Anda mungkin juga menyukai
- Subcooling & SuperheatDokumen3 halamanSubcooling & SuperheatMuhammadAmmarBelum ada peringkat
- Lambika YogaDokumen2 halamanLambika Yogavsyamkumar100% (3)
- Method Statement For Air & Water BalancingDokumen7 halamanMethod Statement For Air & Water BalancingKidesu Ramadhani100% (1)
- Hvac AhuDokumen33 halamanHvac AhuMark SantosBelum ada peringkat
- Cooling TowerDokumen23 halamanCooling TowerBevelyn L. Barreto HernandezBelum ada peringkat
- CLFM-50 KAPLAN TURBINE TEST RIG (Pitot Tube)Dokumen7 halamanCLFM-50 KAPLAN TURBINE TEST RIG (Pitot Tube)ErGiteshAroraBelum ada peringkat
- Plate Tectonics LessonDokumen3 halamanPlate Tectonics LessonChristy P. Adalim100% (2)
- Fluid Mechanics Lab Manual for Civil Engineering StudentsDokumen29 halamanFluid Mechanics Lab Manual for Civil Engineering Studentsvihangam yoga chandauli100% (1)
- Application Guide Loop Testing Techniques PDFDokumen2 halamanApplication Guide Loop Testing Techniques PDFkaliBelum ada peringkat
- Testing Hydro Power Plant Governors with Hardware-in-the-Loop SimulationsDokumen4 halamanTesting Hydro Power Plant Governors with Hardware-in-the-Loop Simulationsemilzaev01Belum ada peringkat
- Installation Guidelines For Wiring DevicesDokumen28 halamanInstallation Guidelines For Wiring DevicesaluismBelum ada peringkat
- Airconditioning Systems Introduction01Dokumen52 halamanAirconditioning Systems Introduction01ajBelum ada peringkat
- Power 2 Slides 2016Dokumen395 halamanPower 2 Slides 2016Ali BabaBelum ada peringkat
- Hydro Power Plant PresentationDokumen35 halamanHydro Power Plant PresentationM Hamza NadeemBelum ada peringkat
- Mechanical Vibration Solved ExamplesDokumen84 halamanMechanical Vibration Solved ExamplesParas Thakur92% (172)
- Experiment 7 DiagramDokumen7 halamanExperiment 7 Diagramartemio john claveBelum ada peringkat
- ECEN 667 Power System Stability: Lecture 13: Governors, PID ControllersDokumen45 halamanECEN 667 Power System Stability: Lecture 13: Governors, PID ControllersManuelBelum ada peringkat
- ATLAS CYLINDER LUBRICATOR MANUALDokumen36 halamanATLAS CYLINDER LUBRICATOR MANUALKaleb Z king webBelum ada peringkat
- Fluid Mechanics-I Laboratory Manual: Prepared By: Mr. Pradeep Kuhar Approved By: Mr. Gaurav TanwarDokumen30 halamanFluid Mechanics-I Laboratory Manual: Prepared By: Mr. Pradeep Kuhar Approved By: Mr. Gaurav TanwarAeronautical Engineering HODBelum ada peringkat
- Sluice Gate ExperimentDokumen1 halamanSluice Gate Experimenttewodros getuBelum ada peringkat
- Telecomm SwitchingDokumen49 halamanTelecomm SwitchingTalha KhalidBelum ada peringkat
- Lab 5 Bernoulli S DemoDokumen11 halamanLab 5 Bernoulli S DemoNando100% (1)
- The Role of Historical Cultural Memory in Uzbek Documentary CinemaDokumen5 halamanThe Role of Historical Cultural Memory in Uzbek Documentary CinemaResearch ParkBelum ada peringkat
- Laboratory Manual MEC-325 Thermo Fluid Engineering LaboratoryDokumen36 halamanLaboratory Manual MEC-325 Thermo Fluid Engineering LaboratoryArpit Kumar Jain100% (1)
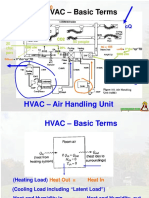
