Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Analysis of Electric Machinery Krause Manual Solution PDFDokumen2 halamanAnalysis of Electric Machinery Krause Manual Solution PDFKuldeep25% (8)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- UTP Student Industrial ReportDokumen50 halamanUTP Student Industrial ReportAnwar HalimBelum ada peringkat
- RTDM Admin Guide PDFDokumen498 halamanRTDM Admin Guide PDFtemp100% (2)
- Raupex Heating and Plumbing SystemsDokumen8 halamanRaupex Heating and Plumbing SystemsFrinaru CiprianBelum ada peringkat
- 2004 Radiant Heating CatalogDokumen47 halaman2004 Radiant Heating CatalogFrinaru CiprianBelum ada peringkat
- RAUPEX Radiant HeatingDokumen8 halamanRAUPEX Radiant HeatingFrinaru CiprianBelum ada peringkat
- PC Bedienteil EDokumen8 halamanPC Bedienteil EFrinaru CiprianBelum ada peringkat
- NOX TPA E DescriptionDokumen5 halamanNOX TPA E DescriptionFrinaru CiprianBelum ada peringkat
- Usage of Picture Monitoring System: - Protection Against Theft - Protection Against DamageDokumen11 halamanUsage of Picture Monitoring System: - Protection Against Theft - Protection Against DamageFrinaru CiprianBelum ada peringkat
- 4-Way Valve Wcon Delux-SZDokumen1 halaman4-Way Valve Wcon Delux-SZFrinaru CiprianBelum ada peringkat
- SIMS Install V4Dokumen21 halamanSIMS Install V4Frinaru CiprianBelum ada peringkat
- NOX Operation by PC Software: Content May Change Without Prior NoticeDokumen8 halamanNOX Operation by PC Software: Content May Change Without Prior NoticeFrinaru CiprianBelum ada peringkat
- Security Information Management System (SIMS)Dokumen39 halamanSecurity Information Management System (SIMS)Frinaru CiprianBelum ada peringkat
- SIMS Install V4Dokumen21 halamanSIMS Install V4Frinaru CiprianBelum ada peringkat
- NOX E Technical DataDokumen2 halamanNOX E Technical DataFrinaru CiprianBelum ada peringkat
- NOX TPA E DescriptionDokumen5 halamanNOX TPA E DescriptionFrinaru CiprianBelum ada peringkat
- NOX E DatasheetsDokumen12 halamanNOX E DatasheetsFrinaru CiprianBelum ada peringkat
- Program de Intretinere 2008Dokumen8 halamanProgram de Intretinere 2008Frinaru CiprianBelum ada peringkat
- America (GTC) House Snagging List 25.05.06 (West)Dokumen410 halamanAmerica (GTC) House Snagging List 25.05.06 (West)Frinaru CiprianBelum ada peringkat
- PP2121 3 Channel Input Output Unit PINDokumen4 halamanPP2121 3 Channel Input Output Unit PINFrinaru CiprianBelum ada peringkat
- FLD E DescriptionDokumen2 halamanFLD E DescriptionFrinaru CiprianBelum ada peringkat
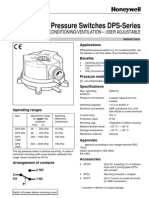
- Honeywell Diff P Switch DPSDokumen2 halamanHoneywell Diff P Switch DPSFrinaru CiprianBelum ada peringkat
- HVAC Procedures Forms ManualDokumen279 halamanHVAC Procedures Forms Manualgeneroso67100% (12)
- Honeywell Actuator M7410EDokumen6 halamanHoneywell Actuator M7410EFrinaru CiprianBelum ada peringkat
- Maintenance Program 2008Dokumen6 halamanMaintenance Program 2008Frinaru CiprianBelum ada peringkat
- Trane FWDDokumen12 halamanTrane FWDFrinaru CiprianBelum ada peringkat
- Honeywell Duct T SensorDokumen3 halamanHoneywell Duct T SensorFrinaru CiprianBelum ada peringkat
- Career Level Diagram - V5Dokumen1 halamanCareer Level Diagram - V5Shivani RaikwarBelum ada peringkat
