Anda mungkin juga menyukai
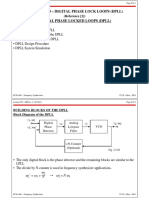
- Lecture 070 - Digital Phase Lock Loops (DPLL) Digital Phase Locked Loops (DPLL)Dokumen25 halamanLecture 070 - Digital Phase Lock Loops (DPLL) Digital Phase Locked Loops (DPLL)MustafaMuhammadBelum ada peringkat
- Linear IC Applications: A Designer's HandbookDari EverandLinear IC Applications: A Designer's HandbookPenilaian: 4 dari 5 bintang4/5 (1)
- ATS ConnectionDokumen1 halamanATS ConnectionKABIRU ABDULSALAMBelum ada peringkat
- 9 Power AmplifiersDokumen50 halaman9 Power AmplifiersAce Virgil VillaruzBelum ada peringkat
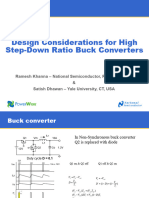
- KhannaDokumen47 halamanKhannaduy vu quangBelum ada peringkat
- Digital Integrated Circuits: A Design PerspectiveDokumen60 halamanDigital Integrated Circuits: A Design Perspectivesteves0118Belum ada peringkat
- The Inverters: Digital Integrated Circuits © Prentice Hall 1995Dokumen67 halamanThe Inverters: Digital Integrated Circuits © Prentice Hall 1995sam labineBelum ada peringkat
- Triangle-Wave Generator (TWG) Outputs Both Triangle and Square Waves. Twgs AreDokumen16 halamanTriangle-Wave Generator (TWG) Outputs Both Triangle and Square Waves. Twgs Aremuhaned190Belum ada peringkat
- Icl8038 PDFDokumen12 halamanIcl8038 PDFmarcosBelum ada peringkat
- 03 Sensorless ControlDokumen17 halaman03 Sensorless ControlGamarJanuzajBelum ada peringkat
- Onver e C Er (J : 9.9.2 The Dual-Slope ConverterDokumen3 halamanOnver e C Er (J : 9.9.2 The Dual-Slope ConverterRoni BagBelum ada peringkat
- Selection Guide Yl Ds150 eDokumen8 halamanSelection Guide Yl Ds150 epejakm1Belum ada peringkat
- Encoders Absolute PrincipiosDokumen1 halamanEncoders Absolute PrincipiosJose PauloBelum ada peringkat
- 2012-11-01:【技術專題】Digital Voltage Control of Boost CRM PFC Converters PDFDokumen23 halaman2012-11-01:【技術專題】Digital Voltage Control of Boost CRM PFC Converters PDFhord72Belum ada peringkat
- Half BridgeDokumen44 halamanHalf BridgeVenkatesh ShastryBelum ada peringkat
- ADCsDokumen19 halamanADCssebastian caicedoBelum ada peringkat
- Brno Flyback Design Rev1 PDFDokumen103 halamanBrno Flyback Design Rev1 PDFela81Belum ada peringkat
- TLV0831C etcTIDokumen21 halamanTLV0831C etcTIEsen KayaBelum ada peringkat
- D D D D D D D D D D: DescriptionDokumen12 halamanD D D D D D D D D D: DescriptionRogério MorenoBelum ada peringkat
- Chapter 2 The Basic Principles of OFDMDokumen30 halamanChapter 2 The Basic Principles of OFDMPartha P RoyBelum ada peringkat
- L44 5807 PDFDokumen27 halamanL44 5807 PDFbacuoc.nguyen356Belum ada peringkat
- Electrical Diagram Electric Duty Pump - DOL 1,1-45kWDokumen11 halamanElectrical Diagram Electric Duty Pump - DOL 1,1-45kWMBMBelum ada peringkat
- SFERE Energy Meter3706581013667435464Dokumen2 halamanSFERE Energy Meter3706581013667435464Cho Cho MyintBelum ada peringkat
- Lecture23 MOS SH 6upDokumen3 halamanLecture23 MOS SH 6upnadeemjuttBelum ada peringkat
- 01 - Sect 7 6 Modeling The Pulse Width Modulator - Sect7 6Dokumen6 halaman01 - Sect 7 6 Modeling The Pulse Width Modulator - Sect7 6Ananatha KarthikBelum ada peringkat
- CT TandeltaDokumen2 halamanCT Tandeltakishansai100% (2)
