Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Risk in Clean RoomDokumen9 halamanRisk in Clean RoomABEERBelum ada peringkat
- Daily Dawn Newspaper Vocabulary with Urdu MeaningsDokumen4 halamanDaily Dawn Newspaper Vocabulary with Urdu MeaningsBahawal Khan JamaliBelum ada peringkat
- Quicksort and Heapsort Algorithms ExplainedDokumen41 halamanQuicksort and Heapsort Algorithms ExplainedRahul SaxenaBelum ada peringkat
- Balino, Shedina D. Beed 2-CDokumen5 halamanBalino, Shedina D. Beed 2-CSHEDINA BALINOBelum ada peringkat
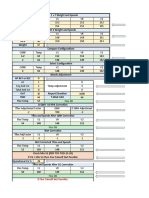
- A320 Flex CalculationDokumen10 halamanA320 Flex CalculationMansour TaoualiBelum ada peringkat
- 2219 Aluminium Alloy - WikipediaDokumen2 halaman2219 Aluminium Alloy - WikipediaVysakh VasudevanBelum ada peringkat
- Harvard Referencing ManualDokumen31 halamanHarvard Referencing ManualАлина ЛовицкаяBelum ada peringkat
- Ausa 300-RH - en Parts ManualDokumen93 halamanAusa 300-RH - en Parts ManualandrewhBelum ada peringkat
- Spe 143287 MS PDokumen11 halamanSpe 143287 MS PbvkvijaiBelum ada peringkat
- Off-Highway 6600 Series Transmission SpecsDokumen2 halamanOff-Highway 6600 Series Transmission SpecsIng Dimatiguz0% (1)
- Simulation and Performance of Double Gate Finfet Devices: B.Sethupathy, P.Aruna PriyaDokumen3 halamanSimulation and Performance of Double Gate Finfet Devices: B.Sethupathy, P.Aruna PriyaKrisumraj PurkaitBelum ada peringkat
- Regulation of AlternatorDokumen6 halamanRegulation of Alternatorkudupudinagesh100% (1)
- Advantages and Disadvantages of EscalatorsDokumen2 halamanAdvantages and Disadvantages of EscalatorsMuhammad Nabill Jeffri100% (1)
- Report CategoryWiseSECCVerification 315700301009 08 2019Dokumen2 halamanReport CategoryWiseSECCVerification 315700301009 08 2019Sandeep ChauhanBelum ada peringkat
- Mastering EES Chapter1Dokumen66 halamanMastering EES Chapter1mianvaherBelum ada peringkat
- Universal Chargers and GaugesDokumen2 halamanUniversal Chargers and GaugesFaizal JamalBelum ada peringkat
- Ticket SunilDokumen2 halamanTicket SunilDURGA PRASAD TRIPATHYBelum ada peringkat
- The Importance of Understanding A CommunityDokumen23 halamanThe Importance of Understanding A Communityra sBelum ada peringkat
- Preview-9780429675119 A38620781Dokumen53 halamanPreview-9780429675119 A38620781Milton Alexandre ZiehlsdorffBelum ada peringkat
- Chapter 2 - Key Themes of Environmental ScienceDokumen34 halamanChapter 2 - Key Themes of Environmental ScienceJames Abuya BetayoBelum ada peringkat
- WP 13 General Annexes - Horizon 2023 2024 - enDokumen43 halamanWP 13 General Annexes - Horizon 2023 2024 - enLuchianBelum ada peringkat
- Hydrocarbon TechnologyDokumen21 halamanHydrocarbon Technologyghatak2100% (1)
- Ata 47-NGS R25Dokumen148 halamanAta 47-NGS R25NadirBelum ada peringkat
- L1Dokumen7 halamanL1Francisco Roberto Trujillo LeonBelum ada peringkat
- Summative Test in Grade 10 ScienceDokumen2 halamanSummative Test in Grade 10 ScienceRomeo GabitananBelum ada peringkat
- Preparation for the entrance examDokumen4 halamanPreparation for the entrance examMinh ChâuBelum ada peringkat
- Phil of DepressDokumen11 halamanPhil of DepressPriyo DjatmikoBelum ada peringkat
- Evolution of Telecommunications GenerationsDokumen45 halamanEvolution of Telecommunications GenerationsSai RamBelum ada peringkat
- SATA Product Manual: Standard ModelsDokumen32 halamanSATA Product Manual: Standard ModelsEdy AprilyantoBelum ada peringkat
- 268US03 Oiltech Technical & Product Catalogue Letter WDokumen48 halaman268US03 Oiltech Technical & Product Catalogue Letter WMauricio CarestiaBelum ada peringkat