Anda mungkin juga menyukai
- Nonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentDari EverandNonlinear Kalman Filter for Multi-Sensor Navigation of Unmanned Aerial Vehicles: Application to Guidance and Navigation of Unmanned Aerial Vehicles Flying in a Complex EnvironmentBelum ada peringkat
- Hierarchical Control System: Fundamentals and ApplicationsDari EverandHierarchical Control System: Fundamentals and ApplicationsBelum ada peringkat
- Eatr: Energetically Autonomous Tactical RobotDokumen32 halamanEatr: Energetically Autonomous Tactical RobotJoseph Ford Jr.75% (4)
- Overview of EATR Project Brief 6 April 09Dokumen6 halamanOverview of EATR Project Brief 6 April 09DanBelum ada peringkat
- Aerial Robotics For Team 1Dokumen8 halamanAerial Robotics For Team 1brenda yadira lopez solanoBelum ada peringkat
- Smart Spraying SystemDokumen6 halamanSmart Spraying SystemAarthyBelum ada peringkat
- The Humanoid Robot ARMAR: Design and Control: June 2004Dokumen7 halamanThe Humanoid Robot ARMAR: Design and Control: June 2004Sulagna RoyBelum ada peringkat
- Design and Development of A Low Cost RescueDokumen5 halamanDesign and Development of A Low Cost RescueNazmul Shikder RiyadhBelum ada peringkat
- Kinematic Analysis of Open-Source 5 DoF Robot Arm (#843139) - 1456378Dokumen10 halamanKinematic Analysis of Open-Source 5 DoF Robot Arm (#843139) - 1456378Mohammad GamalBelum ada peringkat
- Real-Time Embedded Control System For VTOL Aircrafts: Application To Stabilize A Quad-Rotor HelicopterDokumen6 halamanReal-Time Embedded Control System For VTOL Aircrafts: Application To Stabilize A Quad-Rotor HelicopterasdssBelum ada peringkat
- B.E Mech Batchno 107Dokumen57 halamanB.E Mech Batchno 107saravana murthyBelum ada peringkat
- Exoskeleton FpgaDokumen5 halamanExoskeleton Fpgachristian_chicomarBelum ada peringkat
- A Search and Rescue Robot With Tele-Operated Tether Docking SystemDokumen7 halamanA Search and Rescue Robot With Tele-Operated Tether Docking SystemSoumen BanerjeeBelum ada peringkat
- RtosandconceptsDokumen26 halamanRtosandconceptsRaghav MittalBelum ada peringkat
- Robots in Manufacturing: Applications and ImpactsDokumen13 halamanRobots in Manufacturing: Applications and ImpactsdevashBelum ada peringkat
- Sensors 19 00648Dokumen29 halamanSensors 19 00648qwertzuiopBelum ada peringkat
- Fundamentals of Robotics: Brief HistoryDokumen10 halamanFundamentals of Robotics: Brief HistorymikeemackBelum ada peringkat
- FALLSEM2022-23 MEE1030 ETH VL2022230100648 REFERENCE MATERIAL Unit-IDokumen37 halamanFALLSEM2022-23 MEE1030 ETH VL2022230100648 REFERENCE MATERIAL Unit-IYashBelum ada peringkat
- Robotics Helicopter Control and Its Applications in EngineeringDokumen6 halamanRobotics Helicopter Control and Its Applications in EngineeringInternational Journal of computational Engineering research (IJCER)Belum ada peringkat
- Electric Agricultural Robot With Multi-Layer-Control: Griepentrog, Hans W. Jæger-Hansen, Claes Lund Dühring, KarinaDokumen7 halamanElectric Agricultural Robot With Multi-Layer-Control: Griepentrog, Hans W. Jæger-Hansen, Claes Lund Dühring, KarinamsnsaikiranBelum ada peringkat
- TranningDokumen17 halamanTranningHeera PrajapatBelum ada peringkat
