Anda mungkin juga menyukai
- Promt MidjourneyDokumen2 halamanPromt MidjourneyMarcelo PaixaoBelum ada peringkat
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsDari EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsPenilaian: 3.5 dari 5 bintang3.5/5 (3)
- PID Controller Working Principle Explained For BeginnersDokumen6 halamanPID Controller Working Principle Explained For BeginnersPramillaBelum ada peringkat
- Journal Approval WorkflowDokumen46 halamanJournal Approval Workflowvarachartered283Belum ada peringkat
- Zf6 6r60 Zip BookletDokumen8 halamanZf6 6r60 Zip BookletPablo Farfan Alvarez100% (1)
- Control Lab Project ReportDokumen28 halamanControl Lab Project ReportDanyal QamarBelum ada peringkat
- Instruction Manual: Pid Based Pressure Loop TrainerDokumen28 halamanInstruction Manual: Pid Based Pressure Loop TrainerKiran BennyBelum ada peringkat
- Control of DC Motor Using Different Control StrategiesDari EverandControl of DC Motor Using Different Control StrategiesBelum ada peringkat
- 300B Parallel SET AmplifierDokumen8 halaman300B Parallel SET Amplifierandree wBelum ada peringkat
- P, I, D, PI, PD, and PID ControlDokumen14 halamanP, I, D, PI, PD, and PID ControlArnav KothiyalBelum ada peringkat
- The Working Principle of A PID Controller For BeginnersDokumen15 halamanThe Working Principle of A PID Controller For BeginnersSaber AbdelaalBelum ada peringkat
- PID ControlDokumen22 halamanPID ControlJessica RossBelum ada peringkat
- Pid Control ch8 PDFDokumen22 halamanPid Control ch8 PDFGholamreza IlkhaniBelum ada peringkat
- Pid Without A PHD PDFDokumen14 halamanPid Without A PHD PDFGiovanni Eliezer100% (2)
- Chapter 2: Optimum Controller Chapter 2: Optimum Controller Settings Settings GGDokumen5 halamanChapter 2: Optimum Controller Chapter 2: Optimum Controller Settings Settings GGLakshmiBelum ada peringkat
- BenchtopPIDController WhPaperDokumen26 halamanBenchtopPIDController WhPaperfirosekhanBelum ada peringkat
- Discrete PID Controller On tinyAVR and megaAVR DevicesDokumen10 halamanDiscrete PID Controller On tinyAVR and megaAVR DeviceskeisinhoBelum ada peringkat
- InTech-Pid Control TheoryDokumen17 halamanInTech-Pid Control TheoryAbner BezerraBelum ada peringkat
- Thermal Characteristics of Pid Controller Water HeaterDokumen10 halamanThermal Characteristics of Pid Controller Water HeaterEhab QabashBelum ada peringkat
- PID ReportDokumen38 halamanPID ReportNishiya Vijayan100% (1)
- Control Systems Background - The Regulation ProblemDokumen19 halamanControl Systems Background - The Regulation ProblemHilmy Pramuditya FhansuriBelum ada peringkat
- Design of Pid Controller For PLC: J. Paulusová, L. KörösiDokumen8 halamanDesign of Pid Controller For PLC: J. Paulusová, L. Körösiankit407Belum ada peringkat
- Mesb333 Pid ControlDokumen13 halamanMesb333 Pid ControlMohd KhairiBelum ada peringkat
- A Simple PID Controller With Adaptive Parameter in A DsPICDokumen5 halamanA Simple PID Controller With Adaptive Parameter in A DsPICAlfian Apin Ma'arifBelum ada peringkat
- PID ControllersDokumen6 halamanPID ControllersNguyễn HảiBelum ada peringkat
- Temperature Control Waterbath Control System Using PID ControllerDokumen5 halamanTemperature Control Waterbath Control System Using PID ControllerReno Sandy YusufBelum ada peringkat
- Lab 5 Reportgroup Name IdDokumen16 halamanLab 5 Reportgroup Name IdMelaku DinkuBelum ada peringkat
- Tuning of A PID Controller Using Ziegler-Nichols MethodDokumen7 halamanTuning of A PID Controller Using Ziegler-Nichols MethodTomKish100% (1)
- Group 4 Lab 5Dokumen16 halamanGroup 4 Lab 5Melaku DinkuBelum ada peringkat
