Anda mungkin juga menyukai
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasDari EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasPenilaian: 2.5 dari 5 bintang2.5/5 (3)
- Sintonia Del ControladorDokumen16 halamanSintonia Del ControladorJaronjer1Belum ada peringkat
- Previo Lab 8 Grupo ADokumen9 halamanPrevio Lab 8 Grupo AHenry Abdón CandiaBelum ada peringkat
- Lab P PI PIDDokumen10 halamanLab P PI PIDHumberto PachecoBelum ada peringkat
- Manuals7+infilink C YDokumen19 halamanManuals7+infilink C YErick CoronelBelum ada peringkat
- PI4 - Sistema de Control Del Nivel de Dos TanquesDokumen82 halamanPI4 - Sistema de Control Del Nivel de Dos TanquesPamela BarbozaBelum ada peringkat
- Ejercicio SimulacionDokumen5 halamanEjercicio SimulacionIvan LopezBelum ada peringkat
- Dimensionamiento de Conductores v1.1Dokumen11 halamanDimensionamiento de Conductores v1.1Lucho100% (1)
- Redes de Funciones de Base RadialDokumen26 halamanRedes de Funciones de Base RadialholgercorBelum ada peringkat
- Factor Correccion SSDH1382 2006Dokumen6 halamanFactor Correccion SSDH1382 2006Sergio Daniel Barea NuñezBelum ada peringkat
- Uclm Tema6 PDFDokumen14 halamanUclm Tema6 PDFSetinkBelum ada peringkat
- Lab de Escalamiento de Señales Análogas Usando La Instruccion SCLDokumen26 halamanLab de Escalamiento de Señales Análogas Usando La Instruccion SCLBenjhy Jordan Castillo Valera100% (1)
- Practica 7 Elec2Dokumen8 halamanPractica 7 Elec2Anthony CardenasBelum ada peringkat
- Teoría de Control UTMDokumen49 halamanTeoría de Control UTMJesus Colli100% (1)
- RS-232 RS-422 RS-485 Normas comunicación serialDokumen9 halamanRS-232 RS-422 RS-485 Normas comunicación serialnecforBelum ada peringkat
- Dinamica y Control de ProcesosDokumen7 halamanDinamica y Control de ProcesosAlfredo Silvi MellaBelum ada peringkat
- Uso de Entrada Analógica y Manejo de Display AlfanuméricoDokumen3 halamanUso de Entrada Analógica y Manejo de Display Alfanuméricouruk529Belum ada peringkat
- PLC IntermedioDokumen70 halamanPLC IntermedioMandrake26Belum ada peringkat
- Diseño de controladores para procesosDokumen12 halamanDiseño de controladores para procesosAugusto RadaelliBelum ada peringkat
- Instructivo de Configuración RSTPDokumen13 halamanInstructivo de Configuración RSTPWillian PalacioBelum ada peringkat
- Control Químicos ProcesosDokumen5 halamanControl Químicos ProcesosJennifer JohnsonBelum ada peringkat
- Ejercicios Temp y CaudalDokumen6 halamanEjercicios Temp y CaudalRafaRodriguezBelum ada peringkat
- Protocolo MODBUSDokumen3 halamanProtocolo MODBUSJan Carlos Espinoza GavilanBelum ada peringkat
- 01 MotivacionDokumen65 halaman01 MotivacionJorge FajardoBelum ada peringkat
- Control Sistemas EE615Dokumen2 halamanControl Sistemas EE615joserxBelum ada peringkat
- Análisis de La Respuesta en FrecuenciaDokumen45 halamanAnálisis de La Respuesta en FrecuenciaAnibalSanchezPBelum ada peringkat
- Análisis de respuesta transitoriaDokumen11 halamanAnálisis de respuesta transitoriaRichard GarciaBelum ada peringkat
- Control Nivel Agua LabView ArduinoDokumen7 halamanControl Nivel Agua LabView ArduinoFredy VeraBelum ada peringkat
- Re 10 Lab 248 Microprocesadores IIDokumen31 halamanRe 10 Lab 248 Microprocesadores IIMiguel Angel Coria CaveroBelum ada peringkat
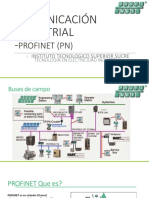