- Robotics and Drone Use Cases and Technologies ExplainedDokumen5 halamanRobotics and Drone Use Cases and Technologies ExplainedpppooBelum ada peringkat
- Bet'S Basavakalyan Engineering College BASAVAKALYAN-585327: "RF Controlled Multi-Terrain Robot"Dokumen20 halamanBet'S Basavakalyan Engineering College BASAVAKALYAN-585327: "RF Controlled Multi-Terrain Robot"Abhay BhujBelum ada peringkat
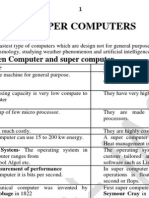
- Supercomputers and artificial intelligenceDokumen3 halamanSupercomputers and artificial intelligenceshreeyogi100% (1)
- Atlas & Surena IV: Mechanisms and Sensors of Humanoid RobotsDokumen6 halamanAtlas & Surena IV: Mechanisms and Sensors of Humanoid Robotsxhanto shahinulBelum ada peringkat
- 25 Digital20 Avionics Pastor PDFDokumen9 halaman25 Digital20 Avionics Pastor PDF083898025012Belum ada peringkat
- UPM-SPQR Rescue Virtual Robots Team Description PaperDokumen8 halamanUPM-SPQR Rescue Virtual Robots Team Description Paperkinghez74Belum ada peringkat
- Project Report PDFDokumen22 halamanProject Report PDFSubrata PalBelum ada peringkat
- Mechatronics Navigation GreenhosesDokumen28 halamanMechatronics Navigation GreenhosesVänhëë ËscöbärBelum ada peringkat
- Josh ReportDokumen29 halamanJosh ReportJ.CBelum ada peringkat
- 120 1460965453 - 18-04-2016 PDFDokumen4 halaman120 1460965453 - 18-04-2016 PDFEditor IJRITCCBelum ada peringkat
- Robotics Lab Manuals Final PDFDokumen38 halamanRobotics Lab Manuals Final PDFravihbti100% (1)
- Robotics & AutomationDokumen20 halamanRobotics & AutomationHans wilsonBelum ada peringkat
- V. Machine Equivalence To Biological Systems: D. Tesar, The University of Texas at Austin, March 24, 2005Dokumen4 halamanV. Machine Equivalence To Biological Systems: D. Tesar, The University of Texas at Austin, March 24, 2005ajaycasperBelum ada peringkat
- RoboticsDokumen20 halamanRoboticssudipta nandiBelum ada peringkat
- Unit 1: Introduction To Embedded SystemsDokumen49 halamanUnit 1: Introduction To Embedded SystemsJoel100% (1)
- Industrial Control and Automation AssignmentDokumen3 halamanIndustrial Control and Automation AssignmentJoao CarvalhoBelum ada peringkat
- Autonomous Robot Delivery Case StudyDokumen8 halamanAutonomous Robot Delivery Case StudySaudin TantriBelum ada peringkat
- Spider-Bots: A Low Cost Cooperative Robotics Platform: Damien Laird Jack Price Ioannis A. RaptisDokumen6 halamanSpider-Bots: A Low Cost Cooperative Robotics Platform: Damien Laird Jack Price Ioannis A. RaptisLuis RuizBelum ada peringkat
- Robotics and AutomationDokumen130 halamanRobotics and AutomationtycsdepartmentBelum ada peringkat
- ARDUINO WALL FOLLOWERDokumen32 halamanARDUINO WALL FOLLOWERchaitBelum ada peringkat
- Sensitivity-Based Adaptive SRUKF For State, Parameter, and Covariance Estimation On Mechatronic SystemsDokumen23 halamanSensitivity-Based Adaptive SRUKF For State, Parameter, and Covariance Estimation On Mechatronic Systemshendra lamBelum ada peringkat
- Ris Module1 Bai 3603Dokumen18 halamanRis Module1 Bai 3603ANKIT UPADHYAYBelum ada peringkat
- MQ-1 Predator DroneDokumen15 halamanMQ-1 Predator DroneKrunal AriwalaBelum ada peringkat