- Special Nonlinear Pid ControllersDokumen25 halamanSpecial Nonlinear Pid ControllersawalmeidaBelum ada peringkat
- Experiment 9Dokumen9 halamanExperiment 9Ali AhmadBelum ada peringkat
- EE402 RecitationDokumen64 halamanEE402 Recitationvignesh0617Belum ada peringkat
- How Does A PID Controller Work - Structure & Tuning MethodsDokumen12 halamanHow Does A PID Controller Work - Structure & Tuning Methodsmurugan1984Belum ada peringkat
- PID Lab HandoutDokumen16 halamanPID Lab HandoutsteedBelum ada peringkat
- GUI Based Control System Analysis Using PID Controller For EducationDokumen11 halamanGUI Based Control System Analysis Using PID Controller For Educationpascal toguBelum ada peringkat
- Atmel 2558 Discrete PID Controller On TinyAVR and MegaAVR ApplicationNote AVR221Dokumen14 halamanAtmel 2558 Discrete PID Controller On TinyAVR and MegaAVR ApplicationNote AVR221Siti NoviyaniBelum ada peringkat
- EATHD-15022 (By Ravi Kumar Sahu)Dokumen4 halamanEATHD-15022 (By Ravi Kumar Sahu)B Widya OktariaBelum ada peringkat
- Fuzzy Pid BasicDokumen6 halamanFuzzy Pid BasichabbythomasaBelum ada peringkat
- Study of Fuzzy Logic and Pid Controller in Buck-Boost ConverterDokumen4 halamanStudy of Fuzzy Logic and Pid Controller in Buck-Boost ConverterijsretBelum ada peringkat
- Lecture2 3Dokumen25 halamanLecture2 3vrushalibhattBelum ada peringkat
- Design and Simulation of DA Based PID Controller Using Verilog CodingDokumen6 halamanDesign and Simulation of DA Based PID Controller Using Verilog Codingjamal2877Belum ada peringkat
- Temperature Control Water Bath System Using PID ControllerDokumen5 halamanTemperature Control Water Bath System Using PID Controllerprapya pokharelBelum ada peringkat
- Report ControlDokumen33 halamanReport Controlajwadalfatani100% (5)
- 21 THDokumen32 halaman21 THujjwal kumarBelum ada peringkat
- PID ControllersDokumen9 halamanPID Controllerszs94qjqcx7Belum ada peringkat
- Controllers and Thier Tuningclo2Dokumen31 halamanControllers and Thier Tuningclo2AreeshaBelum ada peringkat
- PID Theory From WikipediaDokumen7 halamanPID Theory From Wikipediaputra-tzuBelum ada peringkat
- EVMS Full Notes PDFDokumen78 halamanEVMS Full Notes PDFNaveen DhanurajBelum ada peringkat
- Lab11 - AutotuningDokumen26 halamanLab11 - AutotuningEng. Ebrahim A. AlrohmiBelum ada peringkat
- Lab11 - Autotuning PDFDokumen26 halamanLab11 - Autotuning PDFEng. Ebrahim A. AlrohmiBelum ada peringkat
- Real Time Speed Control of DC Motor With Unknown Transfer Function Through PIDDokumen6 halamanReal Time Speed Control of DC Motor With Unknown Transfer Function Through PIDArbab HaiderBelum ada peringkat
- PID ControlDokumen17 halamanPID ControlUma MageshwariBelum ada peringkat
- MX009 - Proportional Integral Derivative Control PDFDokumen5 halamanMX009 - Proportional Integral Derivative Control PDFjorgemdp5Belum ada peringkat
- Pid ThoryDokumen24 halamanPid ThoryPravin KumarBelum ada peringkat
- Auto Tuning of PID Controller For MIMO Processes: M. J. Lengare, R. H. Chile, L. M. Waghmare and Bhavesh ParmarDokumen4 halamanAuto Tuning of PID Controller For MIMO Processes: M. J. Lengare, R. H. Chile, L. M. Waghmare and Bhavesh ParmarDavid DebonoBelum ada peringkat
- Implementing A PID Controller Using A PICDokumen15 halamanImplementing A PID Controller Using A PICJavier CharrezBelum ada peringkat
- Report 2 (PID)Dokumen5 halamanReport 2 (PID)Araragi KoyomiBelum ada peringkat
- Lab 6 Engineering Measurement and Lab SampleDokumen11 halamanLab 6 Engineering Measurement and Lab Sampletk_atiqahBelum ada peringkat
