Anda mungkin juga menyukai
- Rethinking The Pivot Point: DR Seong-Gi SeoDokumen4 halamanRethinking The Pivot Point: DR Seong-Gi SeoTrinh Xuan TungBelum ada peringkat
- The Pivot Point: Chapter OneDokumen5 halamanThe Pivot Point: Chapter OneSatya Prakash BhardwajBelum ada peringkat
- Cauvier Understanding The Pivot PointDokumen0 halamanCauvier Understanding The Pivot PointJonathan RossBelum ada peringkat
- Guia de Naval II 2011 MARZO JULIO 2011 ORIGINAL 16 DE ABRILDokumen94 halamanGuia de Naval II 2011 MARZO JULIO 2011 ORIGINAL 16 DE ABRILGermán Cristian Camacho SilvaBelum ada peringkat
- Rudders: Semi Balanced RudderDokumen10 halamanRudders: Semi Balanced RudderAurvin SinghBelum ada peringkat
- Shallow Water PDCDokumen15 halamanShallow Water PDCsunusukuBelum ada peringkat
- Adobe Scan 03 Mei 2023Dokumen1 halamanAdobe Scan 03 Mei 2023Deli MejunBelum ada peringkat
- VIRTUE BPG Integrated Final PDFDokumen233 halamanVIRTUE BPG Integrated Final PDFsplicosakiBelum ada peringkat
- Notes On Anchoring - EdwinDokumen6 halamanNotes On Anchoring - EdwinEnrique BarajasBelum ada peringkat
- Mooring Snspool Version 1Dokumen9 halamanMooring Snspool Version 1Alonso Olaya RuizBelum ada peringkat
- Manoeuvring 2nd Grade Handout Blocki PDFDokumen27 halamanManoeuvring 2nd Grade Handout Blocki PDFIuri DudinovBelum ada peringkat
- Resolution MSC.137Dokumen6 halamanResolution MSC.137Alexandre Gonçalves da RochaBelum ada peringkat
- Anchoring CiiDokumen13 halamanAnchoring CiiDelando CoriahBelum ada peringkat
- TTM 2000 RezeoDokumen403 halamanTTM 2000 RezeoFlo FloBelum ada peringkat
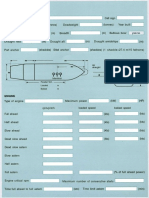
- Pilot Card Tank09L: Ship'S ParticularsDokumen2 halamanPilot Card Tank09L: Ship'S ParticularsAngga PurwantoBelum ada peringkat
- Winter Navigation ST - Lawrence 2011Dokumen61 halamanWinter Navigation ST - Lawrence 2011moe_htwe_1Belum ada peringkat
- Seam 213Dokumen8 halamanSeam 213John Gonzaga EscuadroBelum ada peringkat
- Trials and MonitoringDokumen49 halamanTrials and MonitoringFabio TemporiniBelum ada peringkat
- Student Centred ActivityDokumen3 halamanStudent Centred ActivityakmalBelum ada peringkat
- Philsin College: Midterm ExamDokumen45 halamanPhilsin College: Midterm ExamDarrel DilaoBelum ada peringkat
- MSC 137 PDFDokumen8 halamanMSC 137 PDFSandipan DBelum ada peringkat
- 60ae10b3e6e68249dd22d333 2021-04-01 BST SS V14Dokumen206 halaman60ae10b3e6e68249dd22d333 2021-04-01 BST SS V14Made HartawanBelum ada peringkat
- Turning in CirclesDokumen31 halamanTurning in CirclesBala Murugan100% (1)
- Unit 4 Anchor and Cable WorkDokumen5 halamanUnit 4 Anchor and Cable WorkRazvan RaduBelum ada peringkat
- Mooring (Watercraft) : Not To Be Confused WithDokumen19 halamanMooring (Watercraft) : Not To Be Confused WithDODDI PRASADBelum ada peringkat
- Bow ThrusterDokumen6 halamanBow ThrusterAurelio DutariBelum ada peringkat
- Ship HandlingDokumen76 halamanShip HandlingYounes GhorbanzadehBelum ada peringkat
