Dynamics of Multibody Systems
Diunggah oleh
xxzoltanxxJudul Asli
Hak Cipta
Format Tersedia
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
Format Tersedia
Dynamics of Multibody Systems
Diunggah oleh
xxzoltanxxHak Cipta:
Format Tersedia
Dynamics of Multibody Systems
/modelling concepts and applications/
(INTERNAL VERSION)
M gen y + q v y, y, t ) q a gen
..
University of Zagreb F. Mech. Eng. Naval Arch.
University of Stuttgart Institute B of Mechanics
Zdravko Terze Albrecht Eiber
Foreword
Dynamics is a branch of mechanics that is concerned with the study of motion and the relation between forces and motion. The central focus of our study is dynamics of systems of rigid bodies and its application to engineering problems. Furthermore, we are basically concerned with the computer aided dynamics of rigid bodies with the aim to give an insight into the contemporary classical dynamics from the computational point of view. This should familiarise a reader with the basic concepts of todays computational dynamics whose modelling procedures and numerical techniques are realized in various program packages. The motivation for this approach stems from the fact that in the contemporary engineering praxis a lot of dynamical problems arise but only very few of them can be solved in the analytical form by following classical calculation by hand approaches. For the majority of problems (large-scale problems, analytically nonsolvable differential equations, non-linear tasks, coupled problems etc.) computational methods have to be applied. This fact gives rise to many open questions concerning the optimal use of modelling procedures as well as the computational tools available within the various program packages. The experience shows that for an accurate and effective computation, mechanical and mathematical models of the given engineering problem have to be properly established. The computational model should contain all necessary information considering the mechanical phenomena under investigation. It also should be formulated properly to suit the computational method that is intended to be utilized to obtain the nal solution. On the other hand, many computational methods for the various kinds of problems are at the users disposal today. Among them the appropriate ones for the problem at hand should be chosen and applied. In this book our main goal is to provide the basic principles of the contemporary computational dynamics of rigid body systems as well as the necessary theoretical background. The main issues of the multibody dynamics modelling concepts, exposed in the extent form the rst introductional insights to the contemporary engineering applications, are in the focus of the study. In course of the text, the more advanced concepts of multibody dynamics are given after selected basic topics of engineering mechanics are shortly introduced. Since these selected topics are necessary content of the most engineering curricula, a reader with an adequate educational background (higher semester undregraduate student of mechanical or aerospace engineering, graduate student starting research in computational dynamics or engineer professionally interested in this domain) should have no problems in building up his expertise starting from the theoretical common ground. A knowledge on the mathematical analysis, covered by the university courses on this topic, as well as the basic knowledge on engineering numerical analysis is
3 assumed. Some degree of familiarity with the contemporary engineering computational tools is not assumed but would be of help. The starting point of the book is the question: What should be considered in establishing a proper computational model that should be successfully solved ? Authors
Chapter 1 Mechanical and Mathematical Modelling
1.1 Introduction
1.1.1 Issues of applied dynamics
Dynamics can be classied into several sub-domains. Each of them has its own modelling assumptions and procedures. In most of the cases, the computational methods are also different. According to the characteristics of the problem and the focus of the intended dynamical analysis, the sub-domain whose approach is best suited to the problem at hand should be chosen. In sequel of the chapter, an overview of the characteristics of sub-domains and problems of the contemporary dynamics is given. Multibody dynamics Multibody dynamics deals with the mechanical systems of interconnected rigid bodies that undergo large displacements and rotations [23], [21]. The bodies are interconnected by kinematical constraint elements and coupling elements. Both viscoelastic and inertia properties of a real engineering system are discretised during the process of shaping of the systems mechanical model. Mathematical modelling of the established discretised mechanical model leads to ordinary differential equations (ODE) (minimal form mathematical models) or to differential-algebraic equations (DAE) (mathematical models in descriptor form). The concepts of multibody dynamics can be successfully utilized within the framework of the following engineering applications: vehicle systems, aircraft subsystems, robotic systems, various kind of mechanisms, biomechanical systems, mechatronics [22]. 1
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
Structural dynamics
Structural dynamics deals with deformable mechanical structures whose segments generally do not undergo large displacements and rotations (not kinematical chains). The mass and visco-elastic properties of a system are distributed along the structure. The basic mathematical modelling generally leads to partial differential equations (PDE). The discretisation of a system that is usually performed in the sequel of mathematical modelling procedure yields a mathematical model in the form of ODE. By using nite element approach [2], very powerful computational procedures are available for tackling the problems of structural dynamics. Typical structural dynamics applications are: plates, shells, aircraft structures, trusses, civil engineering structures. Flexible multibody dynamics In the framework of exible multibody dynamics, segments of a system are considered to be exible. Flexible multibody dynamics typically deals with non-linear structures whose segments undergo large rigid body motion superimposed by exible deformations [13]. Modelling and computational procedures of multibody dynamics and structural dynamics are being combined in order to formulate efcient procedures for problems of this kind. The methods of exible multibody dynamics are subjects of extensive ongoing research activities [24]. The applications of exible multibody dynamics systems can be found in various multibody systems with connected rigid and exible segments. Some of the examples are aircraft rotary wings, exible robots, biomechanical systems and highspeed mechanisms. Problems of dynamics In dynamics various classes of problems can be distinguished. Inverse dynamics Inverse dynamics deals with determination of applied and constraint forces and torques for a mechanical system whose motion is prescribed [18], [4]. Besides full dynamic approach, in which all forces of a system are considered in the computation, the quasi-static approach of inverse dynamics can be applied. Within the framework of quasi-static approach, the inertia forces of the system are neglected. In most of the cases, an inverse dynamics problem leads to a set of algebraic equations.
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
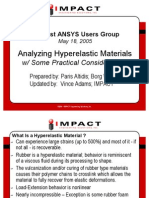
Dynamics
Dynamics of MBS
Structural dynamics
Dynamial behaviour (stability tests)
Inverse dynamics
Forward dynamics
Optimisation
Dynamical modelling
Deriving dynamical equations
NewtonEuler approach
Lagrange approach, Jourdains principle etc.
Inverse dynamics (Solving of linear algebraic equations)
Descriptor form Reduction before formulation integration
Minimal form formulation Stability criteria Stability analysis
Forward dynamics
Forward dynamics
Linear analysis
Linearization of the equations Linear forward dynamics
DAE system
Reduction during integration
ODE system
Linear ODE (vibration analysis)
Integration of DAE
Integration of ODE
Figure 1.1: Issues of applied dynamics
Forward dynamics Forward dynamics deals with determination of the motion of a system that is subjected to prescribed applied forces and torques [21], [17]. In the most engineering applications a forward dynamics problem leads to solving of non-linear ordinary differential equations (the system bodies undergo large rotations, coupling elements of the system possess non-linear
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
characteristics etc). Depending on formulation of a mathematical model, the additional algebraic equations may be imposed on the system. Vibrations The solving of a vibrational problem in linear domain [15], [26] leads to determination of system eigenvalues and modes in most of the cases. The system stability problem can also be mentioned in this context. In the framework of some very important industrial applications (non-linear vibrations within the vehicle sub-systems, acoustical problems etc.) nonlinear vibrational problems have to be tackled. Optimisation A problem of the optimisation of mechanical systems (weight, costs, structural deformations and stresses, dynamical trajectories are some of the quantities that can be optimised) is very important in engineering and lies far out of the scope of this book [3], [7]. However, it can be stated that specialised methods and algorithms that allow for optimisation of mechanical systems according to the specied criteria may be applied. In some cases an improved design can be possibly achieved without utilization of the specialised optimisation algorithms: there are optimisation problems where repeated dynamical simulations and variations of design parameters can lead to the improved solutions. In Figure 1.1 issues of applied dynamics as well as the problems of dynamics and solving methods are depicted schematically.
1.1.2 Modelling of Mechanical Systems
Modelling of mechanical systems has two major steps that are illustrated in Figure 1.2. The rst step is mapping of reality (an engineering object) into a set of the simplied entities in order to establish a mechanical model [20]. Mechanical model must include the effects under consideration, but should not be too complex i.e. the models should be as complex as necessary but as simple as possible (A. Einstein: Everything should be made as simple as possible, but not simpler). Mechanical modelling is not an unique but an iterative process. It needs a lot of engineering experience since proper analogies between reality and the model, dependent on the goals of the analysis, have to be established. Once the mechanical model is built, a mathematical model, i. e. a set of the governing equations which describe the models dynamical behavior, has to be formulated in the second step [8]. Mathematical modelling is also not an unique process.
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
M gen y + q v y, y, t ) q a gen
..
Figure 1.2: Steps of modelling
It depends on the goals of analysis and the computational procedures and tools as well as the computer hardware that are intended to be used. Mechanical modelling Mechanical modelling is a process that is affected by the character of the problem and focus of the intended analysis in the rst place. Second, the characteristics of a real objects are important, but only within the scope of a given task and intended analysis. A real object can be modelled using different mechanical elements: an aircraft can be considered as a sole rigid body within the scope of ight mechanics, but it has to be modelled as a multibody system to analyse the landing dynamics phenomena. If its space trajectory is under investigation, a large space station can be modelled as a particle, but on the other hand, a tennis ball has to be considered to be an elastic body in the case of its impact analysis. The crucial modelling criteria is that mechanical model should be able to describe (take into account) those mechanical properties of a real system that are under the consideration with the desired accuracy. Mathematical modelling Mathematical modelling is a process of formulating a mathematical text (a set of equations of motion, for example) referred to the established mechanical model by following physical laws and principles (Newtonian classical mechanics, smooth or non-smooth theory). A good and effective mathematical model has to reect the type and character of the analysis that is to be performed (for example, linear or non-linear analysis),
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
but also has to be properly formulated to suit the computational procedures and algorithms that are intended to be used for a manipulation and evaluation of the generated equations [8]. In some special cases, a solution of the established mathematical model may be found analytically. If so, the obtained solution is exact under the assumptions made during mechanical and mathematical modelling. Nevertheless, in most of the cases computational procedures have to be utilized to nd numerical solutions. In the past three decades numerous computational techniques and algorithms have been established to generate the governing equations for various classes of problems and specic kinds of the analysis (multibody systems, structural systems, systems with the unilateral or variable constraints etc.). These algorithms are the core of various program packages that are offered in the market today [21]. Although very often the intended mechanical analysis can be carried out by starting initially from different mathematical models, an appropriate mathematical modelling can inuence a computational procedure itself to a great extent (reducing the computation time or gaining more accurate results).