- Pid Closed-Loop Control System Based On S7-300 PLC: LI Xin, LEI Ju-YangDokumen5 halamanPid Closed-Loop Control System Based On S7-300 PLC: LI Xin, LEI Ju-YangChethan GowdaBelum ada peringkat
- Priyanka RajputDokumen5 halamanPriyanka RajputajieBelum ada peringkat
- Advanced Techniques and Technology of Computer-Aided Feedback ControlDari EverandAdvanced Techniques and Technology of Computer-Aided Feedback ControlBelum ada peringkat
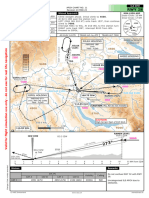
- LSZH Apch11 Rwy28 IlsDokumen1 halamanLSZH Apch11 Rwy28 Ilssamykarim2009Belum ada peringkat
- Sanghvi: Protein Self TestDokumen11 halamanSanghvi: Protein Self TestNewborn2013Belum ada peringkat
- Rigmaster 304 Stainless Steel Fluorescent LuminairesDokumen2 halamanRigmaster 304 Stainless Steel Fluorescent LuminairesErikaGaitanGonzalezBelum ada peringkat
- Aspect Oriented ArchitectureDokumen43 halamanAspect Oriented ArchitectureerzhanbaiBelum ada peringkat
- Irctcs E-Ticketing Service Electronic Reservation Slip (Personal User)Dokumen2 halamanIrctcs E-Ticketing Service Electronic Reservation Slip (Personal User)AmriteshbhaskarBelum ada peringkat
- Facility Details On DataCenterDokumen26 halamanFacility Details On DataCenterishtiaqkhurshid470Belum ada peringkat
- PrePeg XC110 210g 450gDokumen3 halamanPrePeg XC110 210g 450gPrakashChouhanBelum ada peringkat
- Coal JourneyDokumen2 halamanCoal JourneyasnandyBelum ada peringkat
- Vacuum WordDokumen31 halamanVacuum Wordion cristian OnofreiBelum ada peringkat
- Electronic Circuits - II Lab ManualDokumen26 halamanElectronic Circuits - II Lab Manualbalabasker100% (1)
- Ronalyn AramboloDokumen3 halamanRonalyn AramboloRonalyn AramboloBelum ada peringkat
- Sangfor NGAF Introduction 8.0.5 FinalDokumen24 halamanSangfor NGAF Introduction 8.0.5 FinalAlbarn Paul AlicanteBelum ada peringkat
- Parts List 01 255 07 96: Helical Gear Unit R107Dokumen3 halamanParts List 01 255 07 96: Helical Gear Unit R107Parmasamy Subramani50% (2)
- G 342 Engine Part 1 PDFDokumen26 halamanG 342 Engine Part 1 PDFharley florezBelum ada peringkat
- High Impact Papers in Power Engineering, 1900 1999: Celebration 2000Dokumen7 halamanHigh Impact Papers in Power Engineering, 1900 1999: Celebration 2000nooralhudBelum ada peringkat
- Compacted Graphite Iron Was First Patented at About The Same Time As Ductile Iron in The Late 1940Dokumen4 halamanCompacted Graphite Iron Was First Patented at About The Same Time As Ductile Iron in The Late 1940Agustin GerardoBelum ada peringkat
- Causes of Boiler Tube Leakage and MeasuresDokumen19 halamanCauses of Boiler Tube Leakage and MeasuresNhật TuấnBelum ada peringkat
- Mail Scanner - Community Ubuntu DocumentationDokumen4 halamanMail Scanner - Community Ubuntu DocumentationAjith PathiranaBelum ada peringkat
- PTX PRM PGL T5 750929eDokumen382 halamanPTX PRM PGL T5 750929eListiyo Imam SantosoBelum ada peringkat
- Pamphlet On Maintenance and Overhauling of Lightning ArresterDokumen10 halamanPamphlet On Maintenance and Overhauling of Lightning ArresterAjay Kumar PoulBelum ada peringkat
- SMAC CA12 BrochureDokumen2 halamanSMAC CA12 BrochureElectromateBelum ada peringkat
- Atm MachineDokumen7 halamanAtm MachineNguyen TungBelum ada peringkat
- Chapter 19 Malicious LogicDokumen16 halamanChapter 19 Malicious LogicAnita Sofia KeyserBelum ada peringkat
- Vacuum Gauges 45Dokumen20 halamanVacuum Gauges 45Sameeksha AnandBelum ada peringkat
- Model Space & Layout (Paper) SpaceDokumen7 halamanModel Space & Layout (Paper) SpaceIonela Lioara TutaBelum ada peringkat
- Walk inDokumen1 halamanWalk inCHATHURBelum ada peringkat