- Pilot Card 1Dokumen1 halamanPilot Card 1TalyibIbrahimBelum ada peringkat
- Presentation AnchorDokumen35 halamanPresentation AnchorHan Thu WynnBelum ada peringkat
- Forces On Ship: OE 1010 Introduction To Ocean EngineeringDokumen62 halamanForces On Ship: OE 1010 Introduction To Ocean EngineeringdhruvbhagtaniBelum ada peringkat
- Risk Focus5 PDFDokumen56 halamanRisk Focus5 PDFferkmBelum ada peringkat
- Cicloidal Propulsion and Control For Ship Handling TugsDokumen18 halamanCicloidal Propulsion and Control For Ship Handling TugsMerrel RossBelum ada peringkat
- 01 Anchoring MabelDokumen80 halaman01 Anchoring MabelwayanBelum ada peringkat
- nav 04 - pilot card - копияDokumen4 halamannav 04 - pilot card - копияКонстантин КулаковBelum ada peringkat
- Tow LinesDokumen11 halamanTow Linesbill baileyBelum ada peringkat
- When Ship Encounters Rough WeatherDokumen4 halamanWhen Ship Encounters Rough WeatherGAMMA FACULTYBelum ada peringkat
- Nav 04 - Pilot CardDokumen4 halamanNav 04 - Pilot CardCORIN EDWARD100% (1)
- Imo Circ/resDokumen20 halamanImo Circ/rescarmenBelum ada peringkat
- 01-Types of Ship PropellersDokumen43 halaman01-Types of Ship PropellersAbdelrahman Atef ElbashBelum ada peringkat
- Technical Bulletin: Mooring PracticesDokumen3 halamanTechnical Bulletin: Mooring PracticeshoangductuanBelum ada peringkat
- MasterDokumen17 halamanMasterCelal Bozdogan100% (1)
- Passenger Ship in A Shipyard at Papenburg, Ger. © Meyer-Werft/Press and Information Office of TheDokumen69 halamanPassenger Ship in A Shipyard at Papenburg, Ger. © Meyer-Werft/Press and Information Office of TheVinoth KumarBelum ada peringkat
- Sea Trial GuidanceDokumen7 halamanSea Trial GuidanceStathis MoumousisBelum ada peringkat
- Rate of TurnDokumen22 halamanRate of Turnمرتضى جبار السودانيBelum ada peringkat
- Chapter 1Dokumen22 halamanChapter 1GustiRadhenIchwan100% (1)
- Hydrodynamics & InteractionDokumen33 halamanHydrodynamics & InteractionIoana Johanna Cristea100% (1)
- Maniobra de Remolque de BuquesDokumen520 halamanManiobra de Remolque de Buquesvampiredraak2712Belum ada peringkat
- The Ultimate Actionable Guide of Anchoring A Ship: Written by On February 13, 2016Dokumen19 halamanThe Ultimate Actionable Guide of Anchoring A Ship: Written by On February 13, 2016Panagiotis MouzenidisBelum ada peringkat
- 02 Propeller GeometryDokumen44 halaman02 Propeller GeometryAbdelrahman Atef ElbashBelum ada peringkat
- Types of RuddersDokumen33 halamanTypes of Ruddersmario enriquezBelum ada peringkat
- AnchoringDokumen24 halamanAnchoringAurelio DutariBelum ada peringkat
- CHIEF MATE PHASE 2 Anchoring 10.4 and 10.5Dokumen48 halamanCHIEF MATE PHASE 2 Anchoring 10.4 and 10.5Sudipta Kumar DeBelum ada peringkat
- Manoeuvrability Final EditedDokumen12 halamanManoeuvrability Final EditedSaptarshi BasuBelum ada peringkat
- Hydrodynamic Interaction & SQUAT PDFDokumen49 halamanHydrodynamic Interaction & SQUAT PDFMaxi100% (1)