- (Heating Ventilation & Air Conditioning System) : Career Scope Course HighlightsDokumen2 halaman(Heating Ventilation & Air Conditioning System) : Career Scope Course HighlightsMilind KshirsagarBelum ada peringkat
- Revised LabDokumen18 halamanRevised LabAbu AyemanBelum ada peringkat
- Avanto Magnet System Error MessagesDokumen21 halamanAvanto Magnet System Error MessagesMuhammad Ahmad75% (4)
- 6A3 Russel ChilledWaterValvesDokumen21 halaman6A3 Russel ChilledWaterValvesAndyBelum ada peringkat
- PID Control of Heat Exchanger SystemDokumen6 halamanPID Control of Heat Exchanger SystemTuấn Anh Nguyễn100% (1)
- Measure Lift and Drag on an AirfoilDokumen11 halamanMeasure Lift and Drag on an AirfoilFanis VlazakisBelum ada peringkat
- 5 Parallel and Series Pump Operation 5Dokumen15 halaman5 Parallel and Series Pump Operation 5Omar AhmedBelum ada peringkat
- Chap 4Dokumen57 halamanChap 4Mohamed AbdelsalamBelum ada peringkat
- Force Balance Design For Educational Wind TunnelsDokumen10 halamanForce Balance Design For Educational Wind Tunnelsnarien kondamBelum ada peringkat
- Design of Helical Antennas For 433 MHZ Radio Telemetry Ground Station and Uav (Unmanned Aerial Vehicle)Dokumen7 halamanDesign of Helical Antennas For 433 MHZ Radio Telemetry Ground Station and Uav (Unmanned Aerial Vehicle)Tiara Nira SariBelum ada peringkat
- SOP GermanyDokumen4 halamanSOP GermanyAnkit SinghBelum ada peringkat
- Armfield - Instruction - Manual C6-MKII-10 Issue 6Dokumen38 halamanArmfield - Instruction - Manual C6-MKII-10 Issue 6azamatBelum ada peringkat
- Laboratory Teaching Exercises FM60 Impulse TurbineDokumen6 halamanLaboratory Teaching Exercises FM60 Impulse TurbineMintesnot AberaBelum ada peringkat
- Axial Flow Fan Test RigDokumen1 halamanAxial Flow Fan Test RigRahul TripathiBelum ada peringkat
- Daikin VRV Catalog 131014Dokumen84 halamanDaikin VRV Catalog 131014Parvez SaifBelum ada peringkat
- B7.2KENNEDYKILTECHIDEA Presentation Miami June 2013smallDokumen30 halamanB7.2KENNEDYKILTECHIDEA Presentation Miami June 2013smallSMBEAUTYBelum ada peringkat
- Control Lab Manual PDFDokumen40 halamanControl Lab Manual PDFKareem TarekBelum ada peringkat
- Hydro Elect Power Plant InstruDokumen148 halamanHydro Elect Power Plant InstruAnimesh JainBelum ada peringkat
- 100 Questions For IEEDokumen18 halaman100 Questions For IEEmusleh19Belum ada peringkat
- Manual PELTON PDFDokumen14 halamanManual PELTON PDFsyahirabdullahBelum ada peringkat
- Smoke TunnelDokumen55 halamanSmoke TunnelABHIMANYU KHADGABelum ada peringkat
- Chapter 6 - Hydraulic MachineryDokumen43 halamanChapter 6 - Hydraulic MachineryHalimi Honan100% (1)
- Understanding Pump Curves: Taco Radiant Made Easy Application Guide Technical DocumentsDokumen4 halamanUnderstanding Pump Curves: Taco Radiant Made Easy Application Guide Technical DocumentsmohdnazirBelum ada peringkat
- كتاب رائع فى BmsDokumen49 halamanكتاب رائع فى Bmsyasmenn2010Belum ada peringkat
- Frictional Losses in Circular PipeDokumen5 halamanFrictional Losses in Circular PipeVrushiket PatilBelum ada peringkat
- Psu 2015 Ashrae Isbd ReportDokumen34 halamanPsu 2015 Ashrae Isbd ReportJoydipto BoseBelum ada peringkat
- Flow Over An Airfoil - Pre-Analysis & Start-UpDokumen28 halamanFlow Over An Airfoil - Pre-Analysis & Start-Uppankaj216100% (1)
