Anda mungkin juga menyukai
- Ba GastrectomyDokumen10 halamanBa GastrectomyHope3750% (2)
- Music Education (Kodaly Method)Dokumen4 halamanMusic Education (Kodaly Method)Nadine van Dyk100% (2)
- Instruction Manual: AH-250H Automatic Hitch Feed Metal Cutting Band Saw (415V) 280 X 250mm (W X H) RectangleDokumen134 halamanInstruction Manual: AH-250H Automatic Hitch Feed Metal Cutting Band Saw (415V) 280 X 250mm (W X H) Rectanglemaicon sulivanBelum ada peringkat
- Denison Hydraulics Proportional Pressure Control Valves: Series P2 & 4VP01Dokumen12 halamanDenison Hydraulics Proportional Pressure Control Valves: Series P2 & 4VP01abuzer1981Belum ada peringkat
- InfoVista Xeus Pro 5 TMR Quick GuideDokumen76 halamanInfoVista Xeus Pro 5 TMR Quick GuideNguyen Dang KhanhBelum ada peringkat
- Why-Most Investors Are Mostly Wrong Most of The TimeDokumen3 halamanWhy-Most Investors Are Mostly Wrong Most of The TimeBharat SahniBelum ada peringkat
- Simplex HandpumpsDokumen11 halamanSimplex HandpumpsMichalis GeorgiouBelum ada peringkat
- Linkage in Farm MachineryDokumen4 halamanLinkage in Farm MachineryRehan RashidBelum ada peringkat
- Design of Post Hole Digger Machine IJERTV3IS030320Dokumen5 halamanDesign of Post Hole Digger Machine IJERTV3IS030320Ajit KalasaitBelum ada peringkat
- GMD 16 20 Operators ManualDokumen80 halamanGMD 16 20 Operators ManualVladimir ArsicBelum ada peringkat
- Honeywell Sensing Potentiometers 380 Rv4 485 53c 385 Datasheet 32301266 A enDokumen47 halamanHoneywell Sensing Potentiometers 380 Rv4 485 53c 385 Datasheet 32301266 A enJose CaballeroBelum ada peringkat
- 3 PTL MBD SimulationDokumen8 halaman3 PTL MBD SimulationSumit SheoranBelum ada peringkat
- Motor Master 20000 SeriesDokumen56 halamanMotor Master 20000 SeriesArnulfo Lavares100% (1)
- Lesson 3 - Hydraulic PumpDokumen10 halamanLesson 3 - Hydraulic PumppowertrainlBelum ada peringkat
- ErmetoDokumen28 halamanErmetoRickson Viahul Rayan C100% (1)
- 2015-16 Hose Tubes and Ducting Section PDFDokumen98 halaman2015-16 Hose Tubes and Ducting Section PDFRajpal SharmaBelum ada peringkat
- Large Bore High Pressure Hydraulic Cylinders SeriesDokumen18 halamanLarge Bore High Pressure Hydraulic Cylinders SeriesHYDRAULICGURUBelum ada peringkat
- Hydraulic Oil FiltersDokumen7 halamanHydraulic Oil FiltersUjjwal BansalBelum ada peringkat
- Fluid Lines FittingsDokumen61 halamanFluid Lines FittingsVy ThoaiBelum ada peringkat
- 02 Operating Procedures - Ver1Dokumen104 halaman02 Operating Procedures - Ver1Jorge Sobrevilla100% (1)
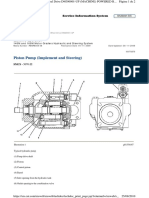
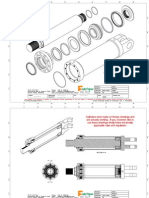
- Piston Pump (Implement and Steering)Dokumen2 halamanPiston Pump (Implement and Steering)kiddrix gamerBelum ada peringkat
- Session 12 en Logic Element-Cartridge Valve NoRestrictionDokumen5 halamanSession 12 en Logic Element-Cartridge Valve NoRestrictionahmed elkhoulyBelum ada peringkat