- Use of Pivot Point in Ship Handling PDFDokumen10 halamanUse of Pivot Point in Ship Handling PDFTrinh Xuan TungBelum ada peringkat
- Pivot Point WebDokumen21 halamanPivot Point WebRobert RobertoBelum ada peringkat
- Understanding The Pivot PointDokumen20 halamanUnderstanding The Pivot PointVirgil Titimeaua100% (1)
- Pivot PointDokumen26 halamanPivot PointJet RocetBelum ada peringkat
- Safer and More Efficient Ship Handling With The PiDokumen9 halamanSafer and More Efficient Ship Handling With The PiTuan Dao QuangBelum ada peringkat
- Pivot PointDokumen31 halamanPivot PointJorge Quintas100% (2)
- General P&IcoverDokumen8 halamanGeneral P&IcoversanuBelum ada peringkat
- Aritime Air Emissions Marpol Annex Vi: Strategies and ConsequencesDokumen16 halamanAritime Air Emissions Marpol Annex Vi: Strategies and ConsequencesDan MillerBelum ada peringkat
- Introduction To Shiphandling: I. Forces II. Terminology III. Standard CommandsDokumen60 halamanIntroduction To Shiphandling: I. Forces II. Terminology III. Standard Commandssnhz555100% (1)
- TEST12Dokumen1 halamanTEST12sanuBelum ada peringkat
- Shipping TermsDokumen25 halamanShipping TermsAbdel Nasser Al-sheikh YousefBelum ada peringkat
- B1a Ship ConsDokumen7 halamanB1a Ship ConsAnonymous gfR3btyUBelum ada peringkat
- Wind DirectionDokumen1 halamanWind DirectionsanuBelum ada peringkat
- Wicc Dry 1 AutoDokumen2 halamanWicc Dry 1 AutoMuharrahmansyahBelum ada peringkat
- Procedure For Inspection, Testing and Acceptance of Wrought Steels (Other Than Plate, Sheet, Strip and Tube)Dokumen66 halamanProcedure For Inspection, Testing and Acceptance of Wrought Steels (Other Than Plate, Sheet, Strip and Tube)SugiharnoBelum ada peringkat
- Jet PropulsionDokumen37 halamanJet PropulsionmuruganBelum ada peringkat
- Study Materials PDFDokumen2 halamanStudy Materials PDFHimanshu GidwaniBelum ada peringkat
- EFFECT ON FMC DESCENT PATH AT 45% NL THRUST 22JAN90Dokumen5 halamanEFFECT ON FMC DESCENT PATH AT 45% NL THRUST 22JAN90vetsa737Belum ada peringkat
- Terex 33 05B Rock TruckDokumen2 halamanTerex 33 05B Rock TruckAmol JdvBelum ada peringkat
- Aluminium Alloy 7075Dokumen3 halamanAluminium Alloy 7075jcetmechanicalBelum ada peringkat
- AW139 Training Notes b2Dokumen1.958 halamanAW139 Training Notes b2pbubs94% (34)
- PultrsionDokumen18 halamanPultrsionHaren SinghBelum ada peringkat
- Dorcy Catalog 2012Dokumen36 halamanDorcy Catalog 2012xwolverinez2189Belum ada peringkat
- Hcf4051be - MuxDokumen15 halamanHcf4051be - MuxMatheus FonsecaBelum ada peringkat
- Design of Strip Foundation With Axial Loads For Proposed Housing Scheme, LVPS-Phase IIDokumen25 halamanDesign of Strip Foundation With Axial Loads For Proposed Housing Scheme, LVPS-Phase IIHenra HalimBelum ada peringkat
- Wind Load Calc BS 6399 2Dokumen6 halamanWind Load Calc BS 6399 2Kho C AhlBelum ada peringkat
- Assign6 2013Dokumen2 halamanAssign6 2013Ravi SharmaBelum ada peringkat
- FL 382Dokumen24 halamanFL 382Dany GunawanBelum ada peringkat
