Anda mungkin juga menyukai
- Ladder Logic For PIC and AVRDokumen6 halamanLadder Logic For PIC and AVRTomás Totaro100% (1)
- PIC Microcontroller IntroductionDokumen81 halamanPIC Microcontroller Introductionpnlinh2850% (2)
- Introduction to 6800/6802 Microprocessor Systems: Hardware, Software and ExperimentationDari EverandIntroduction to 6800/6802 Microprocessor Systems: Hardware, Software and ExperimentationBelum ada peringkat
- Source. The Key To Oscillator Operation Is Positive Feedback. A Positive FeedbackDokumen11 halamanSource. The Key To Oscillator Operation Is Positive Feedback. A Positive FeedbackDrLaxya Singla100% (1)
- Tiva C Series LaunchPadDokumen152 halamanTiva C Series LaunchPadhuyvt01Belum ada peringkat
- Curso Pic24j60Dokumen173 halamanCurso Pic24j60Diojan Torres100% (1)
- AVR Lecture 2Dokumen72 halamanAVR Lecture 2Mahrukh Baloch100% (2)
- A Tutorial On HSPICEDokumen9 halamanA Tutorial On HSPICEthaderBelum ada peringkat
- GPIO ApplicationsDokumen73 halamanGPIO Applicationsbreismam alfonso rueda diazBelum ada peringkat
- HSPICEGuideDokumen45 halamanHSPICEGuideVinny LamBelum ada peringkat
- How To Implement Icsp™ Using Pic16F8X Flash Mcus: Author: Rodger Richey Microchip Technology IncDokumen8 halamanHow To Implement Icsp™ Using Pic16F8X Flash Mcus: Author: Rodger Richey Microchip Technology Incadil100% (1)
- STM32F407VGT General-Purpose I/Os (GPIO)Dokumen5 halamanSTM32F407VGT General-Purpose I/Os (GPIO)service informatiqueBelum ada peringkat
- STM32F10xxx SPI Application ExamplesDokumen11 halamanSTM32F10xxx SPI Application Examplessmb6111Belum ada peringkat
- Bootloader For Arduino Mega2560 PDFDokumen3 halamanBootloader For Arduino Mega2560 PDFsausenalex100% (2)
- In-Circuit Serial Programming - Picmicro Mid-Range Mcu Family PDFDokumen14 halamanIn-Circuit Serial Programming - Picmicro Mid-Range Mcu Family PDFMauro Vargas100% (2)
- Creating A PWM Signal Using A PIC 16F84Dokumen5 halamanCreating A PWM Signal Using A PIC 16F84saadettin100% (2)
- Easypic v7 Manual v104cDokumen38 halamanEasypic v7 Manual v104cjuan0537100% (1)
- Snubber Circuit Design MethodsDokumen7 halamanSnubber Circuit Design MethodsNikolas AugustoBelum ada peringkat
- Mplab X Ide: Be Sure To Check Out Microchip's New Integrated Development EnvironmentDokumen3 halamanMplab X Ide: Be Sure To Check Out Microchip's New Integrated Development Environmentescorp100% (1)
- MCES Group ActivityDokumen55 halamanMCES Group ActivitykartiksdanBelum ada peringkat
- Tutorials For STM32F103RB: Nicolas BarbotDokumen13 halamanTutorials For STM32F103RB: Nicolas BarbotcarBelum ada peringkat
- The Basics of Ethernet The Basics of Ethernet The Basics of Ethernet The Basics of EthernetDokumen6 halamanThe Basics of Ethernet The Basics of Ethernet The Basics of Ethernet The Basics of EthernetRupesh Kumar100% (1)
- (Kipp H.) GCC-AVR Inline Assembler Cookbook.V1.6Dokumen13 halaman(Kipp H.) GCC-AVR Inline Assembler Cookbook.V1.6ameer100% (1)
- Audio Player Using The PIC32, MCP4822, microSD Card and The MDDFS LibraryDokumen9 halamanAudio Player Using The PIC32, MCP4822, microSD Card and The MDDFS Librarytahmidmc100% (2)
- Introduction To The PIC32 - The Basics, Getting Started, IO Ports and The First ProgramDokumen17 halamanIntroduction To The PIC32 - The Basics, Getting Started, IO Ports and The First Programtahmidmc100% (5)
