Anda mungkin juga menyukai
- Elt-43007 Digital Communications: 1 System Model and Generation of Bit Sequence and Qam SymbolsDokumen8 halamanElt-43007 Digital Communications: 1 System Model and Generation of Bit Sequence and Qam SymbolsIvancica RamljakBelum ada peringkat
- Optimum Array Processing: Part IV of Detection, Estimation, and Modulation TheoryDari EverandOptimum Array Processing: Part IV of Detection, Estimation, and Modulation TheoryBelum ada peringkat
- Baseband M-Ary Pam TransmissionDokumen21 halamanBaseband M-Ary Pam TransmissionAnonymous uspYoqE100% (1)
- Rake ReceiverDokumen48 halamanRake ReceiverIk Ram100% (1)
- Channel Estimation in MIMODokumen33 halamanChannel Estimation in MIMOMADHUR CHAUDHARYBelum ada peringkat
- Unit 5Dokumen47 halamanUnit 5menakadevieceBelum ada peringkat
- Pilot Optimization and Channel Estimation For Multiuser Massive MIMO SystemsDokumen6 halamanPilot Optimization and Channel Estimation For Multiuser Massive MIMO SystemsQuả Ớt Leo-neeBelum ada peringkat
- Fading SimulationDokumen45 halamanFading SimulationAtef Al-Kotafi Al-AbdiBelum ada peringkat
- Multiplexing - Theory and ConceptDokumen6 halamanMultiplexing - Theory and ConceptsolayanoBelum ada peringkat
- Wireless Communication: 1) Transmission ModesDokumen8 halamanWireless Communication: 1) Transmission ModesWasim WaseemBelum ada peringkat
- Chapter-1: 1.1. Wireless Communication SystemsDokumen28 halamanChapter-1: 1.1. Wireless Communication Systemskarthick_mariner92Belum ada peringkat
- Iterative Soft Decision Based Complex K-Best MIMO DecoderDokumen12 halamanIterative Soft Decision Based Complex K-Best MIMO DecoderAI Coordinator - CSC Journals100% (1)
- BER For BPSK in OFDM With Rayleigh Multipath ChannelDokumen6 halamanBER For BPSK in OFDM With Rayleigh Multipath ChannelNaveen Kumar ChadalavadaBelum ada peringkat
- Orthogonal Frequency Division Multiplexing (OFDM)Dokumen32 halamanOrthogonal Frequency Division Multiplexing (OFDM)jagadeesh jagadeBelum ada peringkat
- Adaptive Channel Estimation Technique in MIMO-OFDM System For Wireless Communication SystemDokumen4 halamanAdaptive Channel Estimation Technique in MIMO-OFDM System For Wireless Communication SystemIJRT OnlineBelum ada peringkat
- Computer Networks UNIT-2 Syllabus: Physical Layer - Fourier Analysis - Bandwidth Limited Signals - The MaximumDokumen39 halamanComputer Networks UNIT-2 Syllabus: Physical Layer - Fourier Analysis - Bandwidth Limited Signals - The MaximumRaju ImandiBelum ada peringkat
- Common Phase Error Due To Phase Noise in Ofdm - Estimation and SuppressionDokumen5 halamanCommon Phase Error Due To Phase Noise in Ofdm - Estimation and SuppressionemadhusBelum ada peringkat
- Lab11 - Data Communication in MatlabDokumen8 halamanLab11 - Data Communication in MatlabJavier Ruiz ThorrensBelum ada peringkat
- CM Kaltfl 080709Dokumen5 halamanCM Kaltfl 080709Võ Quy QuangBelum ada peringkat
- Lecture 04 - Signal Space Approach and Gram Schmidt ProcedureDokumen20 halamanLecture 04 - Signal Space Approach and Gram Schmidt ProcedureKhoa PhamBelum ada peringkat
- Equalization MotionDokumen10 halamanEqualization MotionMahmud JaafarBelum ada peringkat
- Rician Fading Channel Simulations: 6.1 Performance ObjectivesDokumen4 halamanRician Fading Channel Simulations: 6.1 Performance ObjectivesG Mustafa AbbasiBelum ada peringkat