- Bulletin 800T Watertight/Oiltight Selector Switches: InstallationDokumen20 halamanBulletin 800T Watertight/Oiltight Selector Switches: InstallationalbertogbtBelum ada peringkat
- Full Text 02Dokumen112 halamanFull Text 02Như Nguyễn Trần ThảoBelum ada peringkat
- 376 IBS V09-120327 Electro-Hydraulic-Thruster DIN15430 enDokumen8 halaman376 IBS V09-120327 Electro-Hydraulic-Thruster DIN15430 enrajeevkumarrajeevBelum ada peringkat
- NEOTHERM 70 EVO - 60V Manual - P1600 PDFDokumen23 halamanNEOTHERM 70 EVO - 60V Manual - P1600 PDFm_armouti100% (1)
- ME597 Lecture1 11Dokumen33 halamanME597 Lecture1 11Tihomir Markovic100% (1)
- MC Pump and Valve Training 11-10-17Dokumen34 halamanMC Pump and Valve Training 11-10-17Jesus N Rodriguez100% (1)
- DA-2002 Hydraulic Fluid Power-General Rules Related To Systems Ver2SE07Dokumen15 halamanDA-2002 Hydraulic Fluid Power-General Rules Related To Systems Ver2SE07Maximiliano DreyerBelum ada peringkat
- Fundamentals of HVOF Spray For Reconditioning ComponentsDokumen49 halamanFundamentals of HVOF Spray For Reconditioning ComponentsEdgard Molina100% (1)
- Unit 24: Applications of Pneumatics and HydraulicsDokumen15 halamanUnit 24: Applications of Pneumatics and HydraulicsEmad ElsaidBelum ada peringkat
- Hydraulic Commissioning ManualDokumen7 halamanHydraulic Commissioning Manualranjit2150Belum ada peringkat
- High Precision Position Control of Electro-Hydraulic Servo SystemDokumen10 halamanHigh Precision Position Control of Electro-Hydraulic Servo Systemamin342Belum ada peringkat
- Aircraft Refuelling HoseDokumen4 halamanAircraft Refuelling HoseBimo IndroBelum ada peringkat
- LSM How It WorksDokumen10 halamanLSM How It WorksAnonymous 98TkC9zQ5100% (1)
- Hyd Power Unit 5831Dokumen119 halamanHyd Power Unit 5831Victor RoblesBelum ada peringkat
- Hydraulic Brake Systems and Components For Off-Highway Vehicles and EquipmentDokumen10 halamanHydraulic Brake Systems and Components For Off-Highway Vehicles and EquipmentJenner Volnney Quispe ChataBelum ada peringkat
- 7 PVG ActuatorsDokumen87 halaman7 PVG ActuatorsJose Manuel Barroso PantojaBelum ada peringkat
- ASEAN ASMR Hydraulic Pumps and Motors Rev3 PDFDokumen185 halamanASEAN ASMR Hydraulic Pumps and Motors Rev3 PDFTan Loc NguyenBelum ada peringkat
- DP p025 01 El 0003 Schematic Diagram MDB 2Dokumen1 halamanDP p025 01 El 0003 Schematic Diagram MDB 2finix33Belum ada peringkat
- Sequential Motion Control PDFDokumen608 halamanSequential Motion Control PDFTEsted TesterBelum ada peringkat
- PEC K Series PotentiometersDokumen3 halamanPEC K Series PotentiometersAlexandre S. CorrêaBelum ada peringkat
- SMC Air Unit Catalog - นิวเมติกDokumen15 halamanSMC Air Unit Catalog - นิวเมติกmon012100% (1)
- Aircraft Mechanical Systems: Setyo Hariyadi S.PDokumen130 halamanAircraft Mechanical Systems: Setyo Hariyadi S.PMaruf AminBelum ada peringkat
- HYDAC Understanding Hydraulics2 MAR 2015Dokumen4 halamanHYDAC Understanding Hydraulics2 MAR 2015marc271986Belum ada peringkat