- ProfinetpnDokumen41 halamanProfinetpnLuisDavidStarkBelum ada peringkat
- 3.4.2 Laboratorio Administración de Un Servidor WebDokumen18 halaman3.4.2 Laboratorio Administración de Un Servidor WebalejoneyBelum ada peringkat
- ADC - LCD (PIC18f4550)Dokumen3 halamanADC - LCD (PIC18f4550)Israel Mendoza VelázquezBelum ada peringkat
- Banco de Entrenamiento en CalibracionDokumen25 halamanBanco de Entrenamiento en CalibracionJuan RodriguezBelum ada peringkat
- Plano de Planta SoquiborDokumen1 halamanPlano de Planta SoquiborcherBelum ada peringkat
- Concepto de Asignación de PolosDokumen6 halamanConcepto de Asignación de PolosClyo Alejandra VillalobosBelum ada peringkat
- TERMOCUPLADokumen9 halamanTERMOCUPLAAlex VillamarínBelum ada peringkat
- Criterios de control-ABB - Ppt.ppsDokumen88 halamanCriterios de control-ABB - Ppt.ppscristianBelum ada peringkat
- Parcial 2 EDII - I2020 PDFDokumen2 halamanParcial 2 EDII - I2020 PDFBrayan Stip AvendañoBelum ada peringkat
- 02 - Etapas de Salida de SensoresDokumen16 halaman02 - Etapas de Salida de SensoresCarlos HerreraBelum ada peringkat
- CAP 06 Estrategias de Control AvanzadasDokumen21 halamanCAP 06 Estrategias de Control Avanzadastravieso112Belum ada peringkat
- Grupo2 Preinf6Dokumen3 halamanGrupo2 Preinf6sebatianBelum ada peringkat
- Practica 7 Sist Med Temperatura Comp II pt100Dokumen2 halamanPractica 7 Sist Med Temperatura Comp II pt100Kevin Celis100% (1)
- General I Dad EsDokumen6 halamanGeneral I Dad Escarlos velasquez guzmanBelum ada peringkat
- Rectificador Trifasico Onda CompletaDokumen65 halamanRectificador Trifasico Onda CompletaJohan Silva CuevaBelum ada peringkat
- Sistemas de Control IDokumen226 halamanSistemas de Control IDiego SalasarBelum ada peringkat
- Gas Ypfb TransportesDokumen5 halamanGas Ypfb TransportesgabowinerBelum ada peringkat
- L01 - Transformada de FourierDokumen14 halamanL01 - Transformada de FourierJilmar Danilo Nunez ZegarraBelum ada peringkat
- Protocolos Industriales CIPDokumen48 halamanProtocolos Industriales CIPPaul EcheverríaBelum ada peringkat
- Códigos VHDLDokumen3 halamanCódigos VHDLFrida Sofía Andrade SierraBelum ada peringkat
- Control AutomáticoDokumen185 halamanControl Automáticochr2o100% (1)
- R-2R Ladder: Conversor digital analógico con red de resistenciasDokumen7 halamanR-2R Ladder: Conversor digital analógico con red de resistenciasSergio Limck PlnckkBelum ada peringkat
- Diseño y Estructura de Pic 18f877aDokumen26 halamanDiseño y Estructura de Pic 18f877aJhoel René Mamani HuancaBelum ada peringkat
- Pid Con Retardo de TransporteDokumen36 halamanPid Con Retardo de TransporteRichardBelum ada peringkat
- Instrumentación Industrial y P&idDokumen10 halamanInstrumentación Industrial y P&idAdrian OchoaBelum ada peringkat
- Digital Circuits - Cap 01 - UtecDokumen43 halamanDigital Circuits - Cap 01 - UteceddyBelum ada peringkat
- AAI HIAC02 HIAC02 PPT ControldeprocesosAutomatizados4Dokumen17 halamanAAI HIAC02 HIAC02 PPT ControldeprocesosAutomatizados4jaavieerkrilex jaaiestoBelum ada peringkat
- Etap - ModulosDokumen3 halamanEtap - Modulospercy_aragon_1Belum ada peringkat
- Guia 7Dokumen15 halamanGuia 7FabianBañoBelum ada peringkat
- Laboratorio de Control PidDokumen12 halamanLaboratorio de Control PidCarlos RamosBelum ada peringkat