1.2 Mechanical Modelling
As it was mentioned in Chapter 1.1.2, mechanical modelling is a process of mapping of reality to a set of simplied elements. The established set of elements (mechanical model) has to be able to describe those mechanical properties of a real system which inuence dynamical phenomena under consideration. Given the goals of analysis and characteristics of a real system whose dynamical behaviour has to be investigated, a rst step toward establishing a proper mechanical model is a decision whether the system is to be modelled as a multibody system or the modelling principles of structural dynamics are to be applied. Many engineering systems consist of large number of bodies interconnected by the constraint elements such as joints, bearings, springs, dampers or actuators. These systems can be successfully modelled as multibody systems. It can be stated generally that if bodies in a system undergo large motion and small vibrations, a very powerful tool is the modelling using multibody system approach. If multibody system concept is adopted for modelling purposes, a real system will be discretised by means of the elements that will be reviewed in the sequel of the chapter. The discussion will be conned to the modelling principles of classical multibody dynamics (the models are established as systems of interconnected rigid bodies) and exibility of segments is not considered. Since kinematical structure of a system determines its characteristics to a great extent, the types and the character of kinematical constraints and the way they determine a behaviour of the system will be discussed in detail. The classication of
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
the forces that appear in multibody systems will be also overviewed. Another part of mechanical modelling is an idealised description of a real load. It may be introduced in a model as concentrated forces and moments as well as the forces and moments distributed over line, surface or volume [2]. An appropriate modelling of a load is also dependent on the particular task and the established model itself. Once the mechanical model is established, a corresponding mathematical model has to be formulated.
1.2.1 Elements of Multibody Systems
As it is depicted in the Fig. 1.3, multibody systems consist of elements with inertia and constraint elements and coupling elements without inertia [20]. Elements that posses inertia are a rigid body or, as a special case, a particle. Therefore, systems of particles and lumped mass systems may be regarded as special cases of multibody systems. Within the coupling elements two types of actuators can be distinguished: Actuators that prescribe the particular applied forces as the functions of time (force actuators). The motion of a system caused by this type of actuators is generally not known. It is a subject of the forward dynamic analysis of a given task. Actuators that prescribe a motion of the system, i.e. prescribe the particular displacements or rotations of the systems bodies as functions of time (displacement actuators). The forces imposed by the actuators of this type are generally not known. These forces are subject of the inverse dynamic analysis of the system at hand [18]. Since these actuators prescribe systems motion (a system is constrained to evolve in time in the specic way), the actuators of this type can be considered as kinematical constraints. Consequently, the forces imposed by them are classied as constraint forces (see classication of forces and kinematical constraints in the sequel of the chapter). The actuators of this type are also called kinematical drivers.
1.2.2 System forces
Forces that appear in multibody systems can be classied into the categories as discussed in the sequel. Classication of system forces is important due to the fact
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
Passive elements Pn rigid body with nodal points Pi and center of gravity C mass point P P2 C P1
Coupling elements spring
Constraint elements rod
Active elements Coupling elements actuator (force / moment)
Constraint elements actuator (displacement / rotation) (kinematical driver)
Figure 1.3: Elements of multibody system
that different types of forces play a different role in the process of establishing of the mathematical model of a system (see Chapter 1.3.2). External and internal forces This classication is based on the individual choice of the systems boundary. The external forces act from the outside of the boundary. The internal forces act inside the boundary of the system. They always appear in pairs. Applied and constraint forces The applied forces are forces imposed on the system by the coupling elements as well as the forces which can be described by physical laws [14]. They inuence the way how the system evolves in time (as well as the system
damper
support, bearings, joints
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
constraint forces). Some examples of the applied forces are: gravity force, force actuators, springs, dampers, forces due to the magnetic eld. The constraint forces are imposed to the system by the kinematical constraint elements (joints, bearings, actuators that prescribe motion of the system). In the case of ideal constraints, these forces are collinear to direction of the restricted motion (see discussion on the kinematical constraints below). They inuence the possible motion of the system. In Figure 1.5 system forces that appear in double pendulum are analysed and classied by deriving the free-body diagram of the system.
1.2.3 Kinematical constraints
Kinematical constraints are mechanical entities that are imposed by joints, bearings and the system prescribed motions (kinematical drivers). They restrict system motion, reduce its degrees of freedom and are represented by the equations that describe the kinematical restrictions imposed on a system. Kinematical constraints are independent if these equations are linearly independent [18], [27] (number of independent kinematical constraints is equal to number of the linearly independent equations between the constraint forces, rank of the matrix in the equation (1.83)). Kinematical constraints can be independent of time (scleronomic constraints) or can prescribe the motion of the system as a function of time (rheonomic constraints). If kinematical constraints are represented by the equations comprising only displacements and rotations i.e. the constraints are at the position level since there are no velocities or accelerations present in the equations, the constraints are called holonomic constraints. If constraint equations are at the velocity level (containing time derivatives of position coordinates) but can be directly transformed by integration into the position level, they are also holonomic. If constraint equations are at the velocity level and they can not be directly transformed into the position level (unless system is integrated as a whole), they are called non-holonomic constraints [20], [30]. In the case of ideal kinematical constraints (the joints and bearings as well as the kinematical drivers are assumed to be rigid and frictionless), the direction of constraint force that is imposed by the particular kinematical constraint is directed along the direction of the constraint itself. The considerations in this chapter are restricted to ideal and holonomic constraints.
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
System coordinates and degrees of freedom
10
In the case of a totally unconstrained free system of p rigid bodies, a degree of freedom (DOF) of a system is 6p. It stems from the fact that 6p independent coordinates are necessary to describe kinematical conguration (position and orientation of the systems bodies) uniquely. Consenquently, if motion of mechanical system of p unconstrained bodies is restricted to a plane (a planar system), it posses 3 p DOF. If q holonomic constraints are added to the system, its degree of freedom is reduced. If all q constraints are independent, a degree of freedom of the system is f = 6p q. If only r of the q constraints are independent, a degree of freedom of the system is f = 6p r. The number r of independent constraints is equal to the rank of matrix Q in equation (1.83).
Figure 1.4: Degree of freedom of mechanical system: double pendulum If system possesses f DOF, there are f independent coordinates necessary to describe the conguration of the system uniquely. This means that position of each body, expressed most often via Cartesian position of body center of mass, and its orientation can be expressed as mathematical function of adopted independent coordinates and system geometrical characteristics (length of linkages, for example). These coordinates are called generalised coordinates and can be chosen in different ways appropriate to the particular problem. A choice of a set of generalised coordinates may strongly inuence the process of mathematical modelling as well as the process of solving the equations (see Chapter 1.3).
1 B 2 g
qA + 2 qB + 2
p+2 f +3@2*4+2 n+4*4+0
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
11
In Figure 1.4 the concept of generalised coordinates and system degree of freedom is explained using example of simple mechanical (multibody) system i.e. double pendulum. Since it is a planar system of two bodies constrained by four constraint equations imposed by joints A and B (holonomic constraints), planar double pendulum posess f = 2 DOF. Consenquently, two generalized coordinates may be introduced, in order to describe the conguration of the system. So, if parameters 1 and 2 are adopted as a set of generalized coordinates, the system evolution in time is completely dened by keeping track of the coordinates 1 (t) and 2 (t). By knowing time functions 1 (t),2 (t) a kinematical conguration of the system (the coordinates of the bodies center of mass x1 ,z1 ,x2 ,z2 and bodies absolute orientation 1 and 2 ) can be determined by the equations: x1 (t) = 0.5l1 sin 1 (t), z1 (t) = 0.5l1 cos 1 (t), x2 (t) = 0.5l2 sin 2 (t), z2 (t) = 0.5l2 cos 2 (t), 1 (t) = 1 (t), 2 (t) = 2 (t). Velocities and accelerations of a system can be expressed via generalized velocities 1 , 2 and generalized accelerations 1 , 2 by differentiation of the conguration equtions given above. This is typical for holonomic systems. If other set of independent coordinates is introduced, for example parameters 1 and 2 , the conguration equations would have a different shape. Although a choice of any set of coordinates that can serve for unique description of system kinematical conguration is principally a valid one, this choice may inuence a numerical efcency as well as accuracy of overall calculation. This can be illustrated by following. Lets assume that body coordinates z 1 and z2 are chosen as system generalized cordinates. If system is restricted to move that applies x 0, kinematical conguration of the body 1 is determined by: x1 =
2 2 l1 z1 , z1 = z1 , 1 = arccos
z1 . l1
z At the velocity level, it can be shown that x1 is expressed by x1 = x1 z1 , which 1 means that for the position of a system that is characterized by x1 = 0 (body 1 align with z axis, 1 = 0) equation fails to give required dependency. Furthermore, in all congurations of the system around position 1 = 0 numerical accuracy of the calculation will be low (why?). The similar situation will occur in the context of body 2 around position 2 = 0. Without going into details it can be said that this happens because the chosen generalized coordinates fail to follow the motion of the system in those particular kinematical congurations (coordinates z1 and z2 are exactly ortogonal to the direction of the system motion, i.e. system velocities, in those positions).