- Caterpillar 988 Wheel Loader Operators Manual SN 87aDokumen6 halamanCaterpillar 988 Wheel Loader Operators Manual SN 87aCarlos Cetina100% (1)
- Aa2fm Model CodeDokumen27 halamanAa2fm Model CodeCristianBelum ada peringkat
- Day 1b - Introduction To Fluid Power SystemDokumen32 halamanDay 1b - Introduction To Fluid Power SystemVenkatesh GangadharBelum ada peringkat
- Hydraulic IndustrialDokumen56 halamanHydraulic IndustrialKuni Faizah100% (1)
- Inspector 920 Operation Manual 2.0.3d GreenDokumen36 halamanInspector 920 Operation Manual 2.0.3d GreenJosé AlcocerBelum ada peringkat
- M1 Series: SCR, Adjustable Speed Drives For DC Brush MotorsDokumen52 halamanM1 Series: SCR, Adjustable Speed Drives For DC Brush MotorsRodolfo ArosemenaBelum ada peringkat
- Rexroth Hydrostatic Fan Drives - Ra98065 - 1006Dokumen20 halamanRexroth Hydrostatic Fan Drives - Ra98065 - 1006MattH3Belum ada peringkat
- Hydraulic CylindersDokumen10 halamanHydraulic CylindersBrandon Ha100% (1)
- Dinison High Flow Seat Valve - Ver 7-En 5060-ADokumen26 halamanDinison High Flow Seat Valve - Ver 7-En 5060-AKlaus Høj HenriksenBelum ada peringkat
- Parker Hydraulic Hoses, Fittings and Equipment Catalogue CAT - 4400 - UKDokumen580 halamanParker Hydraulic Hoses, Fittings and Equipment Catalogue CAT - 4400 - UKRhdh kldmkBelum ada peringkat
- V80647 Parker Series 15-30P High Pressure FiltersDokumen12 halamanV80647 Parker Series 15-30P High Pressure FiltersPaulPaucarCamposBelum ada peringkat
- BS Iso 6099-2009Dokumen80 halamanBS Iso 6099-2009prf1975Belum ada peringkat
- Radex Filter CatridgeDokumen13 halamanRadex Filter Catridgemarceilinus devaluanto100% (1)
- Hydraulic SystemsDokumen42 halamanHydraulic SystemsGauthamBelum ada peringkat
- H Electro Hydraulic Controls YukenDokumen142 halamanH Electro Hydraulic Controls Yukenchidambaram kasi100% (1)
- Cat Hy14 1600 Denison Products PDFDokumen438 halamanCat Hy14 1600 Denison Products PDFEmiliano MercadoBelum ada peringkat
- Linear Actuators-Hydraulic CylindersDokumen18 halamanLinear Actuators-Hydraulic CylindersMohan CharanchathBelum ada peringkat
- MCE416 Moodle 6 ActuatorDokumen42 halamanMCE416 Moodle 6 ActuatorPaul KonduBelum ada peringkat
- Southern Marine Engineering Desk Reference: Second Edition Volume IiDari EverandSouthern Marine Engineering Desk Reference: Second Edition Volume IiBelum ada peringkat
- Chapter One Agricultural TractorDokumen67 halamanChapter One Agricultural TractorSiraj Busse100% (1)
- Chapter 1 Introduction Farm MachineryDokumen21 halamanChapter 1 Introduction Farm MachinerySiraj Busse0% (1)
- Sas/Or 14.3 User's Guide: The Nonlinear Programming SolverDokumen63 halamanSas/Or 14.3 User's Guide: The Nonlinear Programming SolverSiraj BusseBelum ada peringkat
- Part I Soil Engaging Components PDFDokumen7 halamanPart I Soil Engaging Components PDFSiraj BusseBelum ada peringkat