- Calibración de controladores PID con métodos de Ziegler-Nichols y Chien-Hrones-ReswickDokumen14 halamanCalibración de controladores PID con métodos de Ziegler-Nichols y Chien-Hrones-ReswickArturo Hernández MoralesBelum ada peringkat
- Carta de RecomendaciónDokumen2 halamanCarta de RecomendaciónJoan Sebastian Ortiz Trujeque100% (1)
- G-012-05 Mantemento e LimpezaDokumen26 halamanG-012-05 Mantemento e Limpezatachoek7Belum ada peringkat
- Como Sigo Las Fases Del Ciclo Delproyecto PDFDokumen6 halamanComo Sigo Las Fases Del Ciclo Delproyecto PDFmacario_garcía_7Belum ada peringkat
- Unidad 3 Planeación de ProyectosDokumen18 halamanUnidad 3 Planeación de ProyectosDuvalincittha AcamBelum ada peringkat
- Escuela de PadresDokumen53 halamanEscuela de PadresGer Brenner100% (1)
- Formato de Reporte de PracticasDokumen6 halamanFormato de Reporte de PracticasJoan Sebastian Ortiz TrujequeBelum ada peringkat
- IntroducciónDokumen1 halamanIntroducciónJoan Sebastian Ortiz TrujequeBelum ada peringkat
- GuiaEXANI I2016Dokumen68 halamanGuiaEXANI I2016Zyomara K WhitmoreBelum ada peringkat
- IngleeesDokumen2 halamanIngleeesJoan Sebastian Ortiz TrujequeBelum ada peringkat
- Estudio de Tiempos y MovimientosDokumen47 halamanEstudio de Tiempos y Movimientosjrbudasai782464% (11)
- Tipos de ControladoresDokumen1 halamanTipos de ControladoresJoan Sebastian Ortiz TrujequeBelum ada peringkat
- Control CascadaDokumen16 halamanControl CascadaFerrito77100% (3)
- Dirección de Equipos de AR. Unidad IIDokumen39 halamanDirección de Equipos de AR. Unidad IIJoan Sebastian Ortiz TrujequeBelum ada peringkat
- T.4.a Equipos de Alto RendimientoDokumen20 halamanT.4.a Equipos de Alto RendimientoabelmerazBelum ada peringkat
- EstructurasDokumen62 halamanEstructurasErick Andrade'sBelum ada peringkat
- T.S.U. 2013 MT ElighDokumen3 halamanT.S.U. 2013 MT ElighJoan Sebastian Ortiz TrujequeBelum ada peringkat
- Lubricacion DesbloqueadoDokumen23 halamanLubricacion DesbloqueadoSunlight1708Belum ada peringkat
- RendimientoDokumen44 halamanRendimientoVere OrozcoBelum ada peringkat
- Motores Nema SiemensDokumen98 halamanMotores Nema SiemensFrancisco Campos FicaBelum ada peringkat
- If You Are A Sports FanDokumen1 halamanIf You Are A Sports FanJoan Sebastian Ortiz TrujequeBelum ada peringkat
- Equipos Alto RendimientoDokumen10 halamanEquipos Alto RendimientoJoan Sebastian Ortiz TrujequeBelum ada peringkat
- Estadistica DescriptivaDokumen38 halamanEstadistica DescriptivaellobodelacumbiaBelum ada peringkat
- EnsayoDokumen3 halamanEnsayoJoan Sebastian Ortiz TrujequeBelum ada peringkat
- Convewrtidor ADC 2Dokumen14 halamanConvewrtidor ADC 2Edson RodasBelum ada peringkat
- Como Sigo Las Fases Del Ciclo Delproyecto PDFDokumen6 halamanComo Sigo Las Fases Del Ciclo Delproyecto PDFmacario_garcía_7Belum ada peringkat
- Resumen de Donde Estan Las MonedasDokumen2 halamanResumen de Donde Estan Las MonedasJoan Sebastian Ortiz Trujeque100% (4)
- Teoria X e y Teoria Z PDFDokumen2 halamanTeoria X e y Teoria Z PDFAlberto CoronaBelum ada peringkat
- Como Sigo Las Fases Del Ciclo Delproyecto PDFDokumen6 halamanComo Sigo Las Fases Del Ciclo Delproyecto PDFmacario_garcía_7Belum ada peringkat
- EnsayoDokumen3 halamanEnsayoJoan Sebastian Ortiz TrujequeBelum ada peringkat
- Ortiz Trujeque Joan Sebastian 8a. Segunda RevisionDokumen58 halamanOrtiz Trujeque Joan Sebastian 8a. Segunda RevisionJoan Sebastian Ortiz TrujequeBelum ada peringkat