- Experimental Autonomous Flight of A Small-Scaled Helicopter Using Accurate Dynamics Model and Low-Cost SensorsDokumen9 halamanExperimental Autonomous Flight of A Small-Scaled Helicopter Using Accurate Dynamics Model and Low-Cost SensorsSri SaiBelum ada peringkat
- Embedded Systems 12001046 3CE2Dokumen16 halamanEmbedded Systems 12001046 3CE2Nirmal SinghBelum ada peringkat
- Quadcopter Research PaperDokumen5 halamanQuadcopter Research Papergmannevnd100% (1)
- Surveillance Drones and Their ApplicationsDokumen4 halamanSurveillance Drones and Their ApplicationsAryan RautBelum ada peringkat
- Lec3 Robot TechnologyDokumen19 halamanLec3 Robot TechnologyPriya SubramanianBelum ada peringkat
- An Embedded Real-Time System For Autonomous Flight ControlDokumen10 halamanAn Embedded Real-Time System For Autonomous Flight ControlIlham JuniusBelum ada peringkat
- The Chimera II Real-Time Operating System For Advanced Sensor-Based Control ApplicationsDokumen22 halamanThe Chimera II Real-Time Operating System For Advanced Sensor-Based Control ApplicationsMárcio FerreiraBelum ada peringkat
- Basic RoboticsDokumen3 halamanBasic RoboticsHugues GeschwindenhammerBelum ada peringkat
- Robotics Study Material Google DocsDokumen25 halamanRobotics Study Material Google DocsNikhil AgrawalBelum ada peringkat
- MULTIROBOTDokumen23 halamanMULTIROBOTsujithmuprojectsBelum ada peringkat
- Soft Copy On RoboticsDokumen18 halamanSoft Copy On RoboticsRaghavendra RaghavBelum ada peringkat
- Autonomous Vehicle With Machine Vision and Integrated Sensor Suite Based On Internet-of-Things TechnologiesDokumen13 halamanAutonomous Vehicle With Machine Vision and Integrated Sensor Suite Based On Internet-of-Things TechnologiesIvan CheahBelum ada peringkat
- Robotics Unit-5 Question BankDokumen6 halamanRobotics Unit-5 Question BankveerapandianBelum ada peringkat
- Tank Radar Control SystemsDokumen17 halamanTank Radar Control SystemsKUBİLAY KURTBelum ada peringkat
- RoboticsDokumen18 halamanRoboticslakshmigsr6610100% (1)
- Final Report: Experimental Study of Robotic Assembly and Force Control TasksDokumen28 halamanFinal Report: Experimental Study of Robotic Assembly and Force Control Tasksrsatelliteara_465614Belum ada peringkat
- ChaosDokumen2 halamanChaosDawid KatBelum ada peringkat
- ChaosDokumen2 halamanChaosDawid KatBelum ada peringkat
- Knight Eod RobotDokumen11 halamanKnight Eod RobotDawid KatBelum ada peringkat
- AEODRS-The Future of UGVsDokumen5 halamanAEODRS-The Future of UGVsDawid KatBelum ada peringkat
- Stockdale Method Roundabout PDFDokumen50 halamanStockdale Method Roundabout PDFAnonymous O7BzqVvmIBelum ada peringkat
- Flipkart's Big Billion Day Sale IT FailuresDokumen21 halamanFlipkart's Big Billion Day Sale IT FailuresManisha KumariBelum ada peringkat
- Cable Laying Equipment: CCC (Underwater Engineering) SalDokumen5 halamanCable Laying Equipment: CCC (Underwater Engineering) Sallaleye_olumideBelum ada peringkat
- Crossing The Bridge The Effects of Time Varying Tolls On Curbing Congestion 2016 Transportation Research Part A Policy and PracticeDokumen19 halamanCrossing The Bridge The Effects of Time Varying Tolls On Curbing Congestion 2016 Transportation Research Part A Policy and PracticeZen ZeeBelum ada peringkat
