Anda mungkin juga menyukai
- ISO.4302 - Is.14467.1997Dokumen12 halamanISO.4302 - Is.14467.1997tiele_barcelosBelum ada peringkat
- Weather Criterion - 2008 IS CodeDokumen5 halamanWeather Criterion - 2008 IS CodeRakha DhaniwijayaBelum ada peringkat
- Determination of Characteristics of NACA 0012 Airfoil - DocumentDokumen18 halamanDetermination of Characteristics of NACA 0012 Airfoil - Documentsouliemana ibnou ahmedBelum ada peringkat
- Draft Format Use or Cite: Chapter 31 Wind Tunnel ProcedureDokumen7 halamanDraft Format Use or Cite: Chapter 31 Wind Tunnel ProceduresharethefilesBelum ada peringkat
- Api RP 2a C3.4.3Dokumen5 halamanApi RP 2a C3.4.3Rustam Riyadi100% (1)
- 5.1 Airway Resistance - IntroductionDokumen11 halaman5.1 Airway Resistance - IntroductionDeepakKattimaniBelum ada peringkat
- Drag and vibration of port cranesDokumen10 halamanDrag and vibration of port cranesNicolás MaggiBelum ada peringkat
- 2019 - Chapter 31F Marine Oil Terminals 24Dokumen1 halaman2019 - Chapter 31F Marine Oil Terminals 24sidhappy86Belum ada peringkat
- 44.question Bank-Mee322Dokumen17 halaman44.question Bank-Mee322Prashant AwasthiBelum ada peringkat
- Section 2 I S: 1 General 2 Design CriteriaDokumen6 halamanSection 2 I S: 1 General 2 Design Criteriasara_grBelum ada peringkat
- A Numerical Investigation of Air Lubrication EffectDokumen8 halamanA Numerical Investigation of Air Lubrication EffectnaufragatoBelum ada peringkat
- CFD Analysis of Bubbly Flow Around Ship with Air Lubrication SystemDokumen5 halamanCFD Analysis of Bubbly Flow Around Ship with Air Lubrication SystemnavalntuaBelum ada peringkat
- Aerodynamic Characteristics of Naca 0012 Airfoil by CFD AnalysisDokumen8 halamanAerodynamic Characteristics of Naca 0012 Airfoil by CFD AnalysisNetherlands PressBelum ada peringkat
- 14000 TEU container ship benchmark dataDokumen15 halaman14000 TEU container ship benchmark dataChahbi RamziBelum ada peringkat
- AE 331 Lab Manual PDFDokumen22 halamanAE 331 Lab Manual PDFanimeshkumarverma0% (1)
- Wig Airfoil GeometryDokumen27 halamanWig Airfoil Geometrykats2404Belum ada peringkat
- The Four Important Factors For A ShipDokumen7 halamanThe Four Important Factors For A ShipMarian LazarBelum ada peringkat
- Draft Use or Cite: Chapter 31 Wind Tunnel ProcedureDokumen6 halamanDraft Use or Cite: Chapter 31 Wind Tunnel ProceduresharethefilesBelum ada peringkat
- Aerodynamic Characteristics of Naca 0012 Airfoil by CFD AnalysisDokumen8 halamanAerodynamic Characteristics of Naca 0012 Airfoil by CFD AnalysisŞevki SağlamBelum ada peringkat
- CAP 683 - The Assessment of Runaway Surface Friction For Maintenance PurposeDokumen13 halamanCAP 683 - The Assessment of Runaway Surface Friction For Maintenance PurposeKelvinBelum ada peringkat
- The Formulation of An Influence-Coefficient Method For Determining Application To Static Aeroelasfic Effects, and Its A Slender Aircraft in Symmetric Flight at M 2°2Dokumen52 halamanThe Formulation of An Influence-Coefficient Method For Determining Application To Static Aeroelasfic Effects, and Its A Slender Aircraft in Symmetric Flight at M 2°2abadittadesseBelum ada peringkat
- The Assessment of Runway Surface Friction CharacteristicsDokumen26 halamanThe Assessment of Runway Surface Friction CharacteristicssmaneemoolBelum ada peringkat
- Narathepp,+255612190825 - 53 Js Crma P 127 135Dokumen9 halamanNarathepp,+255612190825 - 53 Js Crma P 127 135Zaya TunBelum ada peringkat
- 10 Pressure RedDokumen32 halaman10 Pressure Redkawa21Belum ada peringkat
- WMO8 Ed2008 PartI Ch5 Up2010 enDokumen15 halamanWMO8 Ed2008 PartI Ch5 Up2010 eneliovcr1977Belum ada peringkat
- Pra Sanjit Das 11Dokumen4 halamanPra Sanjit Das 11PruthvirajBelum ada peringkat
