Anda mungkin juga menyukai
- MOS Integrated Circuit DesignDari EverandMOS Integrated Circuit DesignE. WolfendaleBelum ada peringkat
- VLSI Interview QuestionsDokumen41 halamanVLSI Interview QuestionsKarthik Real Pacifier0% (1)
- Cmos Mixed Signal Design Part 1Dokumen62 halamanCmos Mixed Signal Design Part 1NikitaPrabhuBelum ada peringkat
- Emerging Trends in VLSI Design: A Big Question..???Dokumen102 halamanEmerging Trends in VLSI Design: A Big Question..???Madan R HonnalagereBelum ada peringkat
- VLSI TrendsDokumen18 halamanVLSI TrendsShibendu BhowmickBelum ada peringkat
- ARM ArchitectureDokumen6 halamanARM ArchitectureCarlos AraujoBelum ada peringkat
- Computer System Design: System-on-ChipDari EverandComputer System Design: System-on-ChipPenilaian: 2 dari 5 bintang2/5 (1)
- Latches&FlipflopsDokumen20 halamanLatches&FlipflopsAjay G Bellam100% (1)
- Optoelectronic Detectors: OutlineDokumen54 halamanOptoelectronic Detectors: OutlineShivam TiwariBelum ada peringkat
- Lesson8 CMOS GatesDokumen33 halamanLesson8 CMOS GatestienchuanBelum ada peringkat
- Io PadsDokumen5 halamanIo PadsKislay AnandBelum ada peringkat
- Vector-Based Peak Current Analysis During Wafer Test of Flip-Chip DesignsDokumen206 halamanVector-Based Peak Current Analysis During Wafer Test of Flip-Chip DesignsLakshman YandapalliBelum ada peringkat
- Timing Aware Dummy Metal Fill MethodologyDokumen3 halamanTiming Aware Dummy Metal Fill MethodologyraveneyesdeadBelum ada peringkat
- Understanding The UPF Power Domain and Domain Boundary - Mentor GraphicsDokumen15 halamanUnderstanding The UPF Power Domain and Domain Boundary - Mentor GraphicsmanojkumarBelum ada peringkat
- Vlsi DesignDokumen31 halamanVlsi Designajas777BBelum ada peringkat
- Clock Distribution: Rajeev MurgaiDokumen26 halamanClock Distribution: Rajeev MurgaiDmitry LeyzerovichBelum ada peringkat
- Ee 215 ADokumen8 halamanEe 215 AArjun Singhal100% (1)
- Ir Drop & Electromigration: Presented by Abdul NaeemDokumen14 halamanIr Drop & Electromigration: Presented by Abdul NaeemNoorul IslamBelum ada peringkat
- An Efficient RDL Routing For Flip Chip DesignsDokumen10 halamanAn Efficient RDL Routing For Flip Chip DesignsAparna TiwariBelum ada peringkat
- Setup With OCVxtalkDokumen10 halamanSetup With OCVxtalkNeha ZanjadBelum ada peringkat
- QA - Copy - Copy2Dokumen12 halamanQA - Copy - Copy2Physical DesignBelum ada peringkat
- Single-Mask Double-Patterning Lithography: Rani S. Ghaida, George Torres, and Puneet GuptaDokumen21 halamanSingle-Mask Double-Patterning Lithography: Rani S. Ghaida, George Torres, and Puneet GuptaRenju TjBelum ada peringkat
- VLSI Interview Questions and AnswersDokumen5 halamanVLSI Interview Questions and AnswersMahesh S GourBelum ada peringkat
- Understanding The Basics of Setup and Hold Time - EDNDokumen8 halamanUnderstanding The Basics of Setup and Hold Time - EDNNaveen SilveriBelum ada peringkat
- Vlsi Mitra DefinitionsDokumen5 halamanVlsi Mitra DefinitionsVamsi Krishna100% (1)
- VLSI Physical Design - Physical Design Interview Question Part 2Dokumen2 halamanVLSI Physical Design - Physical Design Interview Question Part 2srinathBelum ada peringkat
- Synthesis QuestionsDokumen4 halamanSynthesis QuestionsSupraja VedulaBelum ada peringkat
- VLSI Physical Design - STA Interview Question Part 3Dokumen2 halamanVLSI Physical Design - STA Interview Question Part 3srinathBelum ada peringkat
- Product How To Fully Utilize TSMC S 28HPC ProcessDokumen8 halamanProduct How To Fully Utilize TSMC S 28HPC ProcessvpsampathBelum ada peringkat
- SoC Timing ECO CycleDokumen2 halamanSoC Timing ECO CycleStudent100% (1)