- TH35 Ejercicio ADokumen3 halamanTH35 Ejercicio ALuis CuzcoBelum ada peringkat
- Manhole Head LossesDokumen11 halamanManhole Head Lossesjoseph_mscBelum ada peringkat
- Heavy Duty Sluice Gates Quick ReferenceDokumen21 halamanHeavy Duty Sluice Gates Quick ReferencegraceBelum ada peringkat
- Experiment No. 6: TitleDokumen2 halamanExperiment No. 6: TitleKamran AliBelum ada peringkat
- Hydraulic Turbines: General Layout of Hydro-Electric Power PlantDokumen6 halamanHydraulic Turbines: General Layout of Hydro-Electric Power PlantnarendraidealBelum ada peringkat
- Cooling Tower DiscussionDokumen4 halamanCooling Tower DiscussionnamdohyonBelum ada peringkat
- 26 32 13.13 Diesel Engine GeneratorDokumen36 halaman26 32 13.13 Diesel Engine GeneratorDavid Rowland Droyce100% (1)
- ObjectivesDokumen7 halamanObjectivesPeeka booBelum ada peringkat
- PHE Control Mechanism PDFDokumen6 halamanPHE Control Mechanism PDFNaren VmdBelum ada peringkat
- Linea 24 & 28 Installation ManualDokumen64 halamanLinea 24 & 28 Installation Manualkhairul_ezadBelum ada peringkat
- Process Control LabDokumen25 halamanProcess Control LabShubhashish Bhakta100% (1)
- Experiment 8: Temperature Control: 8.1 Objective of The ExperimentDokumen11 halamanExperiment 8: Temperature Control: 8.1 Objective of The ExperimentHemavathy RtBelum ada peringkat
- Temperature Control TrainerDokumen31 halamanTemperature Control TrainerAjeet KumarBelum ada peringkat
- Linea 24 and 28 Installation and Servicing InstructionsDokumen64 halamanLinea 24 and 28 Installation and Servicing InstructionsdragonbeardBelum ada peringkat
- Heat Exchanger ExampleDokumen7 halamanHeat Exchanger ExampleBrian MasonBelum ada peringkat
- Matlab simulation of temperature control using PID and FLCDokumen5 halamanMatlab simulation of temperature control using PID and FLCwsa wsaBelum ada peringkat
- What Is Instrument Hook Up Diagram ? Instrument Hook Up Diagram Is Also Called Installation Drawing, Specifies The ScopeDokumen31 halamanWhat Is Instrument Hook Up Diagram ? Instrument Hook Up Diagram Is Also Called Installation Drawing, Specifies The ScopevrajakisoriDasiBelum ada peringkat
- Sample Cover Letter Computer ScienceDokumen1 halamanSample Cover Letter Computer ScienceAnkit SinghBelum ada peringkat
- Barrons 333 High Freq Words With Meanings PDFDokumen8 halamanBarrons 333 High Freq Words With Meanings PDFahmedhussien1Belum ada peringkat
- PNR Status Details: S# Booking Status Current StatusDokumen1 halamanPNR Status Details: S# Booking Status Current StatusAnkit SinghBelum ada peringkat
- Ee:eee::::eDokumen1 halamanEe:eee::::eAnkit SinghBelum ada peringkat
- Report PLCDokumen28 halamanReport PLCAnkit SinghBelum ada peringkat
- 10 1 1 9 7261Dokumen8 halaman10 1 1 9 7261Ankit SinghBelum ada peringkat
- Qualifications: Full NameDokumen2 halamanQualifications: Full NameAnkit SinghBelum ada peringkat
- David Purdy MTD QuestionsDokumen1 halamanDavid Purdy MTD QuestionsAnkit SinghBelum ada peringkat
- Full Name: Name of Last Job PositionDokumen2 halamanFull Name: Name of Last Job PositionAnkit SinghBelum ada peringkat