- Criptografia e Instalacion de XubuntuDokumen5 halamanCriptografia e Instalacion de Xubuntumepl_875597Belum ada peringkat
- Investigacion Documental Criptografia.Dokumen15 halamanInvestigacion Documental Criptografia.ariel candelarioBelum ada peringkat
- KNN: clasificación por vecinos cercanosDokumen4 halamanKNN: clasificación por vecinos cercanosAlfonso ReyBelum ada peringkat
- REGRESION Y CORRELACION MULTIPLEDokumen8 halamanREGRESION Y CORRELACION MULTIPLEldanielchivasBelum ada peringkat
- Metodos Numericos - Informe 01Dokumen33 halamanMetodos Numericos - Informe 01Carlos MejiaBelum ada peringkat
- Apuntes de ProbabilidadDokumen18 halamanApuntes de ProbabilidadVictor Miguel Chocano TorresBelum ada peringkat
- Metodo de La Falsa PosicionDokumen6 halamanMetodo de La Falsa PosicionMaryFannyLunaCalamaroBelum ada peringkat
- Simulación financiera preguntas múltiplesDokumen5 halamanSimulación financiera preguntas múltiplesandres araujo100% (3)
- Probabilidades y EstadísticaDokumen4 halamanProbabilidades y EstadísticaWladimir FloresBelum ada peringkat
- Método de Falsa Posición o Regla FalsaDokumen12 halamanMétodo de Falsa Posición o Regla FalsaLEONARDO ALEX QUISPE LAURABelum ada peringkat
- CriptografiaDokumen20 halamanCriptografiaGrizzelBelum ada peringkat
- Práctica Mat. Bas. Uni.# 6Dokumen4 halamanPráctica Mat. Bas. Uni.# 6Emely CedeñoBelum ada peringkat
- AlgebraDokumen6 halamanAlgebraDIEGO FERNANDO CADENA ARANGOBelum ada peringkat
- Lab1 PdsDokumen3 halamanLab1 PdsLeo De Onde Leonidas FuentesBelum ada peringkat
- Trabajo Final AutomatasDokumen7 halamanTrabajo Final Automatasnelsy.profe1012Belum ada peringkat
- Introduccion Al AlgebraDokumen14 halamanIntroduccion Al AlgebraAndres DiazBelum ada peringkat
- Problemas Métodos NumericosDokumen4 halamanProblemas Métodos NumericosLuis Vera50% (2)
- Investigación MseDokumen4 halamanInvestigación MseJonathan FloresBelum ada peringkat
- Tipos de SimulaciónDokumen2 halamanTipos de SimulaciónEdgar CabreraBelum ada peringkat
- Teorema de Castigliano en Viga A. Estructural Hibbeler 8va Ed. Problema F9-14Dokumen4 halamanTeorema de Castigliano en Viga A. Estructural Hibbeler 8va Ed. Problema F9-14Pablo BalladaresBelum ada peringkat
- Factorizacion LU - MatiasDokumen2 halamanFactorizacion LU - MatiaselrikoBelum ada peringkat
- Pendientes Tub PVCDokumen7 halamanPendientes Tub PVCFernando Díaz100% (1)
- Aproximaciones de Distribuciones de ProbabilidadDokumen16 halamanAproximaciones de Distribuciones de Probabilidadestefania rua mazoBelum ada peringkat
- Taller # 6 Interpolacion Numerica - Parte 1 PDFDokumen2 halamanTaller # 6 Interpolacion Numerica - Parte 1 PDFAntony Gregorio AbanBelum ada peringkat
- Estructuras-Discretas-II-SemestreDokumen7 halamanEstructuras-Discretas-II-SemestreAna Paula Viviana Garzón MendozaBelum ada peringkat
- Distribucion NormalDokumen11 halamanDistribucion NormalKAROLISBelum ada peringkat
- Problemas de ProbabilidadDokumen4 halamanProblemas de ProbabilidadJorge SolisBelum ada peringkat
- Sobreajuste OverfittingDokumen5 halamanSobreajuste OverfittingcisnerosmtzBelum ada peringkat
- Características de Los Números PseudoaleatoriosDokumen6 halamanCaracterísticas de Los Números PseudoaleatoriosAlonso BrionesBelum ada peringkat
- S09 S1-MaterialDokumen21 halamanS09 S1-MaterialJulioTorresYauri0% (1)