- Improved Adaptive Bit Error Rate Performance For Fading Channel CommunicationDokumen10 halamanImproved Adaptive Bit Error Rate Performance For Fading Channel CommunicationInternational Journal of Application or Innovation in Engineering & ManagementBelum ada peringkat
- MIMO Channel Estimation Using The LS and MMSE Algorithm: Mohammed Ali Mohammed MOQBEL, Wangdong, Al-Marhabi Zaid AliDokumen10 halamanMIMO Channel Estimation Using The LS and MMSE Algorithm: Mohammed Ali Mohammed MOQBEL, Wangdong, Al-Marhabi Zaid AliKoustab MaityBelum ada peringkat
- Matlab Toolbox QuickrefDokumen11 halamanMatlab Toolbox QuickrefshervinshBelum ada peringkat
- Telecoms Systems-Answer Sheet-HarshaDokumen8 halamanTelecoms Systems-Answer Sheet-HarshaHarsha BandaraBelum ada peringkat
- A Conceptual Study of OFDM-based Multiple Access SchemesDokumen7 halamanA Conceptual Study of OFDM-based Multiple Access SchemeswoodksdBelum ada peringkat
- Probability AssignmentDokumen10 halamanProbability Assignmentrabya waheedBelum ada peringkat
- Channel Estimation EJSR 70-1-04Dokumen8 halamanChannel Estimation EJSR 70-1-04حاتم الشرڭيBelum ada peringkat
- Maximum Ratio Transmission: Titus K. Y. LoDokumen4 halamanMaximum Ratio Transmission: Titus K. Y. LoButtordBelum ada peringkat
- Geneti Algorithm Optimization Tool For Channel Estimation and Symbol Detection in Mimo-OFDM SystemsDokumen10 halamanGeneti Algorithm Optimization Tool For Channel Estimation and Symbol Detection in Mimo-OFDM SystemsjdnfjngsBelum ada peringkat
- Researchpaper OFDM Modulator For Wireless LAN WLAN StandardDokumen5 halamanResearchpaper OFDM Modulator For Wireless LAN WLAN Standardtsk4b7Belum ada peringkat
- UntitledDokumen184 halamanUntitledKathiravan ReddyBelum ada peringkat
- FBMC Primer - 06 2010 PDFDokumen31 halamanFBMC Primer - 06 2010 PDFakhilgargjprBelum ada peringkat
- A Performance Study of MIMO Detectors: Christoph Windpassinger, Lutz Lampe, Robert F. H. Fischer, Thorsten HehnDokumen16 halamanA Performance Study of MIMO Detectors: Christoph Windpassinger, Lutz Lampe, Robert F. H. Fischer, Thorsten HehnLe-Nam TranBelum ada peringkat
- OFDM Simulator Using MATLAB: International Journal of Emerging Technology and Advanced EngineeringDokumen4 halamanOFDM Simulator Using MATLAB: International Journal of Emerging Technology and Advanced Engineeringhungpm2013Belum ada peringkat
- 03 SoftwareDokumen4 halaman03 SoftwareKamal Cruz LeBelum ada peringkat
- Channel Estimation Algorithms For OFDM SystemsDokumen5 halamanChannel Estimation Algorithms For OFDM Systemsdearprasanta6015Belum ada peringkat
- Wireless PropagationDokumen20 halamanWireless Propagationsabuj22Belum ada peringkat
- Improving Channel Estimation Accuracy in OFDM System Using MATLAB SimulationDokumen3 halamanImproving Channel Estimation Accuracy in OFDM System Using MATLAB SimulationNitin Suyan PanchalBelum ada peringkat
- Receive Antenna Subset Selection For MIMO System - Matlab SimulationDokumen7 halamanReceive Antenna Subset Selection For MIMO System - Matlab SimulationMourad ZroudBelum ada peringkat
- Comparing Various Channel Estimation Techniques For Ofdm Systems Using MatlabDokumen13 halamanComparing Various Channel Estimation Techniques For Ofdm Systems Using MatlabJohn BergBelum ada peringkat
- Performance Analysis of V-Blast Based MIMO-OFDM System With Various Detection TechniquesDokumen4 halamanPerformance Analysis of V-Blast Based MIMO-OFDM System With Various Detection Techniqueszizo1921Belum ada peringkat
