Anda mungkin juga menyukai
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Sewer Connection Application Guidance PDFDokumen7 halamanSewer Connection Application Guidance PDFSamuel FuentesBelum ada peringkat
- 1998-10 The Computer Paper - Ontario EditionDokumen156 halaman1998-10 The Computer Paper - Ontario Editionthecomputerpaper100% (1)
- The Difference Between The Internet and World Wide WebDokumen3 halamanThe Difference Between The Internet and World Wide WebSonal Jain100% (1)
- E 7016 Product-SheetDokumen1 halamanE 7016 Product-SheetAlireza TakrimiBelum ada peringkat
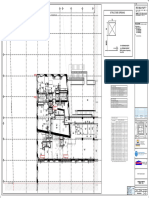
- 20105-AR-HOT-07-105-01 Rev 00Dokumen1 halaman20105-AR-HOT-07-105-01 Rev 00Bahaa MohamedBelum ada peringkat
- GM Passlock II SystemDokumen14 halamanGM Passlock II Systemalmia tronicsBelum ada peringkat
- Car DeerDokumen2 halamanCar DeerNEGameandParksBelum ada peringkat
- 500-600 Forklifts & Buckmaster: Parts CatalogDokumen281 halaman500-600 Forklifts & Buckmaster: Parts CatalogRoberto Mariano100% (2)
- Comfort and Performance Your Customers DemandDokumen18 halamanComfort and Performance Your Customers Demandgizex2013Belum ada peringkat
- Biomasse-HKW Sandreuth E NQDokumen8 halamanBiomasse-HKW Sandreuth E NQValeriu StanBelum ada peringkat
- 2013 11 DUPLEX EasyDokumen21 halaman2013 11 DUPLEX EasyAnonymous HC0tWeBelum ada peringkat
- PACSystemsRX3i CS GFA559G (2010)Dokumen4 halamanPACSystemsRX3i CS GFA559G (2010)Omar Alfredo Del CastilloBelum ada peringkat
- Optimizing Technique-Grenade Explosion MethodDokumen18 halamanOptimizing Technique-Grenade Explosion MethodUday Wankar100% (1)
- Electro Magnetic Induction PDFDokumen28 halamanElectro Magnetic Induction PDFPuran BistaBelum ada peringkat
- Internship Report May 2016Dokumen11 halamanInternship Report May 2016Rupini RagaviahBelum ada peringkat
- Advanced Cooling System - EMD00253ENDokumen4 halamanAdvanced Cooling System - EMD00253ENnarayanan_anoob0% (1)
- Bubbling Kun NiDokumen7 halamanBubbling Kun NiBelen CRBelum ada peringkat
- U042en PDFDokumen12 halamanU042en PDFTatiya TatiyasoponBelum ada peringkat
- ASTM F 412 - 01a Standard Terminology Relating To Plastic Piping Systems1Dokumen13 halamanASTM F 412 - 01a Standard Terminology Relating To Plastic Piping Systems1JORGE ARTURO TORIBIO HUERTABelum ada peringkat
- Using Dapper Asynchronously inDokumen1 halamanUsing Dapper Asynchronously inGiovani BrondaniBelum ada peringkat
- SdccmanDokumen126 halamanSdccmanGustavo A. Sarache MillanBelum ada peringkat
- Transmicion de CF 500, CF 600 PDFDokumen337 halamanTransmicion de CF 500, CF 600 PDFgusspeSBelum ada peringkat
- IRF350Dokumen7 halamanIRF350sanniviBelum ada peringkat
- Shifting Meterials: Ground Floor ReceptionDokumen3 halamanShifting Meterials: Ground Floor Receptionvishwas pandithBelum ada peringkat
- Cif Purge Plug Systems en 3Dokumen3 halamanCif Purge Plug Systems en 3abdeljalil elbadrBelum ada peringkat
- SinxbyxDokumen9 halamanSinxbyxGreeshmaBelum ada peringkat
- Tube Well Design Project SolutionDokumen5 halamanTube Well Design Project SolutionEng Ahmed abdilahi IsmailBelum ada peringkat
- Le22a1321 AocDokumen130 halamanLe22a1321 AocEchefisEchefisBelum ada peringkat
- GMP Male BearingDokumen3 halamanGMP Male BearingMahdi HajizadehBelum ada peringkat
- 1Dokumen100 halaman1Niomi GolraiBelum ada peringkat