- Curriculum Vitae Template3 Green3Dokumen1 halamanCurriculum Vitae Template3 Green3Ankit SinghBelum ada peringkat
- Full Name: Name of Last Job PositionDokumen2 halamanFull Name: Name of Last Job PositionAnkit SinghBelum ada peringkat
- Fiber Optics Project ReportDokumen8 halamanFiber Optics Project ReportAnkit SinghBelum ada peringkat
- Modul English For Study SkillsDokumen9 halamanModul English For Study SkillsRazan Nuhad Dzulfaqor razannuhad.2020Belum ada peringkat
- Lect 1.2 Principles of Food Process DesignDokumen43 halamanLect 1.2 Principles of Food Process Designmahmoud hassanBelum ada peringkat
- Bimbo Marketing ResearchDokumen27 halamanBimbo Marketing Researcheman.konsouhBelum ada peringkat
- Participatory Assessment of Ragay Gulf Resources and SocioeconomicsDokumen167 halamanParticipatory Assessment of Ragay Gulf Resources and SocioeconomicsCres Dan Jr. BangoyBelum ada peringkat
- Specification: F.V/Tim e 3min 5min 8min 10MIN 15MIN 20MIN 30MIN 60MIN 90MIN 1.60V 1.67V 1.70V 1.75V 1.80V 1.85VDokumen2 halamanSpecification: F.V/Tim e 3min 5min 8min 10MIN 15MIN 20MIN 30MIN 60MIN 90MIN 1.60V 1.67V 1.70V 1.75V 1.80V 1.85VJavierBelum ada peringkat
- Biology 11th Edition Mader Test BankDokumen25 halamanBiology 11th Edition Mader Test BankAnthonyWeaveracey100% (44)
- 1.an Overview On Membrane Strategies For Rare Earths Extraction and Separation - 2017Dokumen36 halaman1.an Overview On Membrane Strategies For Rare Earths Extraction and Separation - 2017Vasile AlexandraBelum ada peringkat
- Booklet English 2016Dokumen17 halamanBooklet English 2016Noranita ZakariaBelum ada peringkat
- CFC KIDS FOR CHRIST 2020 FINAL EXAMDokumen13 halamanCFC KIDS FOR CHRIST 2020 FINAL EXAMKaisser John Pura AcuñaBelum ada peringkat
- Viscosity IA - CHEMDokumen4 halamanViscosity IA - CHEMMatthew Cole50% (2)
- Captive Screws - Cap Head: Hex. SocketDokumen5 halamanCaptive Screws - Cap Head: Hex. SocketvikeshmBelum ada peringkat
- Advantages of Computerizing and Networking ComputersDokumen5 halamanAdvantages of Computerizing and Networking ComputersIn BioBelum ada peringkat
- Hazop Recommendation Checked by FlowserveDokumen2 halamanHazop Recommendation Checked by FlowserveKareem RasmyBelum ada peringkat
- Gizmotchy 3 Element Complete Assembly InstructionsDokumen5 halamanGizmotchy 3 Element Complete Assembly InstructionsEuropaBelum ada peringkat
- Black BeautyDokumen70 halamanBlack BeautyMeryem DevirgenBelum ada peringkat
- Film set safety rules for COVIDDokumen12 halamanFilm set safety rules for COVIDTanveer HossainBelum ada peringkat
- NCERT Solutions For Class 12 Flamingo English Lost SpringDokumen20 halamanNCERT Solutions For Class 12 Flamingo English Lost SpringHarsh solutions100% (1)
- Session CommandsDokumen1.033 halamanSession Commandshan seongBelum ada peringkat
- Schedule FinalDokumen6 halamanSchedule FinalJamora ManilynBelum ada peringkat
- Nurses Week Program InvitationDokumen2 halamanNurses Week Program InvitationBenilda TuanoBelum ada peringkat
- Sri Lanka, CBSLDokumen24 halamanSri Lanka, CBSLVyasIRMABelum ada peringkat
- Chapter 4Dokumen19 halamanChapter 4EyadBelum ada peringkat
- Fci FC CotsDokumen25 halamanFci FC CotsMatthew DuBelum ada peringkat