- Chapter 2 Tillage ImplementsDokumen35 halamanChapter 2 Tillage ImplementsSiraj Busse100% (1)
- Chapter 8: Fluid Basic Electrical and Logic Control SystemDokumen34 halamanChapter 8: Fluid Basic Electrical and Logic Control SystemSiraj BusseBelum ada peringkat
- Part II Furrow Opener Depth Control Components PDFDokumen3 halamanPart II Furrow Opener Depth Control Components PDFSiraj Busse100% (1)
- Chapter 5.design of Sowing and Planting MachineDokumen5 halamanChapter 5.design of Sowing and Planting MachineSiraj Busse100% (2)
- Chapter 1 Introduction To Fluid PowerDokumen33 halamanChapter 1 Introduction To Fluid PowerSiraj Busse100% (4)
- Hydraulic Cylinder by Syed Jaffer PDFDokumen39 halamanHydraulic Cylinder by Syed Jaffer PDFSiraj Busse100% (7)
- Chapter 2 Physical Properties of Hydraulic FluidDokumen26 halamanChapter 2 Physical Properties of Hydraulic FluidSiraj BusseBelum ada peringkat
- Chapter 1Dokumen32 halamanChapter 1Siraj BusseBelum ada peringkat
- Chapter FourDokumen27 halamanChapter FourSiraj BusseBelum ada peringkat
- Chapter One: Introduction To Draught Technology: Draught Animal Technology Lecture Notes By: Siraj KedirDokumen27 halamanChapter One: Introduction To Draught Technology: Draught Animal Technology Lecture Notes By: Siraj KedirSiraj BusseBelum ada peringkat
- Chapter 3: Engine and Vehicle Testing: BAE 517 - Lecture 3Dokumen24 halamanChapter 3: Engine and Vehicle Testing: BAE 517 - Lecture 3Siraj BusseBelum ada peringkat
- Chapter 1Dokumen32 halamanChapter 1Siraj BusseBelum ada peringkat
- Chapter 2: Engine Performance Measures: BAE 517 - Lecture 2Dokumen40 halamanChapter 2: Engine Performance Measures: BAE 517 - Lecture 2Siraj BusseBelum ada peringkat
- 6.1. Pack Animals: Chapter 6: Equipment For TransportDokumen16 halaman6.1. Pack Animals: Chapter 6: Equipment For TransportSiraj BusseBelum ada peringkat
- Chapter 1: Development of Off-Road Vehicles: BAE 517 - Lecture 1Dokumen29 halamanChapter 1: Development of Off-Road Vehicles: BAE 517 - Lecture 1Siraj BusseBelum ada peringkat
- 5.1. Air Preparation: Chapter 5: Pneumatic SystemsDokumen36 halaman5.1. Air Preparation: Chapter 5: Pneumatic SystemsSiraj BusseBelum ada peringkat
- 3.1 Hydraulic PumpDokumen22 halaman3.1 Hydraulic PumpSiraj BusseBelum ada peringkat
- Topic: Chapter One: Introduction To Draught Animal TechnologyDokumen44 halamanTopic: Chapter One: Introduction To Draught Animal TechnologySiraj BusseBelum ada peringkat
- Chapter 1Dokumen43 halamanChapter 1Siraj BusseBelum ada peringkat
- MU151 Group Assignment 6Dokumen3 halamanMU151 Group Assignment 6Jay CadienteBelum ada peringkat
- Simplified Cost Accounting Part Ii: Solutions ManualDokumen58 halamanSimplified Cost Accounting Part Ii: Solutions ManualAnthony Koko CarlobosBelum ada peringkat
- PctcostepoDokumen4 halamanPctcostepoRyan Frikkin MurgaBelum ada peringkat
- ch09 (POM)Dokumen35 halamanch09 (POM)jayvee cahambingBelum ada peringkat