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
12
If such situation is likely to occur, the choice of set of generalized coordinates is not an optimal one and, at least in the vicinity of critical system congurations, one should switch to an another set of coordinates. A reader, interested in research that addresses more advanced issues of conguration space geometrical properties as well as the optimal choice of the generalized coordinates, can nd more details in [28], [30]. Generally, mathematical modelling of holonomic system dynamics using a set of f generalized coordinates is called mathematical modelling in minimal form (Chapter 1.3). If number of coordinates exceedsf (number of system DOF), the model is in descriptor form. The extreme case is full descriptor form in the context of which the maximal number of 6p coordinates is used to describe system conguration (Chapter 1.3). Types of mechanical systems Mechanical systems can be classied in terms of the number of its DOF and how the imposed kinematical constraints are arranged (Figure 1.6 and Figure 1.7). Statical determination If all q constraints are independent, a system is statically determined. On the other hand, if only r of the q constraints are independent, than n = q r constraints are superous or redundant. The system is statically n times overdetermined. In this case constraint forces can not be calculated without introducing further modelling assumptions (elastic properties, for example). In Figure 1.6 and Figure 1.7, the systems 1.6 d) and 1.7 d) are statically overdetermined. Kinematical determination A system is kinematically determined, f = 0, if displacements and rotations of all its members are completely determined by the constraints. Within this type two cases can be distinguished. If all kinematical constraints do not depend on time, the system is a statical one. In Figure 1.7, the systems c) and d) are of this type. Otherwise, if f = 0, but at least one constraint is dependent on time, the system does not have a xed conguration but evolves in time and can be considered as a kinematical or dynamical system. Generally, the kinematical constraints that do not depend on time are called scleronomic constraints and those constraints that depend on time are called rheonomic ones.
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
13
Figure 1.5: Forces in mechanical system: a double pendulum
If kinematical conguration of a system is not fully constrained by the kinematical constraints, i.e. f = 6p r > 0, the system has f degrees of freedom and it is kinematically undetermined. All examples presented in Fig. 1.6 as well as the examples a) and b) in Fig. 1.7, are kinematically undetermined. Note: mechanisms are kinematically undetermined, f > 0, as long as their motion is not prescribed. For example, the well known four-bar linkage possesses 1 DOF if there is no rheonomic constraint which determines its motion
m1 g
F10 y F10 x C1 F12 x F21 x F12 y m2 g C2
systems boundary
F21 y
Fx
Fy
Force external F10 x F10 y F12 x F12 y F21 x F21 y m1 g m2 g Fx Fy internal applied constraint
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
C a) y + xC yC g C
T
14
f+3@1+3 n+0*0+0
y + xC
y + xC C
e)
y + g
Figure 1.6: Systems with various constraints and DOF: rigid beam with various supports
(if so, it is kinematically determined, f = 0). Types of statical and dynamical analysis Depending on the kinematical structure of a mechanical system (Figure 1.6 and Figure 1.7), different kinds of analysis can be performed. Kinematically determined system In the case of the kinematically determined system, a static analysis [25] or an inverse dynamic analysis can be performed (it depends on whether the system
d)
c)
b)
f+3@1*1+2 n+1*1+0
T
y + xC g C
f+3@1*2+1 n+2*2+0 (Slider)
f+3@1*2+1 n+3*2+1
f+3@1*2+1 n+2*2+0 (Pendulum)
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
a) C1
T
15
C2 y + g1 g2
f+3@2*4+2 n+4*4+0
y + g1
d) C1
C3 C2
C3 C1
C2
Figure 1.7: Systems with various constraints and DOF: structures and mechanisms
is a statical one or its structure evolves in time). In both cases a geometrical conguration of a system is not dependent on the applied forces that are imposed on the system: its motion is completely dened by kinematical constraints. Kinematically undetermined system If a system is not fully kinematically constrained but possesses f degree of freedom, a time evolution of the systems kinematical conguration is not
c)
C1
C2
b)
C1
C2
f+3@2*5+1 n+5*5+0
f+3@2*6+0 n+6*6+0 statically and kinematically determined support
f+3@3*9+0 n + 10 * 9 + 1 statically overdetermined support
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
16
fully determined by kinematical constraints and it is dependent on systems applied forces. To determine the systems motion, forward dynamical analysis must be performed. If the systems constraint forces are of interest, they can also be calculated during forward dynamic analysis or subsequently after a motion of the system is determined (depending on formulation of the systems governing equations).
1.3 Mathematical modelling
1.3.1 Basic laws and equations
Before formulating governing equations of multibody systems, we survey dynamics of particles and rigid bodies based on the laws of classical mechanics. The vectorial entities like displacements, velocities, forces and torques, possessing a magnitude and direction, are represented by vectors and designated using bold italic font like f or r. Magnitudes of vectorial components along the axis of an adopted coordinate system represent coordinates of vectors in the chosen coordinate system. For the metter of computation, vector entities are represented by arranging the coordinates in one-dimensional arrays (one-column matrices). In computational mechanics and control literature sometimes all types of one-column matrices are generally called vectors (one-column n-component arrays that, for example, may represent the components of all forces acting on a multibody system or multiple values of system control input) but they should not be confused with the vectors in the sense of classical mechanics. Similarly, tensors are arranged in multi-dimensional arrays. The aim of adopting matrix representations is to perform required vector/tensor operations by using operations with matrices that can be easily utilised in computer applications. Starting from the classical vector representation, matrix equations of the basic expressions needed for formulation of mathematical model of multibody systems will be derived. Dynamics of particles By applying Newtons second law, the equation of motion of a particle depicted in Figure 1.8 can be written [11],[25] as f = m = mv = ma = r where mv is linear momentum of a particle. d (mv) , dt (1.1)
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
17
f z r O x
Figure 1.8: Motion of particle
v y
Vector r denotes position vector of a particle in inertal (non-accelerated) co ordinate system. Velocity of a particle is given by v = r while acceleration is determined as a = r . As known from basic textbooks of classical mechanics, in order to apply Newtons second law correctly, the derivatives in (1.1 ) must be derived with respect to the inertial coordinate system. The angular momentum of a particle with respect to O is given by hO = r mv . E QUATIONS
OF MOTION OF SYSTEM OF PARTICLES
(1.2)
f2 f1 z O x
e
e i f 21 i f 12 i f 1p
i f 2p
r2
i f p1
i f p2
r1 y
rp fp
Figure 1.9: System of p particles If system of p particles shown in Figure 1.9 is considered, Newtons law for the i-th particle yields f i = f e + f ii = mi ai (1.3) i
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
18
where f i e denotes the resultant of external forces acting on the i-th particle. The resultant of internal forces f i i is given by the equation
p
f ij = f ii .
j=1
(1.4)
In the equation (1.4), f ij represents system internal forces which act between the bodies i and j. According to Newtons third law [14], it is valid f ij = f ji . When summing up over the entire system of p particles, it can be written
p p p p
(1.5)
fe i
i=1
+
i=1
f ii
=
i=1
mi a i
,
i=1
f ii = 0 ,
(1.6)
and nally
fe = i
i=1 i=1
mi a i .
(1.7)
The equation (1.7) can be further elaborated by using relations as follows. The position rC of the system mass centre C is dened by
p
mr C =
i=1
mi r i ,
(1.8)
p where m = i=1 mi is total mass of the system. Differentiation of (1.8) with respect to time leads to linear momentum of the system of particles p
mv C =
i=1
mi v i .
(1.9)
The second differentiation of (1.8) yields
p
maC =
i=1
mi a i ,
(1.10)
which can be introduced into (1.7)
p
f e = maC . i
i=1
(1.11)
According to (1.11), the mass centre of system of particles moves as if entire mass of the system were concentrated at that point and all the external forces were
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
19
ith particle, m i
z A O x y vA
r Ai
fi vi
Figure 1.10: Angular momentum of i-th particle
applied there [25]. A NGULAR MOMENTUM OF SYSTEM OF PARTICLES Angular momentum of the i-th particle about an arbitrary moving point A (Figure 1.10) reads as hAi = r Ai mi v i (1.12) and differentiation leads to hAi = r Ai mi v i + r Ai mi v i . (1.13)
If A coincides with the xed point O (r Ai v i = v i v i = 0), then it can be written hAi = r Ai mi v i = r Ai f i , (1.14) or hAi = lAi , (1.15)
where lAi is the resultant torque with respect to A (Figure 1.10). The angular momentum of system of particles about the moving point A is
p
hA =
i=1
r Ai mi v i .
(1.16)
After differentiation of (1.16) with respect to time and some algebraic operations, the equation (1.13) for a system of particles has the form
p
hA = r AC mv C +
i=1
r Ai f e , i
(1.17)
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
20
where r AC is the position vector of mass centre of a system of particles with respect to point A. When point A coincides with the xed origin O (r AC = r C = v C , v C mv C = 0 ) or point A coincides with the centre of mass C, equation (1.17) reduces to
p
hA =
i=1
r Ai f e . i
(1.18)
So, if A coincides with C, equation (1.17) can also be written as
p
hC =
i=1
r Ci f i e , hC = l C ,
p
(1.19)
or where
(1.20)
lC =
i=1
r Ci f i e
(1.21)
is the resultant moment of all external forces acting on the system of particles about the mass centre C. It should be mentioned that dynamics of particle is completely described by the Newtons equation (1.3). An introduction of angular momentum, Eq. (1.12), results in redundant information. It has been introduced here as a prestage to dynamics of rigid body, where consideration of angular momentum leads to the essential Eulers equation. Dynamics of rigid body Prior to deriving governing equation of rigid body dynamics, in the next section some basic kinematical relations will be recapitulated. BASIC KINEMATICAL RELATIONS In Figure 1.11 the following notation is used: rA (x, y, z) (x , y , z ) angular velocity of a body, position vector of the point A (body-xed reference point), inertial coordinate system k, coordinate system xed to the body k .