- Wind Loading Code for Building Design in ThailandDokumen8 halamanWind Loading Code for Building Design in ThailandvanmurthyBelum ada peringkat
- Mooring and Berthing AnalysisDokumen6 halamanMooring and Berthing AnalysisIgnatius Samraj67% (3)
- Wind Loading-Base Station Antennas White Paper TP - 103194Dokumen13 halamanWind Loading-Base Station Antennas White Paper TP - 103194Joshua BerryBelum ada peringkat
- Only / Underline Format: Chapter C31 Wind Tunnel ProcedureDokumen11 halamanOnly / Underline Format: Chapter C31 Wind Tunnel ProceduresharethefilesBelum ada peringkat
- Determine Aerodynamic Characteristics of FX63-137 Aerofoil Using Wind TunnelDokumen4 halamanDetermine Aerodynamic Characteristics of FX63-137 Aerofoil Using Wind TunnelMena MedhatBelum ada peringkat
- High-Speed Craft: Guide For Building and ClassingDokumen5 halamanHigh-Speed Craft: Guide For Building and ClassingAlessandra ChavesBelum ada peringkat
- Theory ManualDokumen117 halamanTheory Manualzy lBelum ada peringkat
- S27 Strength Requirements For Fore Deck Fittings and Equipment S27Dokumen7 halamanS27 Strength Requirements For Fore Deck Fittings and Equipment S27dsrfgBelum ada peringkat
- Bousman ERF00 PDFDokumen21 halamanBousman ERF00 PDFrahpooye313Belum ada peringkat
- Chapter3 Lecture 6 - 12 Drag PolarDokumen15 halamanChapter3 Lecture 6 - 12 Drag PolarChegrani AhmedBelum ada peringkat
- An Investigation Into Wing in Ground Effect Aerofoil GeometryDokumen27 halamanAn Investigation Into Wing in Ground Effect Aerofoil GeometryVyssion100% (1)
- Ship Resistance & Propulsion (Tutorial 1)Dokumen10 halamanShip Resistance & Propulsion (Tutorial 1)Zulkarnain MustafarBelum ada peringkat
- Aerodynamic Characteristics of Multi-Element Iced Airfoil - CFD SimulationDokumen10 halamanAerodynamic Characteristics of Multi-Element Iced Airfoil - CFD SimulationBrock McConnelBelum ada peringkat
- NPTEL Tranmission Tower Design Facotr - 220305 - 104039Dokumen70 halamanNPTEL Tranmission Tower Design Facotr - 220305 - 104039Dipanku GoswamiBelum ada peringkat
- Wind Loads On Marine StructuresDokumen11 halamanWind Loads On Marine StructuresAmine SlavousBelum ada peringkat
- Chapter 3 Lecture 6 20-12-2011Dokumen16 halamanChapter 3 Lecture 6 20-12-2011anon_964990466Belum ada peringkat
- MCAR Part 5 Section 5 Units of M 2013Dokumen21 halamanMCAR Part 5 Section 5 Units of M 2013WIN MINBelum ada peringkat
- Ship Launching & Upgrading Using Air BagsDokumen11 halamanShip Launching & Upgrading Using Air BagswildanBelum ada peringkat
- CFD Investigation of Airflow On A Model Radio Control Race CarDokumen5 halamanCFD Investigation of Airflow On A Model Radio Control Race CarAminBelum ada peringkat
- Timmer PaperAIAA20030352Dokumen11 halamanTimmer PaperAIAA20030352gerritgrootBelum ada peringkat
- Effective turbulence calculations using IEC 61400-1 Edition 3Dokumen0 halamanEffective turbulence calculations using IEC 61400-1 Edition 3lucioctsicilBelum ada peringkat
- Supercritical Airfoils With FluentDokumen10 halamanSupercritical Airfoils With FluentErnesto Padilla MarquezBelum ada peringkat
- Fundamental of Aerodynamic 5th EdDokumen14 halamanFundamental of Aerodynamic 5th EdabcBelum ada peringkat
- 7733 OostlanderDokumen97 halaman7733 Oostlanderpich222Belum ada peringkat
- Estimating Vertical Drag On Helicopter Fuselage During HoveringDokumen7 halamanEstimating Vertical Drag On Helicopter Fuselage During HoveringPeter IjaramendiBelum ada peringkat
- WIND CODE EVALUATION OF CUBADokumen7 halamanWIND CODE EVALUATION OF CUBAberto2008Belum ada peringkat
- Wind Loading-Base Station Antennas White Paper TP - 103194Dokumen13 halamanWind Loading-Base Station Antennas White Paper TP - 103194nakkipatty100% (2)