- Performance of Channel Estimation in OFDM System For Different PSK ModulationsDokumen6 halamanPerformance of Channel Estimation in OFDM System For Different PSK ModulationsliiBelum ada peringkat
- CSPII Lab InstructionsDokumen8 halamanCSPII Lab InstructionsSadiqur Rahaman SumonBelum ada peringkat
- Eigen Value Based (EBB) Beamforming Precoding Design For Downlink Capacity Improvement in Multiuser MIMO ChannelDokumen7 halamanEigen Value Based (EBB) Beamforming Precoding Design For Downlink Capacity Improvement in Multiuser MIMO ChannelKrishna Ram BudhathokiBelum ada peringkat
- Design and Implementation of OFDM Trans-Receiver For IEEE 802.11 (WLAN)Dokumen13 halamanDesign and Implementation of OFDM Trans-Receiver For IEEE 802.11 (WLAN)IJMERBelum ada peringkat
- A Novel Linear MMSE Detection Technique For MC-CDMADokumen4 halamanA Novel Linear MMSE Detection Technique For MC-CDMANitin Suyan PanchalBelum ada peringkat
- Performance Analysis of Multiuser MIMO Systems With Zero Forcing ReceiversDokumen5 halamanPerformance Analysis of Multiuser MIMO Systems With Zero Forcing ReceiversNetsanet JemalBelum ada peringkat
- Channel Multiplexing, Bandwidth, Data Rate and Capacity: Nikola ZlatanovDokumen8 halamanChannel Multiplexing, Bandwidth, Data Rate and Capacity: Nikola ZlatanovayadmanBelum ada peringkat
- LAN - Alamouti STBCDokumen6 halamanLAN - Alamouti STBCAi Lan CaoBelum ada peringkat
- Matlab For Dynamicm ChannelDokumen7 halamanMatlab For Dynamicm ChannelasokogeneBelum ada peringkat
- Joint Synchronization and Channel Estimation For MIMO-OFDM Systems Using EM AlgorithmDokumen8 halamanJoint Synchronization and Channel Estimation For MIMO-OFDM Systems Using EM AlgorithmInternational Journal of Application or Innovation in Engineering & ManagementBelum ada peringkat
- 007 - Bit Error RateDokumen21 halaman007 - Bit Error RateKos GayoBelum ada peringkat
- IJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchDokumen6 halamanIJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchInternational Journal of computational Engineering research (IJCER)Belum ada peringkat
- Chapter 12 - Modulation and Demodulation Techniques For Wireless Communication SystemsDokumen21 halamanChapter 12 - Modulation and Demodulation Techniques For Wireless Communication SystemsproteccionesBelum ada peringkat
- OFDM Simulation EE810Dokumen18 halamanOFDM Simulation EE810Ashique Mahmood100% (1)
- Multiple Access Techniques For Wireless CommunicationsDokumen67 halamanMultiple Access Techniques For Wireless CommunicationsVarsha JanardhananBelum ada peringkat
- Spread Spectrum and CDMA: Principles and ApplicationsDari EverandSpread Spectrum and CDMA: Principles and ApplicationsBelum ada peringkat
- 788 ManualDokumen16 halaman788 Manualn0rdBelum ada peringkat
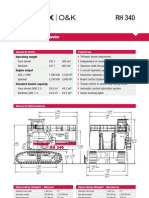
- Hydraulic Mining ExcavatorDokumen8 halamanHydraulic Mining Excavatorasditia_07100% (1)
- Syllabus PDFDokumen3 halamanSyllabus PDFBibin Raj B SBelum ada peringkat
- Marketing Channels: A Strategic Tool of Growing Importance For The Next MillenniumDokumen59 halamanMarketing Channels: A Strategic Tool of Growing Importance For The Next MillenniumAnonymous ibmeej9Belum ada peringkat
- Chapter 2Dokumen8 halamanChapter 2Fahmia MidtimbangBelum ada peringkat
- Importance of Communications 05sept2023Dokumen14 halamanImportance of Communications 05sept2023Sajib BhattacharyaBelum ada peringkat