- PDF Edne Sept 2013Dokumen52 halamanPDF Edne Sept 2013torinomg100% (1)
- AVR Microcontroller: Prepared By: Eng. Ashraf DarwishDokumen28 halamanAVR Microcontroller: Prepared By: Eng. Ashraf DarwishHectorLopez100% (2)
- Q Choose PicDokumen72 halamanQ Choose Pichmltdt9221100% (2)
- Hspice Tutorial (2011)Dokumen48 halamanHspice Tutorial (2011)Mitchell LeeBelum ada peringkat
- Msp430 Adc12Dokumen40 halamanMsp430 Adc12Sunny SharmaBelum ada peringkat
- YOG-Gigabit EthernetDokumen50 halamanYOG-Gigabit EthernetArya Man100% (1)
- High-Performance PIC24 Microcontroller Family: 16-Bit MicrocontrollersDokumen6 halamanHigh-Performance PIC24 Microcontroller Family: 16-Bit MicrocontrollersptkienBelum ada peringkat
- 5.2 PWM 7 Mac 2017Dokumen34 halaman5.2 PWM 7 Mac 2017Elawarasi Nadarajan100% (1)
- DIY Electronics (HK) LTD PO Box 88458, Sham Shui Po, Hong KongDokumen17 halamanDIY Electronics (HK) LTD PO Box 88458, Sham Shui Po, Hong Kongrajudp100% (1)
- What Is The Difference Between Microcontrollers and 8051Dokumen6 halamanWhat Is The Difference Between Microcontrollers and 8051Erandi Brito100% (1)
- T89C51 Training Board - V5Dokumen44 halamanT89C51 Training Board - V5davidegrimaBelum ada peringkat
- How To Interfacing Sensor With LPC2148 ARMDokumen8 halamanHow To Interfacing Sensor With LPC2148 ARMSubir MaityBelum ada peringkat
- 7 Segment N LCDDokumen38 halaman7 Segment N LCDBaishakhi Bose100% (1)
- LCD 16 X 2Dokumen9 halamanLCD 16 X 2Pradeev Balakrishnan100% (1)
- 8051 - Micro ControllersDokumen33 halaman8051 - Micro ControllersRijo Jackson TomBelum ada peringkat
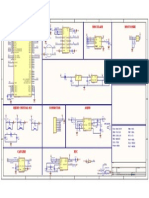
- Can Bus SCHDokumen1 halamanCan Bus SCHhoangdai100% (3)
- AVR Microcontroller: Prepared By: Eng. Ashraf DarwishDokumen27 halamanAVR Microcontroller: Prepared By: Eng. Ashraf DarwishHectorLopez100% (2)
- STM32 RS-485Dokumen12 halamanSTM32 RS-485mail87523Belum ada peringkat
- Comparison of Communication ProtocolDokumen2 halamanComparison of Communication Protocolvigneshwaran100% (2)
- Understanding The Modbus ProtocolDokumen7 halamanUnderstanding The Modbus ProtocolAshok Kumar100% (1)
- Microcontroller and Embedded SystemsDokumen2 halamanMicrocontroller and Embedded SystemsIndranilBelum ada peringkat
- Basics of The Communication ProtocolDokumen19 halamanBasics of The Communication ProtocolNEETHU PRAKASH100% (1)
- Brushless DC Electric Motor Control by CPLDDokumen6 halamanBrushless DC Electric Motor Control by CPLDIonela100% (3)
- Interfacing LCD To Arduino Display Text and Characters On LCD Screen Using ArduinoDokumen9 halamanInterfacing LCD To Arduino Display Text and Characters On LCD Screen Using ArduinoThomaselva100% (1)
- A Further Study Into The Use of The PIC32MX250F128B, With Side Projects Using The AT91SAM3X8E (Arduino Due) and The Intel GalileoDokumen15 halamanA Further Study Into The Use of The PIC32MX250F128B, With Side Projects Using The AT91SAM3X8E (Arduino Due) and The Intel Galileotahmidmc100% (2)
- By Marl Us: Lighting The Right To TheDokumen7 halamanBy Marl Us: Lighting The Right To TheGiancarloRichardRivadeneyraMiranda100% (1)
- Pic-Web Development Board Users Manual: Rev.A, July 2008Dokumen14 halamanPic-Web Development Board Users Manual: Rev.A, July 2008darazzi100% (1)
- Chapter 7 - Combinational DesignDokumen140 halamanChapter 7 - Combinational DesignVăn Nguyễn CôngBelum ada peringkat