Since a rigid body is considered (Figure 1.11), r is a body-xed position vector which does not change its magnitude but only its orientation due to rotation of the body. Its time derivative with respect to the inertial system k can be expressed as r =r . (1.22)
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
21
z y A z O x rA v A y rC rC r r x C
dm
Figure 1.11: Rigid body
With the previously introduced notation, r can be written as r = rA + r and the velocity is obtained as v = v A + r = v A + r . (1.24) (1.23)
An orientation of a body in the inertial coordinate system can be determined via Euler angles , , [12] that specify an orientation of a xed body system k with respect to the inertial system k. Other possibilities to describe orientation of a body-xed ccordinate system include Bryant angles, Euler parameters, Rodriguez parameters etc. [5], [18]. A relation between and the derivatives of the Euler angles xR = [ ]T can be expressed in matrix form as = H R xR . L INEAR MOMENTUM Mass of a body is given by m=
m
(1.25)
dm ,
(1.26)
and the position vector of body centre of mass C in coordinate system k is rC = 1 m r dm . (1.27)
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
The position of C with respect to a body-xed point A is given by r AC = r C = 1 m r dm .
22
(1.28)
From (1.24), linear momentum of a body can be written in the form (v A + r ) dm = v A
m m
dm +
m
r dm ,
(1.29)
or (v A + r ) dm = v A m + mr C
m
= m(v A + r C ) = mv C = mr C .
(1.30)
A NGULAR MOMENTUM Absolute angular momentum of a body with respect to O (origin of the inertial coordinate system) is determined by [5] hO =
m
r r dm
(1.31)
or after introducing r = rA + r , hO =
m
(1.32)
(rA + r ) (v A + r ) dm r ( r ) dm .
m
= r A (v A + r C )m + r C v A m + The term
m
(1.33)
r ( r ) dm can be written in the form r ( r ) dm =
m m
(r 2 E r r ) dm (1.34)
= IA ,
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
where I A is the inertia tensor of the body with respect to A IA =
m
23
(r 2 E r r ) dm ,
(1.35)
E is the unit vector and r r denotes dyadic product. Finally, if body centre of mass C is chosen as the reference point A (r C = 0 ; v A v C ; r A r C ) and equation (1.34) is taken into account, (1.33) becomes hO = r C v C m + I C . (1.36)
E QUATIONS OF MOTION OF RIGID BODY Newtons equation determines dynamics of a bodys translational motion [14] d (mv C ) = f , dt where: mv C is linear momentum of a rigid body, f is resultant of all forces acting on a body. If mass of a body is constant (dm/dt = 0), the equation (1.37) becomes maC = f . Eulers equation determines dynamics of a bodys rotational motion hO = lO , where: hO is absolute angular momentum with respect to the xed reference point O in the inertial space, lO is resultant torque with respect to O. A result of the derivative of equation (1.36) with respect to time is hO = v C v C m + r C maC + I C + I C , and since v C v C m = 0 , hO = r C maC + I C + I C . (1.41) (1.40) (1.39) (1.38) (1.37)
By substituting equation (1.41) into equation (1.39) and by considering equation (1.38), Eulers equation can be written in form I C + I C = lO r C f = l C , (1.42)
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
or simply I C + I C = lC .
24
(1.43)
N EWTON -E ULER EQUATIONS IN MATRIX FORM By following the rules of matrix algebra, vector-valued equations (1.38) and (1.43) can be written in the matrix form [18] maC = f , IC + IC = lC . The matrix stands for the bodys angular acceleration = and vector product is performed using the skew-symetric matrix . Matrix equation (1.44) is derived from a non-coordinate expression (invariant form) (1.38) by using an inertial coordinate system k. On the other hand, matrix equation (1.45) is derived from invariant form (1.43) by using a body-xed coordinate system k . By using a body-xed coordinate system the components of inertia tensor of a body with respect to C remain constant. This is very convenient from the computational point of view. (1.44) (1.45)
1.3.2 Mathematical models and procedures
Mathematical models As a result of mathematical modelling via different methods for formulation of the governing equations, two basic forms of the mathematical models can be distinguished: descriptor form and minimal form. Each of these forms possesses specic characteristics, being more or less appropriate for a particular dynamic analysis. Once the model is established, these characteristics determine to a great extent the computational procedures that are to be used in the subsequent computational process [1], [6]. Descriptor form characteristics number of coordinates and differential equations are larger than the number of DOF type of differential equations: DAE lower degree of non-linearity of the differential equations Minimal form characteristics
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
25
number of coordinates and differential equations is equal to the number of DOF type of differential equations: ODE highly non-linear differential equations
Governing equation (holonomic system) p...bodies, q...constraints, f...DOF
Full descriptor form 6p dynamical equations of the freebody diagram, 6p cartesian coordinates x q kinematical constraints equations f + 6p * q
Minimal form f equations of motion, f generalised coordinates y
q kinematical constraint equations
Figure 1.12: Forms of mathematical model
Approaches to computational procedures Independent on the form of the established mathematical model, two forms of obtaining a solution of the governing equation can be distinguished: a closed form solution and numerical (approximate) solution. If methods for obtaining numerical solution have to be applied (this is a case for the most engineering applications), this can be done by using either symbolic or numerical approach to computational procedures [21]. Closed form solution Searching for a closed form solution pays off if there are indications that a solution of the established mathematical model can be found by using pure analytical methods. In this case the result is expressed in the form of functions. The solution is exact under the assumptions that have been made during mechanical and mathematical modelling of a system (the obtained solution would be free of numerical errors of any kind).
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
26
Unfortunately, in most of the cases (except for some linear models and simpler tasks of small dimensionality), it is not possible to nd a closed form solution and a numerical procedure has to be applied to obtain a solution of the model (a numerical procedure may be launched immediately after mathematical model is established, or some symbolic manipulations and simplications can be performed prior to the numerical calculations). Symbolic approach Symbolic mathematical operations consist of the manipulations with mathematical entities without assigning their numerical values. If a computational tool gives possibilities for symbolic calculations, sometimes a more efcient computational procedure can be achieved by simplifying the established mathematical model before an iterative numerical procedure is launched. Once mathematical model is established by using symbolic formalisms, it can be used for repeated numerical calculations e.g. in numerical integration schemes. However, the extent to which an efciency may be improved using the symbolic tools is dependent on the task (mathematical model) at hand. Symbolic manipulations are often computationally more costly than the numerical procedures. It is specially true for some types of problems in the context of which some very efcient numerical procedures can be utilized e.g. the sparse matrices techniques. Although symbolic procedures are much in use in todays computation, formulation and implementation of symbolic algorithms are the topics of the extensive ongoing research activities. Numerical approach By using this approach, numerical values are assigned to symbolic items as soon as mathematical model is established and the whole computational process deals with numerical values. The majority of the computational packages on todays market are numerically oriented, especially packages and tools that are designed for a general use [21].
1.3.3 Formulation of governing equations
When performing dynamic analysis of a given mechanical system, a formulation of governing equations is the main part of mathematical modelling. It is the rst stage of mathematical modelling independent of the dynamical task at hand (inverse dynamical problem, forward dynamics, optimization problems, etc.).
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
27
Derived mathematical model serves as a basic set of equations by means of which the systems motion and constraint forces can be determined. In most of the cases, the basic set of equations will have to be manipulated further to suit the intended analysis and computational procedure. As it was already explained, an output of different formalisms consists of mathematical models shaped in different forms which require different numerical procedures and algorithms in order to obtain the nal solution. In sequel of the chapter the methods for formulation of the governing equations of multibody systems are elaborated. These methods are among some of the most commonly used methods in the computational dynamics today. The main characteristics of each method as well as the application properties are provided briey. Some illustrative examples are given in the Chapter 2. Multibody systems of free bodies Prior to investigation of a constrained mechanical system, a system of free bodies is considered to prescribe nature of the underlying dynamics. A multibody system of free bodies, shown in Figure 1.12, is a mechanical system of rigid bodies whose motion is not constrained by kinematical constraints of any kind. Therefore, if system consists of p bodies, it possesses 6p degrees of freedom (DOF).