- Total Recall and SkepticismDokumen4 halamanTotal Recall and Skepticismdweiss99Belum ada peringkat
- Calcutta Bill - Abhimanyug@Dokumen2 halamanCalcutta Bill - Abhimanyug@abhimanyugirotraBelum ada peringkat
- LITERATURE MATRIX PLAN LastimosaDokumen2 halamanLITERATURE MATRIX PLAN LastimosaJoebelle LastimosaBelum ada peringkat
- Early Pregnancy and Its Effect On The Mental Health of Students in Victoria Laguna"Dokumen14 halamanEarly Pregnancy and Its Effect On The Mental Health of Students in Victoria Laguna"Gina HerraduraBelum ada peringkat
- RCPI V VerchezDokumen2 halamanRCPI V VerchezCin100% (1)
- Final BasantDokumen22 halamanFinal BasantMuqaddas IsrarBelum ada peringkat
- 100 Commonly Asked Interview QuestionsDokumen6 halaman100 Commonly Asked Interview QuestionsRaluca SanduBelum ada peringkat
- Bahasa Inggris XIIDokumen1 halamanBahasa Inggris XIIclaudiaomega.pBelum ada peringkat
- Theology and Pipe Smoking - 7pDokumen7 halamanTheology and Pipe Smoking - 7pNeimar HahmeierBelum ada peringkat
- MC2 Sewing Patterns: Dressmaking Learning ModuleDokumen91 halamanMC2 Sewing Patterns: Dressmaking Learning ModuleMargie JariñoBelum ada peringkat
- Practical Interpretation and Application of Exoc Rine Panc Rea Tic Tes Ting in Small AnimalsDokumen20 halamanPractical Interpretation and Application of Exoc Rine Panc Rea Tic Tes Ting in Small Animalsl.fernandagonzalez97Belum ada peringkat
- Acc 106 Ebook Answer Topic 4Dokumen13 halamanAcc 106 Ebook Answer Topic 4syifa azhari 3BaBelum ada peringkat
- Deeg Palace Write-UpDokumen7 halamanDeeg Palace Write-UpMuhammed Sayyaf AcBelum ada peringkat
- Fundamentals of Marketing Management: by Prabhat Ranjan Choudhury, Sr. Lecturer, B.J.B (A) College, BhubaneswarDokumen53 halamanFundamentals of Marketing Management: by Prabhat Ranjan Choudhury, Sr. Lecturer, B.J.B (A) College, Bhubaneswarprabhatrc4235Belum ada peringkat
- Lesson Plan 2 Revised - Morgan LegrandDokumen19 halamanLesson Plan 2 Revised - Morgan Legrandapi-540805523Belum ada peringkat
- Occupant Response To Vehicular VibrationDokumen16 halamanOccupant Response To Vehicular VibrationAishhwarya Priya100% (1)
- BSP Training MatrixDokumen2 halamanBSP Training MatrixLeonisa V. BraganzaBelum ada peringkat
- End-To-End Lung Cancer Screening With Three-Dimensional Deep Learning On Low-Dose Chest Computed TomographyDokumen25 halamanEnd-To-End Lung Cancer Screening With Three-Dimensional Deep Learning On Low-Dose Chest Computed TomographyLe Vu Ky NamBelum ada peringkat
- AVEVA Work Permit ManagerDokumen2 halamanAVEVA Work Permit ManagerMohamed Refaat100% (1)
- Fault Detection of Gear Using Spectrum and CepstruDokumen6 halamanFault Detection of Gear Using Spectrum and Cepstruराकेश झाBelum ada peringkat
- Eurokids Parent Manual (ECity) - PDF-EJ and ESDokumen18 halamanEurokids Parent Manual (ECity) - PDF-EJ and ESsabarin_72100% (2)
- Norman 2017Dokumen7 halamanNorman 2017Lee HaeunBelum ada peringkat