- Wind Tunnel TestDokumen32 halamanWind Tunnel TestAristo Onan100% (1)
- Aerodynamic characteristics of wind turbine blade airfoils at high anglesDokumen8 halamanAerodynamic characteristics of wind turbine blade airfoils at high anglesBharathi SankarBelum ada peringkat
- Wind Effects on Structures: Modern Structural Design for WindDari EverandWind Effects on Structures: Modern Structural Design for WindBelum ada peringkat
- Small Unmanned Fixed-wing Aircraft Design: A Practical ApproachDari EverandSmall Unmanned Fixed-wing Aircraft Design: A Practical ApproachBelum ada peringkat
- The Role of Aesthetics in Engineering Design - Insights Gained From Cross-Cultural Research Into Traditional Fishing Vessels in IndonesiaDokumen17 halamanThe Role of Aesthetics in Engineering Design - Insights Gained From Cross-Cultural Research Into Traditional Fishing Vessels in IndonesiaDavid AmachreeBelum ada peringkat
- Shtokman Development AG Technical Meeting Russian Valve ManufacturersDokumen26 halamanShtokman Development AG Technical Meeting Russian Valve ManufacturersDavid AmachreeBelum ada peringkat
- Anandonment - Jubilee Field EIA Chapter 8 23 - Nov09Dokumen0 halamanAnandonment - Jubilee Field EIA Chapter 8 23 - Nov09David AmachreeBelum ada peringkat
- BibliographyDokumen2 halamanBibliographyDavid AmachreeBelum ada peringkat
- Largest Churches in The World Are in NigeriaDokumen1 halamanLargest Churches in The World Are in NigeriaDavid AmachreeBelum ada peringkat
- How The US Overthrew Ghana's Kwame NkrumahDokumen5 halamanHow The US Overthrew Ghana's Kwame NkrumahDavid AmachreeBelum ada peringkat
- Annular PackoffDokumen1 halamanAnnular PackoffDavid AmachreeBelum ada peringkat
- How The US Overthrew Ghana's Kwame NkrumahDokumen5 halamanHow The US Overthrew Ghana's Kwame NkrumahDavid AmachreeBelum ada peringkat
- Analysis of A Beam in Pure BendingDokumen4 halamanAnalysis of A Beam in Pure BendingRasim ŠehagićBelum ada peringkat
- Ch02 ProblemsDokumen3 halamanCh02 ProblemsDavid AmachreeBelum ada peringkat
- Feedback Control of Simple and Multi-Input SystemsDokumen15 halamanFeedback Control of Simple and Multi-Input SystemsTahir FidanBelum ada peringkat
- How To's Reinstall Your Operating SysytemDokumen164 halamanHow To's Reinstall Your Operating Sysytemgator711Belum ada peringkat
- Basic Vibration AnalysisDokumen52 halamanBasic Vibration Analysisgpradipta100% (3)
- Panasonic KX TG8522Dokumen2 halamanPanasonic KX TG8522David AmachreeBelum ada peringkat
- Dake's Unorthodox ChristologyDokumen29 halamanDake's Unorthodox ChristologyDavid Amachree40% (5)
- Presentation Overhung FansDokumen104 halamanPresentation Overhung FansKarthik Vk100% (1)
- Workover and Well Servicing CompaniesDokumen74 halamanWorkover and Well Servicing CompaniesDavid AmachreeBelum ada peringkat
- Lagrange 44Dokumen2 halamanLagrange 44David AmachreeBelum ada peringkat
- Free Vibration of ParticlesDokumen19 halamanFree Vibration of ParticlesDavid AmachreeBelum ada peringkat
- Workover and Well Servicing CompaniesDokumen74 halamanWorkover and Well Servicing CompaniesDavid AmachreeBelum ada peringkat
- Well Abandonment and Decommissioing - Current IssuesDokumen4 halamanWell Abandonment and Decommissioing - Current IssuesDavid AmachreeBelum ada peringkat
- Bearing Design in MachineryDokumen640 halamanBearing Design in MachineryDavid Amachree100% (1)
- Derive Lagrange CalculusDokumen4 halamanDerive Lagrange CalculusDavid AmachreeBelum ada peringkat
- Lagrange 111Dokumen8 halamanLagrange 111David AmachreeBelum ada peringkat
- Dake's Unorthodox ChristologyDokumen29 halamanDake's Unorthodox ChristologyDavid Amachree40% (5)
- Lagrange 111Dokumen8 halamanLagrange 111David AmachreeBelum ada peringkat