f1
e
l1
w1
i f 1p
C1 m1 I1 z y O x l2 f2
e i f 21 i f 12
i f p1
v1 vp w2 C2 m2 I2
i f 2p
fp mp Ip Cp
lp wp
i f p2
v2
Figure 1.13: Free-body diagram of multibody system of free bodies A determination of absolute position and orientation of the i-th body of a system is given by the vector of the body mass centre expressed in the inertial coordinate
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
28
system (Cartesian system is used but the other coordinate systems can be chosen as well) xTi = [xi yi zi ]T , and Euler angles of bodys absolute orientation xRi = [i i i ]T . (1.47) (1.46)
(Note: In Eq. (1.46), (1.47) and subsequent text the index C is omitted since centre of mass will always be referred to describe a position of the body.) By grouping equations (1.46) and (1.47) together, a body absolute position vector can be introduced in the form xi = [xT xT ]T . (1.48) Ti Ri Newton-Euler equations of i-th body Newton-Euler equations are basic equations of rigid body dynamics, see Chapter 1.1. Newtons equation determines dynamics of a bodys translational motion, while a bodys rotational motion is determined by Eulers equation. Newtons equation is given by mi a i = f i , or in the matrix form mi xTi = fi . Eulers equation is expressed by I i i + i I i i = li , or, following the rules of the matrix algebra, Ii i + i Ii i = l i , where a bodys angular acceleration is given by the equation i = i . (1.53) (1.52) (1.51) (1.50) (1.49)
A relation between bodys angular velocity i and time derivatives of Euler angles xRi = [i i i ]T , by means of which absolute orientation of a body in the inertial coordinate system is specied, can be given in the form [5] i = HRi xRi , and the differentiation with respect to time using the chain rule yields i = HRi xRi + i . (1.55) (1.54)
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
29
In equation (1.55), all terms in which second derivative appear linearly are ex pressed in the product HRi xRi and all others are grouped in i . By taking into account equations (1.55), equation (1.52) can be written in the form Ii HRi xRi + Ii i + i Ii i = li . (1.56)
Furthermore, the equations (1.50) and (1.56) can be grouped together to form Newton-Euler equations of the i-th body in the matrix form: mi E 0 0 Ii or in short M i H i xi + q v = q a . i i The dimensions of the matrices in equation (1.58) are dim[Mi ] = 6 6, dim[Hi ] = 6 6, dim[ i ] = 6 1 , x dim[qv ] = 6 1, dim[qa ] = 6 1 . i i Newton-Euler equations of p bodies By formulating equation (1.58) for each body in the system (i = 1...p), NewtonEuler equations of the multibody system of free bodies can be obtained in the form: MH + qv = qa , x (1.59) where the matrices are specied as follows x = [xT xT ... xT ]T , dim[x] = 6p 1 , 1 2 p m1 E 0 0 0 0 0 0 0 I1 0 0 m2 E 0 0 0 0 0 0 0 0 0 I2 0 0 0 0 0 0 mp E 0 0 0 0 0 0 Ip (1.60) (1.58) E 0 0 HRi xTi xRi + 0 Ii i + i Ii i = fi li , (1.57)
M= H=
, dim[M] = 6p 6p , , dim[H] = 6p 6p ,
(1.61)
E 0 0 HR1 0 0 0 0 0 0 0 0
0 0 0 0 E 0 0 HR2 0 0 0 0
0 0 0 0 0 0 0 0 E 0 0 HRp
(1.62)
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
0 I1 1 + 1 I1 1 0 v q = I2 2 + 2 I2 2 , dim[qv ] = 6p 1 , 0 Ip p + p Ip p f1 l1 f2 qa = l2 , dim[qa ] = 6p 1 . fp lp
30
(1.63)
(1.64)
In the case of multibody system of free bodies, Newton-Euler equations (1.59) are the equations of motion of a system. Equation (1.59) represents 6p dimensional ODE system. It can be integrated in time for specied initial conditions x0 , x0 to determine the systems motion (vari ables x , x , x). Some computational issues Inertia matrix MH in Eq.(1.59) has non-symetrical properties which may decrese signicantly an efciency of computation. In the framework of integration of governing equations, a non-symetric inertia matrix prevents use of very efcient numeric procedures which require its symetrical properties (e.g. Cholesky method). Therefore, to improve an efciency of the procedure, it may be helpful to symmetrise the matrix MH. This can be done by premultiplying Eq.(1.59) by H T , which reads HT MH + HT qv = HT qa . x (1.65) In many applications an integration of (1.65) requires a less computer-power than integration of (1.59). Constrained multibody systems M ATHEMATICAL MODEL IN FULL DESCRIPTOR FORM Constrained multibody system (Figure 1.14) is a mechanical system of rigid bodies whose motion is constrained by kinematical constraints. If a system consists of p
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
31
bodies whose motion is constrained by q kinematical constraints, the system possesses f = 6p q DOF .
ek
f1 l2
e1
f1 m1 I1
e1
l2
eh
m2 I2
Figure 1.14: Constrained multibody system (mechanical model)
The following notation is used: e f i j . . . j-th (j = 1...k) applied external force that acts on the i-th body (i = 1...p), e li j . . . j-th (j = 1...h) applied external torque that acts on the i-th body (i = 1...p). In Figure 1.13 this is illustrated at the body i = 1. Forces in a constrained multibody system Applied forces In Figure 1.15, a free-body diagram of constrained multibody system is derived. Resultant applied force that acts on the i-th body is f i = f ie + f ii , (1.66)
where resultant force of the external applied forces, reduced to the centre of mass Ci , can be written as
k
fe i
=
j=1
fi j
and resultant force of the internal applied forces (internal springs, dampers, etc.), reduced to the centre of mass, is given by the sum of the internal applied forces between the bodies i and j
p
f ii
=
j=1
i f ij .
mp Ip
(1.67)
(1.68)
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
f1
e
32
l1
i f 1p
l1
C1
i f p1 c f 12
lp
fp Cp
c f 21
lp l2 f2
e c
C2
i f 2p c f p0 i f p2
l2
Figure 1.15: Free-body diagram of constrained multibody system
Reduction of forces with different application points to the specic point implies the formulation of an equivalent couple of force and torque acting at this point. Resultant torque about the centre of mass Ci of the applied forces and torques that act on the i-th body (Figure 1.15) is
h p e li j j=1
li =
+
j=1
i lij + lredi ,
(1.69)
i where lij is an internal applied torque (internal torsional spring, for example) that acts between bodies i and j and lredi is the torque due to the reduction of the forces f ie and f ii to the centre of mass Ci .
Constraint forces Resultant constraint force that acts on the i-th body, reduced to the centre of mass Ci , is given by the equation
p
fc = i
j=0
c f ij ,
(1.70)
c where f ij is a constraint force (Figure 1.15) that acts between bodies i and j (i, j = 0...p, the index 0 stands for the body of external world). If an index i or j is equal to zero, a constraint force is of the external type (a force due to a kinematical constraint with the external world). If none of indices
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
33
i, j is zero, a constraint force is of the internal type (due to a kinematical constraint that restricts relative motion of the bodies). Resultant torque about the centre of mass Ci of the constraint forces and torques that act on the i-th body can be given in the form
p
lc i
=
j=0
c c lij + lredi ,
(1.71)
c where lij is a constraint torque that acts between bodies i and j or a body and the c c external world (i, j = 0...p) and lredi is a reduction torque of the forces f ij .
Newton-Euler equations of i-th body As it was the case with a system of free bodies, we start derivation of governing equations of constrained system by considering Newton-Euler equations of a single body. When a body is kinematically constrained, constraint forces and torques inuence a motion of a body and have to be considered in the framework of Newton-Euler equations along with applied forces and torques. Newtons equation is given by mi a i = f i + f c , i or in the matrix form mi xTi = fi + fic . Eulers equation is expressed by I i i + i I i i = li + lic , or following the rules of matrix algebra Ii i + i Ii i = li + lc . i By considering (1.55), equation (1.74) can be expressed in the form Ii HRi xRi + Ii i + i Ii i = li + lc . i (1.76) (1.75) (1.74) (1.73) (1.72)
After introduction of a body absolute position vector (1.60), equations (1.73) and (1.76) can be grouped together to form Newton-Euler equations of the i-th body mi E 0 0 Ii or in short M i H i xi + q v = q a + q c . i i i (1.78) E 0 0 HRi xTi xRi + 0 Ii i + i Ii i = fi li + fic lc i , (1.77)
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
Dimensions of the matrices in equation (1.78) are dim[Mi ] = 6 6, dim[Hi ] = 6 6, dim[ i ] = 6 1 , x dim[qv ] = 6 1, dim[qa ] = 6 1, dim[qc ] = 6 1 . i i i
34
Newton-Euler equations of constrained system of p bodies By formulating equation (1.78) for each body in a system (i = 1...p), NewtonEuler equations of a constrained multibody system can be arranged in the form MH + qv = qa + qc . x (1.79)
As it will be described in the sequel, system constraint forces qc in equation (1.79) can be expressed via kinematical constraint equations and additional parameters. Governing equations of constrained multibody systems Kinematical constraint equations Newton-Euler equations (1.79) are part of the governing equations of constrained multibody system. Since motion of system bodies is kinematically constrained, components of system position vector x are not independent but satisfy a set of q kinematical constraint equations, which can be put in the form [18] g(x, t) = 0 , dim[g] = q . (1.80)
By differentiation of (1.80) with respect to time, the equation that expresses the relation between the system velocities is obtained as g g x+ =0, x t or in the short form Qx = where the matrix Q is dened as Q(x, t) = g , dim[Q] = q 6p . x (1.83) g , t (1.81)
(1.82)
If (1.80) is differentiated twice, the equation that expresses dependency between system accelerations can be formulated. After application of chain rule of differentiation, kinematical constraint equations at the level of acceleration can be written in the short form Qx = c . (1.84)
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
35
Constraint forces via kinematical constraints It can be shown [20] that system constraint forces qc which are caused by ideal kinematical constraints (a friction is not considered, constraint forces q c are orthogonal to directions of the imposed kinematical constraints) can be expressed via matrix Q and q unknowns i , (i = 1...q) that are usually called Lagrange multipliers. If vector of Lagrange multipliers is introduced in the form = [1 2 ...q ]T , dim[] = q 1 , system constraint forces can be expressed by equation qc = Q T . (1.86) (1.85)
In the context of the equation (1.86) it can be stated, without going to the details, that directions of system constraint forces qc are expressed by the columns of transposed matrix QT while the magnitudes of constraint forces are given by Lagrange multipliers vector . Matrix Q, dened in (1.83), by means of which system constrained forces q c are expressed in (1.86), is usually called system constraint matrix. System constraint matrix is a one of the most important matrices in domain of dynamics of constrained multibody systems. By checking its rank it can be examined if a system is properly constrained i.e. if all constraints imposed on a system are independent or some of them are superuous. Number of independent constraints is equal to the rank of Q (see Chapter 1.2.3). System governing equations After insertion of (1.86) into (1.79), Newton-Euler equations of a constrained multibody system can be written in the form MH + qv = qa + QT . x (1.87)
Unlike Newton-Euler equations of a free multibody system (1.59), a set of the equations (1.87) can not be solved and integrated in time directly, since it contains q additional algebraic unknowns . To make a set of the equations (1.87) complete and solvable, kinematical constraint equations have to be added to mathematical model and considered simultaneously with Newton-Euler equations. With this aim in view, Newton-Euler equations (1.87) and q kinematical constraint equation (1.80) are grouped together, forming the governing equations of a constrained multibody systems MH + qv = qa + QT x
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
g(x, t) = 0 .