- Icao Doc 7192 An857 Part d3Dokumen116 halamanIcao Doc 7192 An857 Part d3Santiago HidalgoBelum ada peringkat
- 221 Report Altimeter GR 1Dokumen23 halaman221 Report Altimeter GR 1Gildo L. Destreza Jr.Belum ada peringkat
- Airfoil WarnabDokumen13 halamanAirfoil Warnabjacob ellyBelum ada peringkat
- Wheel Load Calculation For Gantry Crane: A. Design Loads 1 Self WeightDokumen1 halamanWheel Load Calculation For Gantry Crane: A. Design Loads 1 Self WeightBang OchimBelum ada peringkat
- Citation CJ4 Specification & DescriptionDokumen30 halamanCitation CJ4 Specification & DescriptionLas Ukcu100% (4)
- Design Purlin Girt FinalDokumen14 halamanDesign Purlin Girt FinalcadsultanBelum ada peringkat
- Aircraft WarningDokumen2 halamanAircraft WarningayominhasangaBelum ada peringkat
- Advancements On The Solar SystemDokumen7 halamanAdvancements On The Solar SystemJohn Kenneth Adorablè EnocBelum ada peringkat
- Challenger 601 Normals ChecklistDokumen3 halamanChallenger 601 Normals ChecklistFBelum ada peringkat
- Cooling of CPU Fan PDFDokumen10 halamanCooling of CPU Fan PDFLeonard LiangBelum ada peringkat
- Module 10 EASADokumen8 halamanModule 10 EASAAhmedBilal100% (1)
- Project Apollo, NASA Moon Landing Program - QuickSciTechDokumen9 halamanProject Apollo, NASA Moon Landing Program - QuickSciTechRoberto Perez BotellaBelum ada peringkat
- Pelton Wheel Turbines Operate Most Efficiently With A Larger Head and Lower FlowratesDokumen17 halamanPelton Wheel Turbines Operate Most Efficiently With A Larger Head and Lower FlowratesJayant SisodiaBelum ada peringkat
- AeroGo Air Cushion Vehicle BrochureDokumen10 halamanAeroGo Air Cushion Vehicle BrochureDrakkarBelum ada peringkat
- WASP Newsletter 06/01/68Dokumen16 halamanWASP Newsletter 06/01/68CAP History LibraryBelum ada peringkat
- Elevate and Dominate: 21 Ways to Win On and Off the FieldDari EverandElevate and Dominate: 21 Ways to Win On and Off the FieldPenilaian: 5 dari 5 bintang5/5 (7)
- Merle's Door: Lessons from a Freethinking DogDari EverandMerle's Door: Lessons from a Freethinking DogPenilaian: 4 dari 5 bintang4/5 (326)
- Becky Lynch: The Man: Not Your Average Average GirlDari EverandBecky Lynch: The Man: Not Your Average Average GirlPenilaian: 4.5 dari 5 bintang4.5/5 (15)
- Crazy for the Storm: A Memoir of SurvivalDari EverandCrazy for the Storm: A Memoir of SurvivalPenilaian: 3.5 dari 5 bintang3.5/5 (217)
- The Arm: Inside the Billion-Dollar Mystery of the Most Valuable Commodity in SportsDari EverandThe Arm: Inside the Billion-Dollar Mystery of the Most Valuable Commodity in SportsPenilaian: 4 dari 5 bintang4/5 (49)
- Welcome to the Goddamn Ice Cube: Chasing Fear and Finding Home in the Great White NorthDari EverandWelcome to the Goddamn Ice Cube: Chasing Fear and Finding Home in the Great White NorthPenilaian: 4 dari 5 bintang4/5 (59)
- Peak: The New Science of Athletic Performance That is Revolutionizing SportsDari EverandPeak: The New Science of Athletic Performance That is Revolutionizing SportsPenilaian: 5 dari 5 bintang5/5 (97)