- Touch-Panel Controller Implemented With Ltps TFTS: Keechan Park, Jaeeun Pi, - Konkuk UniversityDokumen16 halamanTouch-Panel Controller Implemented With Ltps TFTS: Keechan Park, Jaeeun Pi, - Konkuk UniversitykeechanparkBelum ada peringkat
- Diomedes: Inno Vation T Ha T Lif Tsy OuDokumen2 halamanDiomedes: Inno Vation T Ha T Lif Tsy Outhanggimme.phanBelum ada peringkat
- Hardware Pace Using Slope DetectionDokumen18 halamanHardware Pace Using Slope DetectionGabriel GarcíaBelum ada peringkat
- Transmission Line Lightning StudyDokumen7 halamanTransmission Line Lightning StudyK.RamachandranBelum ada peringkat
- The Basic Principles of OFDMDokumen30 halamanThe Basic Principles of OFDMshakeebBelum ada peringkat
- DC Motor Drive: Power ElectronicsDokumen19 halamanDC Motor Drive: Power ElectronicsRishabh MalpotraBelum ada peringkat
- MVTC VT ItpDokumen5 halamanMVTC VT ItpSherifBelum ada peringkat
- Analog Interfacing Overview: Analog and Digital Signals Analog Interfacing MKL25Z Analog ModulesDokumen54 halamanAnalog Interfacing Overview: Analog and Digital Signals Analog Interfacing MKL25Z Analog Modulesjarvis 1011Belum ada peringkat
- SCADA TrainingDokumen53 halamanSCADA TrainingCojjo XenonBelum ada peringkat
- Adobe Scan 08 May 2023Dokumen5 halamanAdobe Scan 08 May 2023Swatantra PandeyBelum ada peringkat
- Serv1790 Slid PDFDokumen56 halamanServ1790 Slid PDFIngeniero ProyectosBelum ada peringkat
- Solar Cell I-V Cuk ConverterDokumen1 halamanSolar Cell I-V Cuk ConverterKORAKRIT ANANTA-AUOYPORNBelum ada peringkat
- Skyworth 32l01sw Chassis 8r10 SCHDokumen15 halamanSkyworth 32l01sw Chassis 8r10 SCHTaherdz RimouBelum ada peringkat
- Final Exam 15-06-2012 (Answered)Dokumen4 halamanFinal Exam 15-06-2012 (Answered)Cristian ToapantaBelum ada peringkat
- Buck Converter Circuit AnalysisDokumen5 halamanBuck Converter Circuit AnalysisselageaalinBelum ada peringkat
- Chapter 7 Adc Dac Ee 64Dokumen28 halamanChapter 7 Adc Dac Ee 64Manish KumarBelum ada peringkat
- Lecture 2Dokumen9 halamanLecture 2api-3833839Belum ada peringkat
- Chapter 9. Controller Design: 9.2. Effect of Negative Feedback On The Network Transfer FunctionsDokumen74 halamanChapter 9. Controller Design: 9.2. Effect of Negative Feedback On The Network Transfer FunctionsHoang ManhBelum ada peringkat
- Possible Ways To Add Resonant Components To The PWM Switch Cell: Classification of Resonant-Switch ConvertersDokumen11 halamanPossible Ways To Add Resonant Components To The PWM Switch Cell: Classification of Resonant-Switch ConvertersdjyBelum ada peringkat
- New IHR IGBT TechnologyDokumen4 halamanNew IHR IGBT TechnologyvittorioBelum ada peringkat
- Analog Grayscale sensor circuit diagramDokumen2 halamanAnalog Grayscale sensor circuit diagramRafael Pereira AzevedoBelum ada peringkat
- EE 4741 Power Electronics: Jungwon Choi, Jwchoi@umn - EduDokumen18 halamanEE 4741 Power Electronics: Jungwon Choi, Jwchoi@umn - EduTrung Nam HaBelum ada peringkat
- KIK614342 Electronic System Design: Semester Genap 2016/2017Dokumen22 halamanKIK614342 Electronic System Design: Semester Genap 2016/2017Muhamad Yusuf SupriadiBelum ada peringkat
- Basics of Power DevicesDokumen24 halamanBasics of Power Devicesjoa91189Belum ada peringkat