36 (1.88)
Equation (1.88) is 6p + q dimensional DAE system (DAE of index 3) that can be solved and integrated in time to obtain motion of a system (variables x , x , x) and c T system constraint forces q = Q . For numerical time integration, the specic solving procedures for DAE systems have to be used [1]. To utilize more convenient numerical procedure for integration, the governing equations of constrained multibody systems are very often formulated by using kinematical constraint equations at the acceleration level (equation (1.84)), instead of those formulated at the position level (Eq. (1.80)). In this way, the governing equations can be formulated in the form (6p + q dimensional DAE of index 1) MH + qv = qa + QT x Qx = c . (1.89)
A set of the equations (1.88) as well as the set (1.89) represent the governing equations of a constrained multibody system expressed in the full descriptor form. As it was already explained, by integrating (1.88) or (1.89) for a specied initial conditions x0 , x0 a systems motion as well as systems constraint forces can be determined. Because of inherent numerical instability of DAE system presented by (1.88) and (1.89), a numerical time integration of these equations is a challenging task which has to be treated very carefully [9]. Similarly as it was the case with Eq. (1.59), inertia matrix MH in Eq. (1.87) is a non-symetric one which makes time integration of (1.88) and (1.89) less efcient. As it was explained, premultiplication of (1.87) by HT symmetrise inertia matrix MH and brings (1.87) in the form HT MH + HT qv = HT qa + HT QT , x which can be integrated more efciently. Characteristics of mathematical model in full descriptor form Basic equations: Newton-Euler equations, constraint forces are included Absolute coordinates, 6 coordinates per body: Cartesian coordinates of the body mass centers and bodys Euler angles (or other parameters) Easy-to-obtain mathematical model, straightforward universal approach [18] (1.90)
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
37
Once mathematical model of the multibody system at hand is established, the model can be easily re-formulated if kinematical structure of a system is changed. Since kinematical structure of a system is reected within the governing equations only through the kinematical constraints equations g(x, t) = 0 and system constraint matrix Q (equation (1.83)), just these terms have to be changed/redened if a new kinematical conguration of the system is introduced (see also Fig. 1.12). Appropriate for forward and inverse dynamical problem Inverse dynamics All constraint and applied forces are included in the mathematical model and can be obtained by using standard procedures. Forward dynamics Model allows for determination of system motion and constraint forces simultaneously. Since model is based on the six coordinates per body, a position and orientation of each body are automatically calculated in the course of simulation. Appropriate for computer algorithms Model is easy to establish by using standard matrix algebra operations. It is suitable for implementation in general purpose multibody algorithms [21]. Characteristics of the equations Mathematical model in the full descriptor is expressed by DAE equations. DAE equations are generally more difcult to solve than ODE systems. Constraint violation stabilisation procedures are generally needed [4], [29], [30]. If it is required, governing equations expressed in full descriptor form can be reduced to mathematical model in minimal form (that represents equations of motion of a constrained multibody system) which will be described in the sequel.
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
M ATHEMATICAL
MODEL IN MINIMAL FORM
38
Reduction of model from full descriptor to minimal form In order to shape mathematical model in minimal form i.e. to establish equations of motion of a constrained multibody system, a minimal set of coordinates y, dim[y] = f (f = number of DOF), have to be chosen. By means of y, kinematical conguration of a system is uniquely described. A relation between system full descriptor absolute coordinates x = [xT xT ... xT ]T , dim[x] = 6p 1 1 2 p and a minimal form coordinates y, dim[y] = f , depends on system kinematical constraints equations and can be expressed explicitly by equation x = f (y, t) , (1.91)
(an implicit formulation (x, x, t) = 0 can be formulated as well). The corresponding equation at the velocity lavel takes form x= f f f = Jy + , y+ y t t (1.92)
and equation at the acceleration level reads as x = J + a , y where matrix J is given in the form J= f , dim[J] = 6p f . y (1.94) (1.93)
Matrix J is usually called Jacobian matrix. It is not unique but depends on a chosen set of coordinates by means of which a system kinematical conguration is described. It can be shown [20] that Jacobian matrix J has a property of being orthogonalcomplementary matrix to system constraint matrix Q. A relation between these two matrices can be expressed by QJ = JT QT = 0 . (1.95)
The orthogonality between matrices J and Q stems from the fact that these matrices span different subspaces which are mutually orthogonal. Namely, columns of transposed constraint matrix QT as well as Jacobian matrix J are vectors which form the basis of two vectorial subspaces: q-dimensional subspace of system constraint forces that is spanned by Q and f -dimensional subspace of system velocities, spanned by J.
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
39
The orthogonality given by (1.95) holds only for ideal mechanical systems and can be briey explained by the fact that system velocities are always orthogonal to system constraints. In analytical mechanics this is related to Jourdains principle which is based on virtual power. Other principles are dAlemberts principle, formulated by Lagrange on the basis of virtual work, and Gausss principle based on minimal constraints. The details of the introduced vectorial subspaces as well as strict mathematical proof are not given here and an interested reader is referred to the literature [4], [28]. By introducing equations (1.91), (1.92) and (1.93) into equation (1.87), NewtonEuler equations of constrained systems can be expressed via minimal set of coordinates y T MH (J + a) + qv = qa + Q y (1.96) where matrices that are expressed by a new set of coordinates are denoted by . Furthermore, if equation (1.96) is multiplied from the left side by transposed Jacobian matrix JT , two important effects will be achieved: elimination of constraint forces by means of orthogonality relation (1.95) (principle of virtual work), reduction of dimension of the equation from 6p to f . In this way, it can be written JT MH J + JT (MH a + qv ) = JT qa , y or in the short form Mgen y + qv = qa . gen gen In equation (1.96), generalised mass matrix is dened as Mgen = JT MH J , dim[Mgen ] = f f , vector of centrifugal, Coriolis and gyroscopic terms reads as qv = JT (MH a + qv ) , dim[qv ] = f 1 gen gen and vector of generalized applied forces is qa = JT qa , dim[qa ] = f 1 . gen gen (1.101) (1.100) (1.99) (1.98) (1.97)
A set of the equations (1.98) represents equations of motion of a constrained multibody system (mathematical model in minimal form, f -dimensional ODE sys tem). It can be integrated in time for given initial conditions y0 , y0 to obtain systems motion.
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
40
Since term of constraint forces QT vanishes from the governing equations due to the left multiplication by JT , it is obvious that this term has not to be formulated, if equations of motion are to be derived. Therefore, equations of motion (1.98) of a constrained system can be derived straightforwardly by formulating the matrices directly by means of (1.99), (1.100) and (1.101). Symmetrising inertia matrix Inertia matrix MH J in Eq.(1.96) has non-symetrical properties which may decrease signicantly an efciency of computation, as it was explained. Therefore, prior to elimination of constraint forces and reduction of dimension of (1.98), it may be advisable to symmetrise inertia matrix to improve an efciency of the integration procedure. This can be done by premultiplying Eq.(1.96) by HT . After elimination of constraint forces (additional premultiplication of (1.96) by JT ), Eq. (1.97) reads as JT HT MH J + JT HT (MH a + qv ) = JT HT qa . y (1.102)
Because of symmetric properties of inertia matrix JT HT MH , the equations of motion of a constrained multibody system (1.102) can be integrated more efciently. Lagrange equations of second kind Mathematical model in minimal form can also be derived using Lagrange equations of second kind. With this aim in view, a kinetic energy of the system
p
T =
i=1
1 1 T mi vi vi + T I i i 2 2 i
(1.103)
has to be determined. The expression in the bracket expresses a kinetic energy of the i-th body in a system [5]. By introduction of absolute position vector of the i-th body xi = [xT xT ]T Ti Ri (1.104)
and vector ti of the applied forces and torques, reduced to the i-th body mass centre ti = [fiT lT ]T , i Lagrange equations of second kind are given by d dt T y T = qa . gen y (1.106) (1.105)
In equation (1.106), a vector of generalized applied forces q a has the form gen qa = [q1 q2 ... qf ]T , gen (1.107)
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
with its coordinates qi =
i=1 p
41
tT i
xi yi
(1.108)
while y is a vector of the system minimal coordinates. By utilizing (1.106), mathematical model in minimal form (f -dimensional ODE system), which is equivalent to symmetrised minimal form (1.102) that is derived from the full descriptor form, can be obtained straightforwardly.
Governing equation (holonomic system) p...bodies, q...constraints, f...DOF + q* constraints
. . x+ f+y y
x + f(y) ; Full descriptor form 6p dynamical equations of the freebody diagram, 6p cartesian coordinates x q kinematical constraints equations f + 6p * q q + q* constraints f * = 6p (q + q*) f ; y
d dt
f y
Minimal form f equations of motion, f generalised coordinates y
f ; y*
d dt
f y*
Minimal form f * equations of motion, f *generalised coordinates y* f *t f
Figure 1.16: Modelling of system with additional kinematical constraints
Characteristics of mathematical model in minimal form Minimal number of generalised coordinates (the same number as DOF) The coordinates may be of absolute or relative type. Problem-dependent mathematical modelling A set of minimal coordinates appropriate to the problem at hand has to be chosen [15], [5].
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
42
A proper choice of coordinates gives opportunity for a more elegant modelling process as well as the model of a simpler mathematical structure. If solution has to be found numerically, a simpler structure of the model may lead to more accurate results. In order to formulate equations of motion, kinematical constraints are to be introduced and considered at the early stage of mathematical modelling. As a consequence, if equations of motion of a system with the changed kinematical structure (described by a different vector of the minimal coordinates y) have to be formulated, a new relation has to be established and new equations of motion completely re-derived, even if only a small change has been introduced [5]. This is illustrated in Fig. 1.16. Appropriate for forward dynamical problem. Appropriate for inverse dynamical problem, if only applied forces have to be determined. Forward dynamics Model allows for determination of a motion of the system. Since model is based on generalised coordinates given in minimal form, additional calculations are needed in order to determine position and orientation variables of each body in a system (additional calculation is based on the values of generalised coordinates and kinematical constraints equations). Inverse dynamics If only applied forces have to be determined, an utilization of minimal form model is plausible since computational procedure will not be unnecessarily burdened by the superuous coordinates and constraint forces. Since constraint forces do not appear in equations of motion, the equations of kinematical constraints have to be used if these forces are to be determined. Computer algorithms Lagrangian equations of second kind: less appropriate During generation of equation of motion, differentiation of the system energy terms is needed. This procedure is not so appropriate as to be efciently incorporated to a computational procedure (this holds especially for the large-scale systems).