- E-Versuri Ro - Rihana - UmbrelaDokumen2 halamanE-Versuri Ro - Rihana - Umbrelaanon-821253100% (1)
- Predator U7135 ManualDokumen36 halamanPredator U7135 Manualr17g100% (1)
- Account Statement 250820 240920 PDFDokumen2 halamanAccount Statement 250820 240920 PDFUnknown100% (1)
- Hand Out Fire SurpressDokumen69 halamanHand Out Fire SurpressSeptiawanWandaBelum ada peringkat
- EKRP311 Vc-Jun2022Dokumen3 halamanEKRP311 Vc-Jun2022dfmosesi78Belum ada peringkat
- Surgery - 2020 With CorrectionDokumen70 halamanSurgery - 2020 With CorrectionBaraa KassisBelum ada peringkat
- Resume 1Dokumen2 halamanResume 1Aidie HerreraBelum ada peringkat
- BLP#1 - Assessment of Community Initiative (3 Files Merged)Dokumen10 halamanBLP#1 - Assessment of Community Initiative (3 Files Merged)John Gladhimer CanlasBelum ada peringkat
- Open Letter To Hon. Nitin Gadkari On Pothole Problem On National and Other Highways in IndiaDokumen3 halamanOpen Letter To Hon. Nitin Gadkari On Pothole Problem On National and Other Highways in IndiaProf. Prithvi Singh KandhalBelum ada peringkat
- Random Variables Random Variables - A Random Variable Is A Process, Which When FollowedDokumen2 halamanRandom Variables Random Variables - A Random Variable Is A Process, Which When FollowedsdlfBelum ada peringkat
- To Find Fatty Material of Different Soap SamplesDokumen17 halamanTo Find Fatty Material of Different Soap SamplesRohan Singh0% (2)
- FpsecrashlogDokumen19 halamanFpsecrashlogtim lokBelum ada peringkat
- Siemens Rapidlab 248, 348, 840, 845, 850, 855, 860, 865: Reagents & ControlsDokumen2 halamanSiemens Rapidlab 248, 348, 840, 845, 850, 855, 860, 865: Reagents & ControlsJuan Carlos CrespoBelum ada peringkat
- 82686b - LOAD SHARING MODULEDokumen2 halaman82686b - LOAD SHARING MODULENguyễn Đình ĐứcBelum ada peringkat
- A Medium-Rise Residential Building: A B C E D F G HDokumen3 halamanA Medium-Rise Residential Building: A B C E D F G HBabyjhaneTanItmanBelum ada peringkat
- BARUDokumen53 halamanBARUhueuaBelum ada peringkat
- Moquerio - Defense Mechanism ActivityDokumen3 halamanMoquerio - Defense Mechanism ActivityRoxan MoquerioBelum ada peringkat
- General Chemistry 2 Q1 Lesson 5 Endothermic and Exotheric Reaction and Heating and Cooling CurveDokumen19 halamanGeneral Chemistry 2 Q1 Lesson 5 Endothermic and Exotheric Reaction and Heating and Cooling CurveJolo Allexice R. PinedaBelum ada peringkat
- Power Curbers, Inc. v. E. D. Etnyre & Co. and A. E. Finley & Associates, Inc., 298 F.2d 484, 4th Cir. (1962)Dokumen18 halamanPower Curbers, Inc. v. E. D. Etnyre & Co. and A. E. Finley & Associates, Inc., 298 F.2d 484, 4th Cir. (1962)Scribd Government DocsBelum ada peringkat
- Editan - Living English (CD Book)Dokumen92 halamanEditan - Living English (CD Book)M Luthfi Al QodryBelum ada peringkat
- ALE Manual For LaserScope Arc Lamp Power SupplyDokumen34 halamanALE Manual For LaserScope Arc Lamp Power SupplyKen DizzeruBelum ada peringkat
- Please Refer Tender Document and Annexures For More DetailsDokumen1 halamanPlease Refer Tender Document and Annexures For More DetailsNAYANMANI NAMASUDRABelum ada peringkat
- Bacacay South Hris1Dokumen7.327 halamanBacacay South Hris1Lito ObstaculoBelum ada peringkat
- Dwnload Full Beckers World of The Cell 9th Edition Hardin Solutions Manual PDFDokumen35 halamanDwnload Full Beckers World of The Cell 9th Edition Hardin Solutions Manual PDFgebbielean1237100% (12)