- Pumps CorrosionDokumen14 halamanPumps Corrosionapi-3740417100% (2)
- Pumps CorrosionDokumen14 halamanPumps Corrosionapi-3740417100% (2)
- Cargoes Chapter4Dokumen8 halamanCargoes Chapter4matmaricBelum ada peringkat
- 2006 03 01-SeabasingDokumen329 halaman2006 03 01-SeabasingsithusoemoeBelum ada peringkat
- Keuning 2008 PDFDokumen9 halamanKeuning 2008 PDFmusebladeBelum ada peringkat
- F, N U N N N NN: T T T T T T T T TRDokumen1 halamanF, N U N N N NN: T T T T T T T T TRAbu Syeed Md. Aurangzeb Al MasumBelum ada peringkat
- Battle of Soutwold Bay 1672Dokumen5 halamanBattle of Soutwold Bay 1672samuraijack7Belum ada peringkat
- What Is Industrial Insurance Coverage? Industrial Insurance, Also Known As Workers' Compensation, Provides Medical and Non-Medical BenefitsDokumen14 halamanWhat Is Industrial Insurance Coverage? Industrial Insurance, Also Known As Workers' Compensation, Provides Medical and Non-Medical BenefitsJenny Marie B. AlapanBelum ada peringkat
- Digitalization in Shipping in Lieu of Upcoming IMO DCSDokumen61 halamanDigitalization in Shipping in Lieu of Upcoming IMO DCSSohan MishraBelum ada peringkat
- Aht Attendance ReportDokumen42 halamanAht Attendance Reportiskalkos100% (1)
- Mastrep GuideDokumen4 halamanMastrep Guidecongviectest congviectestBelum ada peringkat
- UK Masters OralsDokumen74 halamanUK Masters OralsRaphael Belano Briones100% (2)
- Ship General Safety Document TitleDokumen2 halamanShip General Safety Document TitleJarosławWierzganowskiBelum ada peringkat
- Oakland Port Mari MapDokumen1 halamanOakland Port Mari MapfranssvlBelum ada peringkat
- DRT ExamplesDokumen4 halamanDRT Examplesandreea_zgrBelum ada peringkat
- Gulf of AdenDokumen6 halamanGulf of AdenKarl GustavBelum ada peringkat
- Thesis - Nigeria's Shipbuilding CapabilityDokumen250 halamanThesis - Nigeria's Shipbuilding Capabilityknowme73Belum ada peringkat
- Elearning Chapter 2 Chartering RVDokumen67 halamanElearning Chapter 2 Chartering RVDương Thị Kim HiềnBelum ada peringkat
- Fleet-List UHL 2021-02-15 V2.2Dokumen1 halamanFleet-List UHL 2021-02-15 V2.2Bert Soriano0% (1)
- Agreement for Two WorkboatsDokumen7 halamanAgreement for Two WorkboatsAamir SirohiBelum ada peringkat
- Curriculum VitaeDokumen2 halamanCurriculum VitaeMutuberloverBelum ada peringkat
- ts513 PDFDokumen6 halamants513 PDFMung Duong XuanBelum ada peringkat
- School of Maritime Studies Vels University Thalambur: Life Boat AIMDokumen2 halamanSchool of Maritime Studies Vels University Thalambur: Life Boat AIMAayush AgrawalBelum ada peringkat
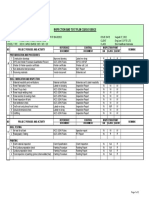
- Inspection and Test Plan for Cargo Barge Hull FabricationDokumen2 halamanInspection and Test Plan for Cargo Barge Hull FabricationferdyBelum ada peringkat
- Instant Download Law and Business Administration in Canada Canadian 14th Edition Smyth Test Bank PDF Full ChapterDokumen33 halamanInstant Download Law and Business Administration in Canada Canadian 14th Edition Smyth Test Bank PDF Full ChapterJessicaMathewscoyq100% (8)
- MaritimeReporter 2004 11Dokumen116 halamanMaritimeReporter 2004 11Trang NguyenBelum ada peringkat
- La Renommee Booklet: Story of A French FrigateDokumen30 halamanLa Renommee Booklet: Story of A French FrigateDavid StockmanBelum ada peringkat
- Training in HSLDokumen18 halamanTraining in HSLG Sri SoumyaBelum ada peringkat
- First Voyage SummaryDokumen6 halamanFirst Voyage SummaryTrisha Anne Aranzaso BautistaBelum ada peringkat
- VTMS SystemDokumen20 halamanVTMS Systeminder100% (1)
- Antonia Napier - Governor's DaughterDokumen5 halamanAntonia Napier - Governor's DaughterJocelyn PutnamBelum ada peringkat
- BCA Registration CWDokumen4 halamanBCA Registration CWtatonyBelum ada peringkat