CHAPTER 1. MECHANICAL AND MATHEMATICAL MODELLING
43
Newton-Euler equations and application of dAlemberts or Jourdains principle: reduction from full descriptor form is appropriate and leads to very effective algorithm The application of Gausss principle: appropriate, but not widely used Characteristics of equations Mathematical model in minimal form is expressed by ODE. Theory of ODE systems is very well established and there are numerous integration methods available for the particular simulation task [9]. Integration of ODE is generally a simpler computational task than integration of DAE systems. This is the main advantage of minimal form compared to the full descriptor form formulation. However, although integration of ODE systems can be considered as a straightforward procedure, ODE integration algorithm should be chosen with care to get a proper solution [9], [19].
BIBLIOGRAPHY (still incomplete)
299
[3] A. F. DSouza and V. K. Garg. Advanced Dynamics, Modeling and Analysis. Prentice-Hall International Editions, Englewood Cliffs, New Jersey, USA, 1984. [4] W. Schiehlen (ed.). Multibody Systems Handbook. Springer-Verlag, Berlin, Heidelberg, Germany, 1990. [5] W. Schiehlen (ed.). Advanced Multibody System Dynamics. Kluwer Academic Publishers, Dordrecht, The Netherlands, 1993. [6] R. Fletcher. Practical Methods of Optimization. John Wiley & Sons, Chichester, UK, 1987. [7] N. Gershenfeld. The Nature of Mathematical Modelling. University Press, Cambridge, 1999. [8] E. Hairer, S. P. Nrsett, and G. Wanner. Solving Ordinary Differential Equations I. Springer-Verlag, Berlin, Germany, 1987. [9] E. Hairer and G. Wanner. Solving Ordinary Differential Equations II. Springer-Verlag, Berlin, Germany, 1991. [10] J. L. Junkins and Youdan Kim. Introduction to Dynamics and Control of Flexible Structures. AIAA, American Institute of Aeronautics and Astronautics, Inc., Reston, VA, USA, 1993. [11] K. Kreuzer and W. Schiehlen. NEWEUL. 1988. (in German). [12] K. Magnus and H. H. Mller. Grundlagen der Technischen Mechanik. 1974. (in German). [13] P. C. Mller and W. O. Schiehlen. Linear Vibrations. Martinus Nijhoff Publishers, Dordrecht, The Netherlands, 1985. [14] Nattick. Control Toolbox Users Guide. The MathWorks, 1996. [15] D. E. Newland. Mechanical Vibration Analysis and Computation. Longman Scientic and Technical, Essex, England, 1989. [16] P. E. Nikravesh. Computer-Aided Analysis of Mechanical Systems. PrenticeHall International Editions, Englewood Cliffs, New Jersey, USA, 1988. [17] J. C. Polking. MATLAB Manual for Ordinary Differential Equations. PrenticeHall, Englewood Cliffs, NJ, USA, 1995. [18] W. Schiehlen. Technische Dynamik. 1986. (in German).
BIBLIOGRAPHY
(still incomplete)
300
[19] W. Schiehlen. Multibody system dynamics: Roots and perspectives. Multibody System Dynamics, 1:149188, 1997. [20] A. A. Shabana. Dynamics of Multibody Systems. John Wiley & Sons, New York, USA, 1989. [21] A. A. Shabana. Flexible multibody dynamics: Review of past and recent developments. Multibody System Dynamics, 1(3):189222, 1997. [22] Irving H. Shames. Engineering Mechanics. Statics and Dynamics. Prentice Hall, Upper Saddle River, New Jersey, USA, 1996. [23] V. Stejskal and M. Valek. Kinematics and Dynamics of Machinery. Marcel Dekker, Inc., New York, USA, 1996. [24] Z. Terze, D. Lefeber, and O. Mufti . Null space integration method for conc strained multibody systems with no constraint violation. Multibody System Dynamics, 2001. (in print). Kluwer Publishers, Vol. 6, No. 3, 2001, pp. 229-243.
Anda mungkin juga menyukai
- ADAMS Full Simulation Guide 2005Dokumen406 halamanADAMS Full Simulation Guide 2005Barkley80100% (2)
- Modeling Flexible Bodies Simscape Multibody 171122Dokumen39 halamanModeling Flexible Bodies Simscape Multibody 171122rcalienes0% (1)
- ANSYS Modal AnalysisDokumen40 halamanANSYS Modal AnalysisR.S.Vishwakarma5904Belum ada peringkat
- BOOK Karnopp Dean C. - Vehicle Dynamics, Stability, and Control, Second EditionDokumen320 halamanBOOK Karnopp Dean C. - Vehicle Dynamics, Stability, and Control, Second EditionJulian GenovBelum ada peringkat
- Learn Dynamic Analysis With Altair OptiStruct EbookDokumen159 halamanLearn Dynamic Analysis With Altair OptiStruct Ebookk krishna chaitanyaBelum ada peringkat
- Toyota GD Series Diesel Engines: Eugenio, 77Dokumen16 halamanToyota GD Series Diesel Engines: Eugenio, 77Sutikno100% (4)
- Chapter 2 Axial and Torsional ElementsDokumen57 halamanChapter 2 Axial and Torsional ElementsAhmad FaidhiBelum ada peringkat
- Analysis in AdamsDokumen5 halamanAnalysis in AdamsProduct DominixBelum ada peringkat
- MSC ADAMS - Student GuideDokumen332 halamanMSC ADAMS - Student GuideaychiluhimhailuBelum ada peringkat
- ANSYS Mechanical APDL Multibody Analysis Guide 18.2Dokumen72 halamanANSYS Mechanical APDL Multibody Analysis Guide 18.2Panda HeroBelum ada peringkat
- Simpack Off-Line and Real Time SimulationDokumen23 halamanSimpack Off-Line and Real Time SimulationAnderson ZambrzyckiBelum ada peringkat
- Intro To HypermeshDokumen35 halamanIntro To HypermeshAryan GuptaBelum ada peringkat
- A Study Guide: Released 2nd Edition 09/2018Dokumen159 halamanA Study Guide: Released 2nd Edition 09/2018vinod reddy mBelum ada peringkat
- 2 MultiBody DynamicsDokumen22 halaman2 MultiBody Dynamicsbiruk1Belum ada peringkat
- FSAE Design and OptimizationDokumen51 halamanFSAE Design and OptimizationLizHuangBelum ada peringkat
- Finite Element Analysis of Fatigue Life of Suspension Coil SpringDokumen6 halamanFinite Element Analysis of Fatigue Life of Suspension Coil SpringSameer SinghBelum ada peringkat
- Module 1 Part 1 Engine DynamicsDokumen57 halamanModule 1 Part 1 Engine DynamicsTara GerdingBelum ada peringkat
- Finite-Element-Analysis-Course AssemetDokumen16 halamanFinite-Element-Analysis-Course AssemetSelvamuthu KumaranBelum ada peringkat
- The Multibody Dynamics Module User's GuideDokumen94 halamanThe Multibody Dynamics Module User's Guidestallone21Belum ada peringkat
- Fatigue Life Prediction of Lower Suspension Arm Using Strain-Life ApproachDokumen15 halamanFatigue Life Prediction of Lower Suspension Arm Using Strain-Life Approachabraham silva hernandezBelum ada peringkat
- Active Suspension System of Quarter CarDokumen70 halamanActive Suspension System of Quarter CarMarcu SorinBelum ada peringkat
- 2015 Composites Lab2Dokumen28 halaman2015 Composites Lab2Lê Ngọc-HàBelum ada peringkat
- Professor Dr. Hubert Hahn (Auth.) - Rigid Body Dynamics of Mechanisms - 1 Theoretical Basis-Springer-Verlag Berlin Heidelberg (2002) PDFDokumen345 halamanProfessor Dr. Hubert Hahn (Auth.) - Rigid Body Dynamics of Mechanisms - 1 Theoretical Basis-Springer-Verlag Berlin Heidelberg (2002) PDFWender100% (1)
- Precision Motion Systems: Modeling, Control, and ApplicationsDari EverandPrecision Motion Systems: Modeling, Control, and ApplicationsBelum ada peringkat
- FRP Fish TanksDokumen33 halamanFRP Fish TanksA.Subin DasBelum ada peringkat
- Fiber Optic CablesDokumen24 halamanFiber Optic CablesARCC2030Belum ada peringkat
- Modelling and Simulation of Half Car Suspension System With A MRDDokumen6 halamanModelling and Simulation of Half Car Suspension System With A MRDgurudev001Belum ada peringkat
- Multi Body Dynamics Module Users GuideDokumen120 halamanMulti Body Dynamics Module Users GuidemechBelum ada peringkat
- Quarter Car Model Paper - AU-009 PDFDokumen7 halamanQuarter Car Model Paper - AU-009 PDFVictoria HicksBelum ada peringkat
- EGMN 420 001 32729 CAE Design Syllabus 2017.08.23 221700Dokumen65 halamanEGMN 420 001 32729 CAE Design Syllabus 2017.08.23 221700Curro Espadafor Fernandez AmigoBelum ada peringkat
- ANSYS Multibody AnalysisDokumen74 halamanANSYS Multibody AnalysisPaul NewmanBelum ada peringkat
- GEN CHEM 2 LESSON 3 Intermolecular Forces of Solids and Their Properties1.1Dokumen27 halamanGEN CHEM 2 LESSON 3 Intermolecular Forces of Solids and Their Properties1.1Loraine Castro0% (1)
- L01 - ANSYS - WB - LS-DYNA - Explicit Dynamics BasicsDokumen47 halamanL01 - ANSYS - WB - LS-DYNA - Explicit Dynamics BasicsNguyễn Hoàng ThịnhBelum ada peringkat