- Signal and Design Integrity: Cadence Design Systems, IncDokumen56 halamanSignal and Design Integrity: Cadence Design Systems, IncJyothi Nath100% (1)
- VLSI TimingDokumen23 halamanVLSI TimingAhmed ZЗzЗBelum ada peringkat
- Interconnect Noise Optimization in Nanometer TechnologiesDokumen145 halamanInterconnect Noise Optimization in Nanometer TechnologiesSmile NagsBelum ada peringkat
- Placement Issues and Fixes - NishanthDokumen15 halamanPlacement Issues and Fixes - NishanthNishanth GowdaBelum ada peringkat
- Antenna Diode Vlsi Operation Positive ChargeDokumen21 halamanAntenna Diode Vlsi Operation Positive ChargeNegin HashemiBelum ada peringkat
- IO Design, ESDDokumen18 halamanIO Design, ESDashishmanyanBelum ada peringkat
- Basic Timing Constraints TutorialDokumen34 halamanBasic Timing Constraints Tutorialapi-3737190100% (3)
- Min Period Violation in Vlsi - Google Search PDFDokumen1 halamanMin Period Violation in Vlsi - Google Search PDFManjesh Gowda0% (1)
- VerilogDokumen18 halamanVerilogvortex2910_899547857Belum ada peringkat
- Ccs Power Char Guide 081216Dokumen35 halamanCcs Power Char Guide 081216刘振声Belum ada peringkat
- InterconnectDokumen32 halamanInterconnectLouisBelum ada peringkat
- Clock Issues in Deep Submircron DesignDokumen50 halamanClock Issues in Deep Submircron Designshilpi lavaniaBelum ada peringkat
- Migration in Solid State MaterialsDokumen15 halamanMigration in Solid State MaterialsNitin PatelBelum ada peringkat
- Optcts SetupDokumen29 halamanOptcts SetupsrajeceBelum ada peringkat
- PD FlowDokumen6 halamanPD FlowUTtBelum ada peringkat
- Low Power Techniques For VLSI DesignDokumen6 halamanLow Power Techniques For VLSI DesignjainatinBelum ada peringkat
- SoC Design - A ReviewDokumen131 halamanSoC Design - A ReviewSambhav VermanBelum ada peringkat
- Network Theory Formula Notesdoc 17Dokumen24 halamanNetwork Theory Formula Notesdoc 17Manish KushwahaBelum ada peringkat
- Dynamic Voltage DropDokumen7 halamanDynamic Voltage DropBaluvu JagadishBelum ada peringkat
- Flip FlopsDokumen25 halamanFlip FlopsNagul MeeraBelum ada peringkat
- PrimeTime 2011 Webinar-Advanced OCVDokumen32 halamanPrimeTime 2011 Webinar-Advanced OCVSourabh Aditya SwarnkarBelum ada peringkat
- Built in Logic Block Observer (BILBO)Dokumen14 halamanBuilt in Logic Block Observer (BILBO)Mr Predator100% (5)
- DFF Setup Hold ReviewDokumen50 halamanDFF Setup Hold ReviewAkanksha221291Belum ada peringkat
- Timing in Digital Circuits - NotesDokumen9 halamanTiming in Digital Circuits - NotesKowshick GuruBelum ada peringkat
- 28Nm and Below, New Path and Beyond: Danny Rittman PHDDokumen15 halaman28Nm and Below, New Path and Beyond: Danny Rittman PHDAbhesh Kumar TripathiBelum ada peringkat
- Digital Design FlowDokumen71 halamanDigital Design FlowSanjuBelum ada peringkat
- Ebook - Electronics Explained - Transistor CircuitsDokumen11 halamanEbook - Electronics Explained - Transistor CircuitsDhuvi LuvioBelum ada peringkat
- On The Investigation of Cascode Power Amplifiers For 5G ApplicationsDokumen4 halamanOn The Investigation of Cascode Power Amplifiers For 5G ApplicationssaidBelum ada peringkat
- Paper OTADokumen6 halamanPaper OTAFelipe MancillaBelum ada peringkat
- Automatic Power Factor Detection and CorDokumen53 halamanAutomatic Power Factor Detection and CorAshritaBelum ada peringkat
- 2 - EE - Intro - Electronics Pg. 28-41 Op Amp-Merged PDFDokumen402 halaman2 - EE - Intro - Electronics Pg. 28-41 Op Amp-Merged PDFAdelin IonutBelum ada peringkat
- DatasheetDokumen4 halamanDatasheetselocaBelum ada peringkat
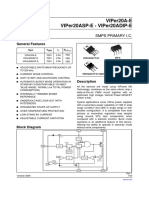
- Viper20A-E Viper20Asp-E - Viper20Adip-E: General FeaturesDokumen33 halamanViper20A-E Viper20Asp-E - Viper20Adip-E: General FeaturesAdriánBelum ada peringkat