- Life Is Not an Accident: A Memoir of ReinventionDari EverandLife Is Not an Accident: A Memoir of ReinventionPenilaian: 3.5 dari 5 bintang3.5/5 (7)
- Strong Is the New Beautiful: Embrace Your Natural Beauty, Eat Clean, and Harness Your PowerDari EverandStrong Is the New Beautiful: Embrace Your Natural Beauty, Eat Clean, and Harness Your PowerPenilaian: 4 dari 5 bintang4/5 (5)
- Badasses: The Legend of Snake, Foo, Dr. Death, and John Madden's Oakland RaidersDari EverandBadasses: The Legend of Snake, Foo, Dr. Death, and John Madden's Oakland RaidersPenilaian: 4 dari 5 bintang4/5 (15)
- What Winners Won't Tell You: Lessons from a Legendary DefenderDari EverandWhat Winners Won't Tell You: Lessons from a Legendary DefenderPenilaian: 4.5 dari 5 bintang4.5/5 (7)
- Bloodlines: The True Story of a Drug Cartel, the FBI, and the Battle for a Horse-Racing DynastyDari EverandBloodlines: The True Story of a Drug Cartel, the FBI, and the Battle for a Horse-Racing DynastyPenilaian: 4 dari 5 bintang4/5 (8)
- Survive!: Essential Skills and Tactics to Get You Out of Anywhere—AliveDari EverandSurvive!: Essential Skills and Tactics to Get You Out of Anywhere—AliveBelum ada peringkat
- Relentless: From Good to Great to UnstoppableDari EverandRelentless: From Good to Great to UnstoppablePenilaian: 5 dari 5 bintang5/5 (788)
- The Perfect Mile: Three Athletes, One Goal, and Less Than Four Minutes to Achieve ItDari EverandThe Perfect Mile: Three Athletes, One Goal, and Less Than Four Minutes to Achieve ItBelum ada peringkat
- Can't Nothing Bring Me Down: Chasing Myself in the Race Against TimeDari EverandCan't Nothing Bring Me Down: Chasing Myself in the Race Against TimePenilaian: 4 dari 5 bintang4/5 (1)
- Patriot Reign: Bill Belichick, the Coaches, and the Players Who Built a ChampionDari EverandPatriot Reign: Bill Belichick, the Coaches, and the Players Who Built a ChampionPenilaian: 3.5 dari 5 bintang3.5/5 (30)
- House of Nails: A Memoir of Life on the EdgeDari EverandHouse of Nails: A Memoir of Life on the EdgePenilaian: 3 dari 5 bintang3/5 (4)
- The Rise of Superman: Decoding the Science of Ultimate Human PerformanceDari EverandThe Rise of Superman: Decoding the Science of Ultimate Human PerformancePenilaian: 4.5 dari 5 bintang4.5/5 (194)
- The Last Dive: A Father and Son's Fatal Descent into the Ocean's DepthsDari EverandThe Last Dive: A Father and Son's Fatal Descent into the Ocean's DepthsBelum ada peringkat
- Earnhardt Nation: The Full-Throttle Saga of NASCAR's First FamilyDari EverandEarnhardt Nation: The Full-Throttle Saga of NASCAR's First FamilyPenilaian: 3.5 dari 5 bintang3.5/5 (7)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 5 dari 5 bintang5/5 (2651)
- Body Confidence: Venice Nutrition's 3 Step System That Unlocks Your Body's Full PotentialDari EverandBody Confidence: Venice Nutrition's 3 Step System That Unlocks Your Body's Full PotentialPenilaian: 4 dari 5 bintang4/5 (2)