- TV and CRT Display Vertical Output IC With Bus Control SupportDokumen4 halamanTV and CRT Display Vertical Output IC With Bus Control SupportLuis RinconBelum ada peringkat
- SL Using R2015aDokumen11 halamanSL Using R2015aPaul Shine EugineBelum ada peringkat
- 08 IO InterfacingDokumen78 halaman08 IO InterfacingShreyas MaheshBelum ada peringkat
- Lecture 11 D-to-A Conversion 2019-2Dokumen29 halamanLecture 11 D-to-A Conversion 2019-2Vanderson Xavier vandilolBelum ada peringkat
- Direct Digital SynthesisDokumen50 halamanDirect Digital Synthesisiakram769809Belum ada peringkat
- ENL GatewayDokumen2 halamanENL GatewaycelsohernandoBelum ada peringkat
- Snteng 4 ADokumen2 halamanSnteng 4 ARolando Edgar Pairumani MedranoBelum ada peringkat
- GV 440 VPS - NicDokumen168 halamanGV 440 VPS - NictecnicomicroBelum ada peringkat
- Alameda Creek Trail MapDokumen1 halamanAlameda Creek Trail MapjubidownBelum ada peringkat
- Model Sim UserDokumen412 halamanModel Sim UserjubidownBelum ada peringkat
- Shanti Pavan TutorialDokumen226 halamanShanti Pavan TutorialjubidownBelum ada peringkat
- ADC e DAC GlossaryDokumen13 halamanADC e DAC GlossarygecoBelum ada peringkat
- All Digital PLL For RF Transmitter: Liangge Xu, Jukka-Pekka Pöyhtäri, Saska LindforsDokumen27 halamanAll Digital PLL For RF Transmitter: Liangge Xu, Jukka-Pekka Pöyhtäri, Saska Lindforsjubidown100% (2)
- Laws of Cricket PDFDokumen115 halamanLaws of Cricket PDFMohamed SultanBelum ada peringkat
- Match No Time Teams Umpires Scorer: Aggie Cricket ClubDokumen1 halamanMatch No Time Teams Umpires Scorer: Aggie Cricket ClubjubidownBelum ada peringkat
- Basic ThesisDokumen140 halamanBasic ThesisjubidownBelum ada peringkat
- Functional Self-Test of DSP Cores in A SOC: Master of Science ThesisDokumen101 halamanFunctional Self-Test of DSP Cores in A SOC: Master of Science ThesisjubidownBelum ada peringkat
- Time Behavioral Model For Phase-Domain ADPLL Based Frequency SynthesizerDokumen4 halamanTime Behavioral Model For Phase-Domain ADPLL Based Frequency SynthesizerjubidownBelum ada peringkat
- Low Jitter Adpll Based Clock Generator For High Speed Soc ApplicationsDokumen5 halamanLow Jitter Adpll Based Clock Generator For High Speed Soc ApplicationsjubidownBelum ada peringkat
- A Frequency Estimation Algorithm For Adpll Designs With Two-Cycle Lock-In TimeDokumen4 halamanA Frequency Estimation Algorithm For Adpll Designs With Two-Cycle Lock-In Timejubidown100% (1)
- Time Behavioral Model For Phase-Domain ADPLL Based Frequency SynthesizerDokumen4 halamanTime Behavioral Model For Phase-Domain ADPLL Based Frequency SynthesizerjubidownBelum ada peringkat
- Design and Analysis of Adaptive-Bandwidth All-Digital Phase-Locked LoopDokumen4 halamanDesign and Analysis of Adaptive-Bandwidth All-Digital Phase-Locked LoopjubidownBelum ada peringkat
- QA Questions and Answers GuideDokumen41 halamanQA Questions and Answers GuideSanchitBelum ada peringkat
- Programming - Test PDFDokumen4 halamanProgramming - Test PDFLogaa UthyasuriyanBelum ada peringkat
- MAXIMUS V GENE - Motherboards - ASUS USADokumen6 halamanMAXIMUS V GENE - Motherboards - ASUS USASmetell MinecraftBelum ada peringkat