- Traveling Salesman ProblemDokumen11 halamanTraveling Salesman ProblemdeardestinyBelum ada peringkat
- Lesson 5 Designing and Developing Social AdvocacyDokumen27 halamanLesson 5 Designing and Developing Social Advocacydaniel loberizBelum ada peringkat
- MGMT Audit Report WritingDokumen28 halamanMGMT Audit Report WritingAndrei IulianBelum ada peringkat
- Solved Simplex Problems PDFDokumen5 halamanSolved Simplex Problems PDFTejasa MishraBelum ada peringkat
- Howard R700X - SPL - INTDokumen44 halamanHoward R700X - SPL - INTJozsefBelum ada peringkat
- User Manual For Speed Control of BLDC Motor Using DspicDokumen12 halamanUser Manual For Speed Control of BLDC Motor Using DspicTrung TrựcBelum ada peringkat
- Module 1: Overview of Applied Behaviour Analysis (ABA)Dokumen37 halamanModule 1: Overview of Applied Behaviour Analysis (ABA)PriyaBelum ada peringkat
- (123doc) - Toefl-Reading-Comprehension-Test-41Dokumen8 halaman(123doc) - Toefl-Reading-Comprehension-Test-41Steve XBelum ada peringkat
- FAMOUS PP Past TenseDokumen21 halamanFAMOUS PP Past Tenseme me kyawBelum ada peringkat
- E0 UoE Unit 7Dokumen16 halamanE0 UoE Unit 7Patrick GutierrezBelum ada peringkat
- Crown WF-3000 1.2Dokumen5 halamanCrown WF-3000 1.2Qirat KhanBelum ada peringkat
- Salads: 300 Salad Recipes For Rapid Weight Loss & Clean Eating (PDFDrive) PDFDokumen1.092 halamanSalads: 300 Salad Recipes For Rapid Weight Loss & Clean Eating (PDFDrive) PDFDebora PanzarellaBelum ada peringkat
- Impact of Advertising On Consumers' Buying Behavior Through Persuasiveness, Brand Image, and Celebrity EndorsementDokumen10 halamanImpact of Advertising On Consumers' Buying Behavior Through Persuasiveness, Brand Image, and Celebrity Endorsementvikram singhBelum ada peringkat
- 3 Carbohydrates' StructureDokumen33 halaman3 Carbohydrates' StructureDilan TeodoroBelum ada peringkat
- Vendor Information Sheet - LFPR-F-002b Rev. 04Dokumen6 halamanVendor Information Sheet - LFPR-F-002b Rev. 04Chelsea EsparagozaBelum ada peringkat
- Tetralogy of FallotDokumen8 halamanTetralogy of FallotHillary Faye FernandezBelum ada peringkat
- BNF Pos - StockmockDokumen14 halamanBNF Pos - StockmockSatish KumarBelum ada peringkat
- Networker Performance Tuning PDFDokumen49 halamanNetworker Performance Tuning PDFHarry SharmaBelum ada peringkat
- Companyprofil E: Erfanconstructionsolut IonDokumen14 halamanCompanyprofil E: Erfanconstructionsolut IonNurin AleesyaBelum ada peringkat
- B. Geoinformatics PDFDokumen77 halamanB. Geoinformatics PDFmchakra720% (1)
- Parliament of India: Rajya SabhaDokumen64 halamanParliament of India: Rajya SabhaSivapothuraju KonathalaBelum ada peringkat
- Report On GDP of Top 6 Countries.: Submitted To: Prof. Sunil MadanDokumen5 halamanReport On GDP of Top 6 Countries.: Submitted To: Prof. Sunil MadanAbdullah JamalBelum ada peringkat
- CX Programmer Operation ManualDokumen536 halamanCX Programmer Operation ManualVefik KaraegeBelum ada peringkat
- Test ScienceDokumen2 halamanTest Sciencejam syBelum ada peringkat
- Chapter 1 ClassnotesDokumen35 halamanChapter 1 ClassnotesAllison CasoBelum ada peringkat
- 7400 IC SeriesDokumen16 halaman7400 IC SeriesRaj ZalariaBelum ada peringkat