Anda mungkin juga menyukai
- Clima Desértico e Tropical SecoDokumen19 halamanClima Desértico e Tropical SecoLuís Miguel CardosoBelum ada peringkat
- Distância Mínima para Construir Nas MargensDokumen3 halamanDistância Mínima para Construir Nas MargensKRISTYAN VANNBATBelum ada peringkat
- Comparativo Da Matriz de Energia Elétrica - Brasil-usa-china-AlemanhaDokumen2 halamanComparativo Da Matriz de Energia Elétrica - Brasil-usa-china-AlemanhaAlexandre DuarteBelum ada peringkat
- O Impacto Do S&OP Na Gestão Integrada Do NegócioDokumen10 halamanO Impacto Do S&OP Na Gestão Integrada Do NegócioDavid SantoBelum ada peringkat
- Planejamento e Organização Do TrabalhoDokumen122 halamanPlanejamento e Organização Do TrabalhoLicitação NeoluzBelum ada peringkat
- Aula 03 - PEP I - Anexos - R00Dokumen4 halamanAula 03 - PEP I - Anexos - R00Wallace FariasBelum ada peringkat
- Carboidratos e LipideosDokumen2 halamanCarboidratos e LipideosANACUNHABelum ada peringkat
- NBR8400-3 - Arquivo para ImpressãoDokumen46 halamanNBR8400-3 - Arquivo para ImpressãoNei Carvalho67% (3)
- Resposta Acusacao JuriDokumen19 halamanResposta Acusacao JuriLuca ModricBelum ada peringkat
- Treinamento Operador de Betoneira - CompressDokumen14 halamanTreinamento Operador de Betoneira - CompressIgor FariasBelum ada peringkat
- Aprensentação Portorrol 2023Dokumen14 halamanAprensentação Portorrol 2023tratormaq pecasBelum ada peringkat
- Manual Rifle de Repetição 8122Dokumen13 halamanManual Rifle de Repetição 8122Vinicius HenriqueBelum ada peringkat
- Apostila PDFDokumen193 halamanApostila PDFIzabela MariaBelum ada peringkat
- Projeto Pedagógico FESP Faculdade de Engenharia SPDokumen105 halamanProjeto Pedagógico FESP Faculdade de Engenharia SProquemac100% (1)
- Yoga Do Sonhos e Do SonoDokumen2 halamanYoga Do Sonhos e Do Sonolucio100% (1)
- CartasDokumen8 halamanCartasNuno Ferreira MartinsBelum ada peringkat
- Como Funciona Iluminação de Quadras PoliesportivasDokumen4 halamanComo Funciona Iluminação de Quadras PoliesportivasRodrigo SeronBelum ada peringkat
- Heitor GalvaoDokumen18 halamanHeitor GalvaoGuilherme BatistaBelum ada peringkat
- Edital Moreno 2024Dokumen13 halamanEdital Moreno 2024Alexandre MedeirosBelum ada peringkat
- Alfabeto Grego ModernoDokumen3 halamanAlfabeto Grego ModernoJorge LuisBelum ada peringkat
- O Ego e Seus Mecanismos de DefesaDokumen6 halamanO Ego e Seus Mecanismos de DefesaガキアナBelum ada peringkat
- Matriz de Qualificação Live 5Dokumen13 halamanMatriz de Qualificação Live 5Carlos SantosBelum ada peringkat
- Livros Paradidáticos-2024Dokumen5 halamanLivros Paradidáticos-2024Alice SilvaBelum ada peringkat
- DistratoDokumen3 halamanDistratosamnsilva.ssBelum ada peringkat
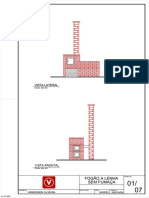
- Fogao A Lenha Sem Fumaça-1-7Dokumen7 halamanFogao A Lenha Sem Fumaça-1-7Felipe SantiagoBelum ada peringkat
- 4 Semana 29 Maio A 02 JunhoDokumen28 halaman4 Semana 29 Maio A 02 JunhoWagner SoaresBelum ada peringkat
- 02 Plano de Intervenção Aluno SurdoDokumen17 halaman02 Plano de Intervenção Aluno SurdoLucianoSchefferBelum ada peringkat
- Ficha Seguro AutomovelDokumen2 halamanFicha Seguro AutomovelDaiane Lopes100% (1)
- Pesquisa de MarketingDokumen26 halamanPesquisa de MarketingFabiola ZdepskiBelum ada peringkat
- QuestõesDokumen2 halamanQuestõesThauany MalekBelum ada peringkat