- CDN Guide: How Content Delivery Networks WorkDokumen56 halamanCDN Guide: How Content Delivery Networks WorkUmer IqbalBelum ada peringkat
- Lpg/flammable Gas Leakage DetectorDokumen41 halamanLpg/flammable Gas Leakage DetectorAkash Zad100% (1)
- Smartplant ElectricalDokumen1 halamanSmartplant ElectricalGEETHA PUSHKARANBelum ada peringkat
- PowerMill 10 sp5Dokumen4 halamanPowerMill 10 sp5Bruno SiqueiraBelum ada peringkat
- Java Packages, Parsing & Exception HandlingDokumen26 halamanJava Packages, Parsing & Exception HandlingBonjovie FaustoBelum ada peringkat
- Daanbantayan ICT Office StructureDokumen8 halamanDaanbantayan ICT Office Structurelynx3007Belum ada peringkat
- Yonatan Andreas Parsaoran Lumban Tobing - ResumeDokumen2 halamanYonatan Andreas Parsaoran Lumban Tobing - ResumeChrisma Lumban TobingBelum ada peringkat
- Mf1S70Yyx/V1: 1. General DescriptionDokumen41 halamanMf1S70Yyx/V1: 1. General DescriptionPintér SándorBelum ada peringkat
- PQ Test Protocol MPA Sphere 20231211 212421Dokumen5 halamanPQ Test Protocol MPA Sphere 20231211 212421Ali RizviBelum ada peringkat
- AC Servo Spindle System User ManualDokumen51 halamanAC Servo Spindle System User Manualamit sutarBelum ada peringkat
- Agent Autoupdate FeatureDokumen5 halamanAgent Autoupdate FeaturehusseinBelum ada peringkat
- Sonicos 7 0 0 0 Rules and PoliciesDokumen138 halamanSonicos 7 0 0 0 Rules and PoliciesIT DepartmentBelum ada peringkat
- 34 Samss 621Dokumen14 halaman34 Samss 621Moustafa BayoumiBelum ada peringkat
- MGW Hardware UnitsDokumen14 halamanMGW Hardware Unitssubin4bslBelum ada peringkat
- Ssc-Je-Electronic-Devices Electrical EngineeringDokumen13 halamanSsc-Je-Electronic-Devices Electrical EngineeringPeerzada WahidBelum ada peringkat
- DB2 PM Usage Guide UpdateDokumen232 halamanDB2 PM Usage Guide Updategborja8881331Belum ada peringkat
- System Analysis and Design Chapter 1Dokumen45 halamanSystem Analysis and Design Chapter 1Randy Lamarca Alabab100% (1)
- Hikvision IVMS 4200 PC User ManualDokumen291 halamanHikvision IVMS 4200 PC User ManualMaxim 10Belum ada peringkat
- Information Communication Technology: Answer All QuestionsDokumen5 halamanInformation Communication Technology: Answer All QuestionsRishanRulzBelum ada peringkat
- A1750496823 - 28897 - 26 - 2023 - Zero Lecture - CSE111 (Updated) PPTDokumen22 halamanA1750496823 - 28897 - 26 - 2023 - Zero Lecture - CSE111 (Updated) PPTFareez Raza (Captain)Belum ada peringkat
- C#Dokumen2 halamanC#Gunturu LavanyaBelum ada peringkat
- FALLSEM2017-18 ECE5719 TH TT726 VL2017181006661 Reference Material I Detailed and Channel RoutingDokumen69 halamanFALLSEM2017-18 ECE5719 TH TT726 VL2017181006661 Reference Material I Detailed and Channel RoutingAishwarya a nairBelum ada peringkat
- Dip Lab Short Code-1Dokumen7 halamanDip Lab Short Code-1SANIYYA AAFREENBelum ada peringkat
- Asus M5a99fx Pro R2.0 Desktop Motherboard M5A99FX PRO R2Dokumen178 halamanAsus M5a99fx Pro R2.0 Desktop Motherboard M5A99FX PRO R2luis david millan mottaBelum ada peringkat
- HP Z6 G4 Workstation HP Z6 G4 Workstation: A Future-Proof PowerhouseDokumen4 halamanHP Z6 G4 Workstation HP Z6 G4 Workstation: A Future-Proof PowerhouseReeta DuttaBelum ada peringkat
- LISKREFDokumen202 halamanLISKREFAnyak2014100% (1)