- Mixer Design Methodology: Vishal SaxenaDokumen34 halamanMixer Design Methodology: Vishal SaxenaPhượng HồngBelum ada peringkat
- EDC - Unit 4 FinalDokumen140 halamanEDC - Unit 4 FinalDr Umapathy100% (1)
- Lab 10Dokumen7 halamanLab 10Joseph Joemeyer MeyerBelum ada peringkat
- Viper 20Dokumen22 halamanViper 20promatis5746Belum ada peringkat
- P6NC60FPDokumen10 halamanP6NC60FPJose Angel TorrealbaBelum ada peringkat
- Max17126 Max17126a PDFDokumen34 halamanMax17126 Max17126a PDFVukica IvicBelum ada peringkat
- 2SK4004 01MRDokumen18 halaman2SK4004 01MRcclodoaldo1577Belum ada peringkat
- 08 N 80Dokumen13 halaman08 N 80Ariel NavarreteBelum ada peringkat
- Circuit Note: Dual-Channel Colorimeter With Programmable Gain Transimpedance Amplifiers and Digital Synchronous DetectionDokumen8 halamanCircuit Note: Dual-Channel Colorimeter With Programmable Gain Transimpedance Amplifiers and Digital Synchronous DetectionfengheBelum ada peringkat
- 18EEL58 - Power Electronics Lab NewDokumen19 halaman18EEL58 - Power Electronics Lab NewSrinivasBelum ada peringkat
- B 115 BDokumen121 halamanB 115 BPetrica Dan DinuBelum ada peringkat
- A 1.5-V, 1.5-GHz CMOS Low Noise AmplifierDokumen15 halamanA 1.5-V, 1.5-GHz CMOS Low Noise AmplifierMohammad MousavikBelum ada peringkat
- Descriptio Features: Lt1956/Lt1956-5 High Voltage, 1.5A, 500Khz Step-Down Switching RegulatorsDokumen28 halamanDescriptio Features: Lt1956/Lt1956-5 High Voltage, 1.5A, 500Khz Step-Down Switching RegulatorsJensen WongBelum ada peringkat
- A Low Phase Noise Tri-Band LO Generation For Ku and E Band Radios For Backhauling Point-to-Point ApplicationsDokumen4 halamanA Low Phase Noise Tri-Band LO Generation For Ku and E Band Radios For Backhauling Point-to-Point ApplicationsrinsonBelum ada peringkat
- J10 Enhanced CascodeDokumen10 halamanJ10 Enhanced CascodeАлексей ГрабкоBelum ada peringkat
- A Capacitor-Free CMOS Low-Dropout Regulator With Damping-Factor-Control Frequency CompensationDokumen12 halamanA Capacitor-Free CMOS Low-Dropout Regulator With Damping-Factor-Control Frequency Compensationtotoya38Belum ada peringkat
- 1513EDokumen28 halaman1513EMukesh ThakkarBelum ada peringkat
- 10 GyratorDokumen14 halaman10 GyratorPako AlbBelum ada peringkat
- Tps54232 2-A, 28-V, 1-Mhz, Step-Down DC-DC Converter With Eco-Mode™Dokumen34 halamanTps54232 2-A, 28-V, 1-Mhz, Step-Down DC-DC Converter With Eco-Mode™Rigoberto Martinez LopezBelum ada peringkat
- 2N4416-Hifrequency Amp JFETDokumen2 halaman2N4416-Hifrequency Amp JFETsandhantusharBelum ada peringkat
- High-Gain Differential Amplifier DesignDokumen21 halamanHigh-Gain Differential Amplifier DesignBodhayan PrasadBelum ada peringkat
- Continuous-Time OTA-C Filters: Advantages: OTA-C Filters Have The Advantages of High Frequency or Wide BandwidthDokumen12 halamanContinuous-Time OTA-C Filters: Advantages: OTA-C Filters Have The Advantages of High Frequency or Wide BandwidthAshraf DeenBelum ada peringkat
- LT3469 Piezo Actuator Driver PDFDokumen8 halamanLT3469 Piezo Actuator Driver PDFjacerosiete2952Belum ada peringkat
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindDari EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindBelum ada peringkat
- The Fabric of Civilization: How Textiles Made the WorldDari EverandThe Fabric of Civilization: How Textiles Made the WorldPenilaian: 4.5 dari 5 bintang4.5/5 (58)
- Highest Duty: My Search for What Really MattersDari EverandHighest Duty: My Search for What Really MattersBelum ada peringkat
- Hero Found: The Greatest POW Escape of the Vietnam WarDari EverandHero Found: The Greatest POW Escape of the Vietnam WarPenilaian: 4 dari 5 bintang4/5 (19)