- The Structural Mechanics Module User's GuideDokumen430 halamanThe Structural Mechanics Module User's Guidestallone21Belum ada peringkat
- Nastran 2016.10Dokumen216 halamanNastran 2016.10bsiva123Belum ada peringkat
- SIMPACK Basics Training 1Dokumen58 halamanSIMPACK Basics Training 1df100% (1)
- SEC StdsDokumen65 halamanSEC Stdserson1981Belum ada peringkat
- Computational Methods in Nonlinear Structural and Solid Mechanics: Papers Presented at the Symposium on Computational Methods in Nonlinear Structural and Solid MechanicsDari EverandComputational Methods in Nonlinear Structural and Solid Mechanics: Papers Presented at the Symposium on Computational Methods in Nonlinear Structural and Solid MechanicsAhmed K. NoorBelum ada peringkat
- Solution To Engineering Problems Using Finite Element MethodDokumen39 halamanSolution To Engineering Problems Using Finite Element Methodahmet mehmetBelum ada peringkat
- Introduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsDari EverandIntroduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsBelum ada peringkat
- CAEfatigue Use CasesDokumen10 halamanCAEfatigue Use Casesgaurav patilBelum ada peringkat
- SIMPACK Academy MBS ContentDokumen4 halamanSIMPACK Academy MBS ContentCarlos Gustavo MéndezBelum ada peringkat
- Modelling of Mechanical Systems: Structural ElementsDari EverandModelling of Mechanical Systems: Structural ElementsPenilaian: 4 dari 5 bintang4/5 (1)
- 9365Dokumen69 halaman9365Kivanc NEROGLUBelum ada peringkat
- Multiphysics Modeling: Numerical Methods and Engineering Applications: Tsinghua University Press Computational Mechanics SeriesDari EverandMultiphysics Modeling: Numerical Methods and Engineering Applications: Tsinghua University Press Computational Mechanics SeriesPenilaian: 5 dari 5 bintang5/5 (1)
- Moving and Repeating Load in APDL PDFDokumen4 halamanMoving and Repeating Load in APDL PDFmanuel_9_4Belum ada peringkat
- NFEM Ch01 PDFDokumen15 halamanNFEM Ch01 PDFmadhuBelum ada peringkat
- Techniques For Engine Mount Modeling and OptimizationDokumen164 halamanTechniques For Engine Mount Modeling and OptimizationSwapnil NarnavareBelum ada peringkat
- Analytical DynamicsDokumen731 halamanAnalytical DynamicsCeleste Romero LongarBelum ada peringkat
- Multibody Dynamics ExplainDokumen28 halamanMultibody Dynamics ExplainYosef Safi HarbBelum ada peringkat
- Vehicle Dynamics Tutorial - 1Dokumen46 halamanVehicle Dynamics Tutorial - 1Girish ChandranBelum ada peringkat
- ANSYS Users Group - Hyperelastic MaterialsDokumen39 halamanANSYS Users Group - Hyperelastic Materialsresetalex100% (1)
- Non-Linear Finite Element Method For Solids: Lecture Notes For The Course 4K440Dokumen76 halamanNon-Linear Finite Element Method For Solids: Lecture Notes For The Course 4K440Pablo Tobar PalmaBelum ada peringkat
- Abaqus-Excite Workflow in Automotive Powertrain AnalysisDokumen12 halamanAbaqus-Excite Workflow in Automotive Powertrain AnalysisDmitry GrenishenBelum ada peringkat
- HyperMesh 11.0 Samcef TutorialsDokumen0 halamanHyperMesh 11.0 Samcef TutorialsAlexJDMBelum ada peringkat
- Multiaxial Life Predictions in Absence of Any Fatigue PropertiesDokumen11 halamanMultiaxial Life Predictions in Absence of Any Fatigue PropertiesAvinash BDBelum ada peringkat
- Subroutine MSC AdamsDokumen13 halamanSubroutine MSC Adamssubit0% (1)
- Simulation of Passive and Active SuspensionDokumen9 halamanSimulation of Passive and Active SuspensionAshish Parihar100% (1)
- MSC Training Course - Comprehensive Adams Training June 2014Dokumen5 halamanMSC Training Course - Comprehensive Adams Training June 2014tejashraj93Belum ada peringkat
- IJREI - Vibration Analysis and Response Characteristics of A Half Car Model Subjected To Different Sinusoidal Road ExcitationDokumen6 halamanIJREI - Vibration Analysis and Response Characteristics of A Half Car Model Subjected To Different Sinusoidal Road ExcitationIjrei JournalBelum ada peringkat
- An Integrated Approach For Transient Rolling of Tires 2003Dokumen1 halamanAn Integrated Approach For Transient Rolling of Tires 2003SIMULIACorpBelum ada peringkat
- Le Van Sy PHD Thesis PDFDokumen205 halamanLe Van Sy PHD Thesis PDFNhan LeBelum ada peringkat
- Modern Practice in Stress and Vibration Analysis: Proceedings of the Conference Held at the University of Liverpool, 3–5 April 1989Dari EverandModern Practice in Stress and Vibration Analysis: Proceedings of the Conference Held at the University of Liverpool, 3–5 April 1989J. E. MottersheadBelum ada peringkat
- Advanced Computational and Design Techniques in Applied Electromagnetic Systems: Proceedings of the International ISEM Symposium on Advanced Computational and Design Techniques in Applied Electromagnetic Systems, Seoul, Korea, 22-24 June, 1994Dari EverandAdvanced Computational and Design Techniques in Applied Electromagnetic Systems: Proceedings of the International ISEM Symposium on Advanced Computational and Design Techniques in Applied Electromagnetic Systems, Seoul, Korea, 22-24 June, 1994Belum ada peringkat
- Sec 6Dokumen8 halamanSec 6Limitless AyodejiBelum ada peringkat
- Owners Manual Dominar 250Dokumen52 halamanOwners Manual Dominar 250RaghavBelum ada peringkat
- Table StructureDokumen180 halamanTable StructureVictor PathakBelum ada peringkat
- Calculating The Maximum Attenuation For Optical Fiber LinksDokumen5 halamanCalculating The Maximum Attenuation For Optical Fiber LinksMiguel LiceagaBelum ada peringkat
- Digital Joints Solutions - Sep-2016-CatalogueDokumen102 halamanDigital Joints Solutions - Sep-2016-CatalogueiamlpBelum ada peringkat
- Copeland Cr28k6 PFV Recip Compressor Technical Specifications2Dokumen1 halamanCopeland Cr28k6 PFV Recip Compressor Technical Specifications2PerezBelum ada peringkat
- Specification For Construction of Concrete ReservoirsDokumen18 halamanSpecification For Construction of Concrete ReservoirsKeysha ApriliaBelum ada peringkat
- Auto Plin Schema Zapojeni Prepinace Autronic As 101Dokumen28 halamanAuto Plin Schema Zapojeni Prepinace Autronic As 101Tom TalicniBelum ada peringkat
- Developer For System Z: Quick Start GuideDokumen2 halamanDeveloper For System Z: Quick Start GuideUmesha GowdaBelum ada peringkat
- Technical Delivery Condition of S500MCDokumen4 halamanTechnical Delivery Condition of S500MCdcevipin100% (1)
- Qualcomm Extensible Diagnostic MonitorDokumen2 halamanQualcomm Extensible Diagnostic MonitorGuilherme Pereira0% (1)
- LY IR9000 BGA Rework Station User GuideDokumen4 halamanLY IR9000 BGA Rework Station User GuidemariabaccaroBelum ada peringkat
- MeshMolder HelpDokumen2 halamanMeshMolder HelpKarlay SouzaBelum ada peringkat
- Catalogo TiboxDokumen5 halamanCatalogo Tiboxfabiola100% (1)
- Mixed Grabar b2Dokumen1 halamanMixed Grabar b2lynBelum ada peringkat
- Precast Capping Beam Formers DatasheetDokumen2 halamanPrecast Capping Beam Formers Datasheetsantoshgpr100% (1)
- Annex 1 - Air Dryer Duct DRG List - 140717Dokumen1 halamanAnnex 1 - Air Dryer Duct DRG List - 140717vemanreddy29Belum ada peringkat
- Chapter 8 PDFDokumen93 halamanChapter 8 PDF김민성Belum ada peringkat
- ReleaseNotes MimicsMedical 21.0Dokumen24 halamanReleaseNotes MimicsMedical 21.0陳司瀚Belum ada peringkat
- TransformerDokumen14 halamanTransformerNegrea Cristian0% (3)
- Andreki, P. (2016) - Exploring Critical Success Factors of Construction Projects.Dokumen12 halamanAndreki, P. (2016) - Exploring Critical Success Factors of Construction Projects.beast mickeyBelum ada peringkat
- Free Gear Calculator - KHK GearsDokumen5 halamanFree Gear Calculator - KHK GearslawlawBelum ada peringkat
- Catalogo. Aparatos de Maniobra y Proteccion - Sirius. Siemens PDFDokumen52 halamanCatalogo. Aparatos de Maniobra y Proteccion - Sirius. Siemens PDFPedro MalpicaBelum ada peringkat
- FC-M6100 SM-BB52: DEORE CranksetDokumen1 halamanFC-M6100 SM-BB52: DEORE CranksetDon JonesBelum ada peringkat
- Hiab Knuckle Boom Articulating Cranes Spec 54f3f3Dokumen5 halamanHiab Knuckle Boom Articulating Cranes Spec 54f3f3Quỳnh Như Nguyễn ThịBelum ada peringkat