- Digital Signal Processing Systems: Implementation Techniques: Advances in Theory and ApplicationsDari EverandDigital Signal Processing Systems: Implementation Techniques: Advances in Theory and ApplicationsBelum ada peringkat
- Oliver Theobald Machine LearningDokumen172 halamanOliver Theobald Machine LearningMuhammad amirBelum ada peringkat
- Data VisualizationDokumen17 halamanData VisualizationMahi SrivastavaBelum ada peringkat
- Python Notes 3rd McaDokumen99 halamanPython Notes 3rd McaarjunBelum ada peringkat
- 2-3 IT-505 Project Milestone OneDokumen7 halaman2-3 IT-505 Project Milestone OneJoe RodriguezBelum ada peringkat
- EHLLAPIDokumen3 halamanEHLLAPIfaizalghalibBelum ada peringkat
- AUTOSAR SWS DiagnosticEventManager-已解锁 120-125Dokumen6 halamanAUTOSAR SWS DiagnosticEventManager-已解锁 120-125965658391Belum ada peringkat
- Wanqing Li, Senior Programmer, Biostatistics, AmgenDokumen22 halamanWanqing Li, Senior Programmer, Biostatistics, AmgenNagakumaran SBelum ada peringkat
- PeopleSoft Interview QuestionsDokumen46 halamanPeopleSoft Interview Questionsnkravuri100% (1)
- Ch03 OS9eDokumen61 halamanCh03 OS9eMrinaalini SelvarajanBelum ada peringkat
- ISMDokumen8 halamanISMAbhijit Kar100% (1)
- Chapter One: Server Side Scripting BasicDokumen122 halamanChapter One: Server Side Scripting BasicBirhanu AberaBelum ada peringkat
- SQ L AlchemyDokumen9 halamanSQ L Alchemyroy.scar2196Belum ada peringkat
- Xpediter Batch: Class Handout For Batch COBOLDokumen122 halamanXpediter Batch: Class Handout For Batch COBOLvijaybolla0% (1)
- Iso 22900-3Dokumen460 halamanIso 22900-3EricBelum ada peringkat
- 3 Test03 Flow TestingDokumen35 halaman3 Test03 Flow TestingNanda AzharyBelum ada peringkat
- All-In-One D2K PDFDokumen123 halamanAll-In-One D2K PDFcsalas71Belum ada peringkat
- CS401 MCQs Collection BY SONU MUGHALDokumen190 halamanCS401 MCQs Collection BY SONU MUGHALM. HassanBelum ada peringkat
- 3 - Functions & Strings + AnswersDokumen8 halaman3 - Functions & Strings + AnswersMohammad Mohsen AmiriBelum ada peringkat
- SAP Enhancements: - Bhavannarayana .SDokumen69 halamanSAP Enhancements: - Bhavannarayana .SGaurav SharmaBelum ada peringkat
- 8051 InstructionsDokumen24 halaman8051 Instructionssasitharan33Belum ada peringkat
- Bernd Klein Python Data Analysis LetterDokumen514 halamanBernd Klein Python Data Analysis LetterRajaBelum ada peringkat
- Functions: Document Prepared byDokumen20 halamanFunctions: Document Prepared bySenthil RajBelum ada peringkat
- PlprocDokumen282 halamanPlprocjiahailiBelum ada peringkat
- Custom Log ShippingDokumen2 halamanCustom Log ShippingKiran PatilBelum ada peringkat
- PHP (Hypertext Preprocessor /personal Home Page)Dokumen96 halamanPHP (Hypertext Preprocessor /personal Home Page)Hambarde AtharvaBelum ada peringkat
- Basic Java Interview Questions 3Dokumen10 halamanBasic Java Interview Questions 3Jasneet OberaiBelum ada peringkat
- LightningDokumen155 halamanLightningNoel Ian SimboriosBelum ada peringkat
- Register Renaming: ECEN 6253 Advanced Digital Computer DesignDokumen7 halamanRegister Renaming: ECEN 6253 Advanced Digital Computer DesignCarlos GomezBelum ada peringkat
- Testing QTP NotesDokumen38 halamanTesting QTP NotesAbhishekBelum ada peringkat
- Logical Programming ParadigmDokumen6 halamanLogical Programming ParadigmSolomon BefrduBelum ada peringkat