- Developer Feasibility StudyDokumen9 halamanDeveloper Feasibility Studysam dorilloBelum ada peringkat
- Kitz Gate ValveDokumen28 halamanKitz Gate ValvemohamedfirozBelum ada peringkat
- Public Schools Project Baseline ScheduleDokumen87 halamanPublic Schools Project Baseline ScheduleAswin KurupBelum ada peringkat
- My Updated CVDokumen5 halamanMy Updated CVSaleem UddinBelum ada peringkat
- Ch03 TurbanDokumen38 halamanCh03 TurbanIndi FebriBelum ada peringkat
- Topic 2 - Cargo Handling and StowageDokumen17 halamanTopic 2 - Cargo Handling and StowageHemonBelum ada peringkat
- OSA-06-Vibration Fatigue Analysis of Sheet Metal Mahindra2wheelerDokumen11 halamanOSA-06-Vibration Fatigue Analysis of Sheet Metal Mahindra2wheelerikramishereBelum ada peringkat
- A Burners PDFDokumen37 halamanA Burners PDFaldoking202028Belum ada peringkat
- SCM CostsDokumen9 halamanSCM CostsArnav VatsBelum ada peringkat
- E - Bike Market.Dokumen86 halamanE - Bike Market.masterineducation100% (1)
- Fabrication Processes: Cold Working Hot Working Castings Powder Metallurgy Machining Joining/WeldingDokumen41 halamanFabrication Processes: Cold Working Hot Working Castings Powder Metallurgy Machining Joining/WeldingVenai SeelochanBelum ada peringkat
- CHRIST (Deemed to be University) School of Engineering and Technology Department of Mechanical and Automobile Engineering ME636OE4 – PROJECT MANAGEMENT ASSIGNMENT #1Dokumen5 halamanCHRIST (Deemed to be University) School of Engineering and Technology Department of Mechanical and Automobile Engineering ME636OE4 – PROJECT MANAGEMENT ASSIGNMENT #1NIRMAL RAJESH 1860434Belum ada peringkat
- Business Process ModelingDokumen89 halamanBusiness Process ModelingAhsan Zaman100% (2)
- 01JUN TardeDokumen259 halaman01JUN TardeDanBarberaBelum ada peringkat
- EpicorSLS10 MigrateGuide SQL 10.2.100.505100Dokumen219 halamanEpicorSLS10 MigrateGuide SQL 10.2.100.505100Marianne Hernandez MendietaBelum ada peringkat
- METHOD STATEMENT PRESSURE SWITCH UAE Univ.Dokumen2 halamanMETHOD STATEMENT PRESSURE SWITCH UAE Univ.Muhamed RasheedBelum ada peringkat
- Fuzzy Logic Based FMEA Robust Design A Quantitative Approach For Robustness Against Groupthink in Group Team Decision MakingDokumen15 halamanFuzzy Logic Based FMEA Robust Design A Quantitative Approach For Robustness Against Groupthink in Group Team Decision MakingMiguel LozanoBelum ada peringkat
- Smart Sketch GuideDokumen690 halamanSmart Sketch Guidesenthilsp3d100% (1)
- Honda Sales ProjectDokumen72 halamanHonda Sales Projectsurendar100% (2)
- Company Introduction PDFDokumen11 halamanCompany Introduction PDFVishwanath ShervegarBelum ada peringkat
- Sudhakar ProjDokumen71 halamanSudhakar ProjsureshexecutiveBelum ada peringkat
- Eccma February2008Newsletter PDFDokumen19 halamanEccma February2008Newsletter PDFprsiva2420034066Belum ada peringkat
- عرض فني و مالي شامل كل التخصصات الهندسيةDokumen7 halamanعرض فني و مالي شامل كل التخصصات الهندسيةAnonymous qOBFvIBelum ada peringkat
- Test ReportDokumen5 halamanTest ReportluongdunBelum ada peringkat
- Logistics Section 01 IntroductionDokumen40 halamanLogistics Section 01 IntroductionNgọc Nhung Vũ100% (2)
- Urban Planning With GisDokumen9 halamanUrban Planning With GisMostaque AhmedBelum ada peringkat