Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Ans MC0087Dokumen7 halamanAns MC0087SandboxtestBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Ans MC0086Dokumen8 halamanAns MC0086SandboxtestBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Ans MC0088Dokumen8 halamanAns MC0088SandboxtestBelum ada peringkat
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Ans MC0087Dokumen7 halamanAns MC0087SandboxtestBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Appellees Brief CIVILDokumen7 halamanAppellees Brief CIVILBenBulacBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Final Paper IN MAJOR 14 EL 116 Life and Death: Fear Reflected in John Green's The Fault in Our StarsDokumen12 halamanFinal Paper IN MAJOR 14 EL 116 Life and Death: Fear Reflected in John Green's The Fault in Our StarsMary Rose FragaBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- RFP On Internal AuditDokumen33 halamanRFP On Internal AuditCan dien tu Thai Binh DuongBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Sales OrganizationsDokumen12 halamanSales OrganizationsmohitmaheshwariBelum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- 2022BusinessManagement ReportDokumen17 halaman2022BusinessManagement ReportkianaBelum ada peringkat
- Role of Courts in Granting Bails and Bail Reforms: TH THDokumen1 halamanRole of Courts in Granting Bails and Bail Reforms: TH THSamarth VikramBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Interfaces and Inheritance in JavaDokumen1 halamanInterfaces and Inheritance in JavaegdejuanaBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Diagnosis: Acute GastroenteritisDokumen1 halamanDiagnosis: Acute GastroenteritisSakshi RanabhatBelum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Bird Beak ActivityDokumen4 halamanBird Beak Activityapi-314222661Belum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Geriatric AnaesthesiaDokumen24 halamanGeriatric Anaesthesiakarl abiaad100% (2)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Pakistan List of Approved Panel PhysicianssDokumen5 halamanPakistan List of Approved Panel PhysicianssGulzar Ahmad RawnBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
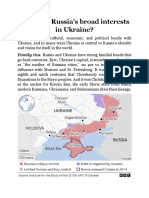
- What Are RussiaDokumen3 halamanWhat Are RussiaMuhammad SufyanBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Marketing Plan For Paraiso Islet ResortDokumen25 halamanMarketing Plan For Paraiso Islet ResortEllaine Claire Lor100% (1)
- Reaction PaperDokumen3 halamanReaction PaperCecille Robles San JoseBelum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Tamil Ilakkanam Books For TNPSCDokumen113 halamanTamil Ilakkanam Books For TNPSCkk_kamalakkannan100% (1)
- Assignment Submission Form: Pgid Name of The MemberDokumen9 halamanAssignment Submission Form: Pgid Name of The MemberNamit GaurBelum ada peringkat
- Answers To Case Studies 1a - 2dDokumen9 halamanAnswers To Case Studies 1a - 2dOgnen GaleskiBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- India Marine Insurance Act 1963Dokumen21 halamanIndia Marine Insurance Act 1963Aman GroverBelum ada peringkat
- Brochure 8 VT 8Dokumen24 halamanBrochure 8 VT 8David GonzalesBelum ada peringkat
- Cofee Table Book - Hayyan - Alef GroupDokumen58 halamanCofee Table Book - Hayyan - Alef GroupMustafa GelenovBelum ada peringkat
- IUGRDokumen4 halamanIUGRMichael Spica RampangileiBelum ada peringkat
- 7 - LESSON PLAN CULTURAL HERITAGE AND CULTURAL DIVERSITY - Lesson PlanDokumen4 halaman7 - LESSON PLAN CULTURAL HERITAGE AND CULTURAL DIVERSITY - Lesson PlanRute SobralBelum ada peringkat
- Rape and Challenging Contemporary ThinkingDokumen17 halamanRape and Challenging Contemporary ThinkingKirthna MadhavanBelum ada peringkat
- Got GottmanDokumen3 halamanGot GottmanaalcantaraBelum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Ang Tibay Vs CADokumen2 halamanAng Tibay Vs CAEarl LarroderBelum ada peringkat
- Darkness Points Reminder 2Dokumen2 halamanDarkness Points Reminder 2Tata YoyoBelum ada peringkat
- The Role of Personalization, Engagement and Trust in Online CommunitiesDokumen17 halamanThe Role of Personalization, Engagement and Trust in Online CommunitiesAbiBelum ada peringkat
- Radiography Safety ProcedureDokumen9 halamanRadiography Safety ProcedureأحمدآلزهوBelum ada peringkat
- De Thi Hoc Ki 2 Lop 3 Mon Tieng Anh Co File Nghe So 1Dokumen3 halamanDe Thi Hoc Ki 2 Lop 3 Mon Tieng Anh Co File Nghe So 1huong ngo theBelum ada peringkat
- Scipaper 7Dokumen2 halamanScipaper 7JL Serioso BalesBelum ada peringkat
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)