat
- Table Equivalent Schedule 40 Steel PipeDokumen1 halamanTable Equivalent Schedule 40 Steel PipeorisBelum ada peringkat
- Assignment 2 Unit 20 Fully Completed - ReviewedDokumen5 halamanAssignment 2 Unit 20 Fully Completed - Reviewedchris.orisawayiBelum ada peringkat
- 300 PSI CTS (MP-1115) Operation Manual Rev1.3Dokumen18 halaman300 PSI CTS (MP-1115) Operation Manual Rev1.3Juan Manuel VizosoBelum ada peringkat
- Mahindra & MahindraDokumen13 halamanMahindra & MahindraAbhishek DharmadhikariBelum ada peringkat
- Math COT 3Dokumen18 halamanMath COT 3Icy Mae SenadosBelum ada peringkat
- Week 1 - NATURE AND SCOPE OF ETHICSDokumen12 halamanWeek 1 - NATURE AND SCOPE OF ETHICSRegielyn CapitaniaBelum ada peringkat
- Faa Registry: N-Number Inquiry ResultsDokumen3 halamanFaa Registry: N-Number Inquiry Resultsolga duqueBelum ada peringkat
- Cynosure Starlux 500 Palomar Technical Service ManualDokumen47 halamanCynosure Starlux 500 Palomar Technical Service ManualJF SilvaBelum ada peringkat
- NAT-REVIEWER-IN-PHYSICAL EDUCATIONDokumen4 halamanNAT-REVIEWER-IN-PHYSICAL EDUCATIONMira Rochenie CuranBelum ada peringkat
- Circle The Best Answer A, B, C, D or EDokumen4 halamanCircle The Best Answer A, B, C, D or Ewilder jackBelum ada peringkat
- 3rd Quarter Exam (Statistics)Dokumen4 halaman3rd Quarter Exam (Statistics)JERALD MONJUANBelum ada peringkat
- Sales 20: Years Advertising Expense (Millions) X Sales (Thousands) yDokumen8 halamanSales 20: Years Advertising Expense (Millions) X Sales (Thousands) ybangBelum ada peringkat
- Assessment Questions: 1: Wash - Rinse and SanitizeDokumen3 halamanAssessment Questions: 1: Wash - Rinse and SanitizeAna Margarita AycochoBelum ada peringkat
- Poly 103Dokumen20 halamanPoly 103Sharifah Zulaikha BenYahyaBelum ada peringkat
- OurCatholicFaith PowerPoint Chapter1Dokumen21 halamanOurCatholicFaith PowerPoint Chapter1VinBelum ada peringkat
- Passenger Lift Alert - Health and Safety AuthorityDokumen4 halamanPassenger Lift Alert - Health and Safety AuthorityReginald MaswanganyiBelum ada peringkat
- DISPOSABLE GLOVES CATALOG 2023npDokumen4 halamanDISPOSABLE GLOVES CATALOG 2023npTeodylee CruzBelum ada peringkat
- Curing Obesity, WorldwideDokumen6 halamanCuring Obesity, WorldwideHernán SanabriaBelum ada peringkat
- SambongDokumen3 halamanSambongNica Del GallegoBelum ada peringkat
- Fyp-Hydraulic Brakes CompleteDokumen32 halamanFyp-Hydraulic Brakes CompleteRishabh JainBelum ada peringkat