- Sully: The Untold Story Behind the Miracle on the HudsonDari EverandSully: The Untold Story Behind the Miracle on the HudsonPenilaian: 4 dari 5 bintang4/5 (103)
- The End of Craving: Recovering the Lost Wisdom of Eating WellDari EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellPenilaian: 4.5 dari 5 bintang4.5/5 (81)
- System Error: Where Big Tech Went Wrong and How We Can RebootDari EverandSystem Error: Where Big Tech Went Wrong and How We Can RebootBelum ada peringkat
- Transformed: Moving to the Product Operating ModelDari EverandTransformed: Moving to the Product Operating ModelPenilaian: 4 dari 5 bintang4/5 (1)
- Reality+: Virtual Worlds and the Problems of PhilosophyDari EverandReality+: Virtual Worlds and the Problems of PhilosophyPenilaian: 4 dari 5 bintang4/5 (24)
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestDari EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestPenilaian: 4 dari 5 bintang4/5 (28)
- Pale Blue Dot: A Vision of the Human Future in SpaceDari EverandPale Blue Dot: A Vision of the Human Future in SpacePenilaian: 4.5 dari 5 bintang4.5/5 (588)
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyDari EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyBelum ada peringkat
- Packing for Mars: The Curious Science of Life in the VoidDari EverandPacking for Mars: The Curious Science of Life in the VoidPenilaian: 4 dari 5 bintang4/5 (1395)
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaDari EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaBelum ada peringkat
- How to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerDari EverandHow to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerPenilaian: 4.5 dari 5 bintang4.5/5 (54)
- A Place of My Own: The Architecture of DaydreamsDari EverandA Place of My Own: The Architecture of DaydreamsPenilaian: 4 dari 5 bintang4/5 (242)
- Grunt: The Curious Science of Humans at WarDari EverandGrunt: The Curious Science of Humans at WarPenilaian: 4 dari 5 bintang4/5 (430)
- Fire on the Horizon: The Untold Story of the Gulf Oil DisasterDari EverandFire on the Horizon: The Untold Story of the Gulf Oil DisasterBelum ada peringkat
- The Future of Geography: How the Competition in Space Will Change Our WorldDari EverandThe Future of Geography: How the Competition in Space Will Change Our WorldPenilaian: 4 dari 5 bintang4/5 (5)
- How to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerDari EverandHow to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerPenilaian: 4.5 dari 5 bintang4.5/5 (122)
- The Weather Machine: A Journey Inside the ForecastDari EverandThe Weather Machine: A Journey Inside the ForecastPenilaian: 3.5 dari 5 bintang3.5/5 (31)
- Broken Money: Why Our Financial System is Failing Us and How We Can Make it BetterDari EverandBroken Money: Why Our Financial System is Failing Us and How We Can Make it BetterPenilaian: 5 dari 5 bintang5/5 (3)
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda CansDari EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda CansBelum ada peringkat
- Dirt to Soil: One Family’s Journey into Regenerative AgricultureDari EverandDirt to Soil: One Family’s Journey into Regenerative AgriculturePenilaian: 5 dari 5 bintang5/5 (125)
- The Technology Trap: Capital, Labor, and Power in the Age of AutomationDari EverandThe Technology Trap: Capital, Labor, and Power in the Age of AutomationPenilaian: 4.5 dari 5 bintang4.5/5 (46)
- Data-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseDari EverandData-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElsePenilaian: 3.5 dari 5 bintang3.5/5 (12)