Anda mungkin juga menyukai
- Estimation 2 PDFDokumen44 halamanEstimation 2 PDFsamina butoolBelum ada peringkat
- Autocorrelation LTI SystemDokumen12 halamanAutocorrelation LTI Systemmadsud69Belum ada peringkat
- EECE 301 Note Set 18 CT Periodic Signal ResponseDokumen12 halamanEECE 301 Note Set 18 CT Periodic Signal ResponserodriguesvascoBelum ada peringkat
- Lecture 6 - Laplace TransformDokumen7 halamanLecture 6 - Laplace TransformSujeet SharmaBelum ada peringkat
- Transfer Functions: PrerequisitesDokumen12 halamanTransfer Functions: PrerequisitesthotalnBelum ada peringkat
- Digital Signal Processing Chapter 2 AnalysisDokumen22 halamanDigital Signal Processing Chapter 2 Analysismeseret sisayBelum ada peringkat
- DSC NptelDokumen6 halamanDSC NptelAli KamilBelum ada peringkat
- Time Domain Representation of Linear Time Invariant (LTI) SystemsDokumen54 halamanTime Domain Representation of Linear Time Invariant (LTI) SystemsLai Yon PengBelum ada peringkat
- Digital Control Systems z-Transform AnalysisDokumen22 halamanDigital Control Systems z-Transform Analysisvignanaraj100% (1)
- Discrete Time Observers and LQG Control: Massachusetts Institute of Technology 2.151 Advanced System Dynamics and ControlDokumen8 halamanDiscrete Time Observers and LQG Control: Massachusetts Institute of Technology 2.151 Advanced System Dynamics and ControldanyetnBelum ada peringkat
- LS-convolution BasicDokumen5 halamanLS-convolution BasicnazmulBelum ada peringkat
- Reconstruction of Sampled Signals Using Zero-Order HoldDokumen33 halamanReconstruction of Sampled Signals Using Zero-Order HoldashammoudaBelum ada peringkat
- EEM 342 Fundamentals of Control Systems: Notes For Week 13: Discrete-Time SystemsDokumen40 halamanEEM 342 Fundamentals of Control Systems: Notes For Week 13: Discrete-Time Systemscode w -denBelum ada peringkat
- Sequential CircuitsDokumen11 halamanSequential CircuitsGoutham RamakrishnanBelum ada peringkat
- The Spectral Gap and Rates of Convergence for Markov ChainsDokumen6 halamanThe Spectral Gap and Rates of Convergence for Markov Chainssemselvan794694Belum ada peringkat
- LS102: Linear Time-Invariant SystemsDokumen8 halamanLS102: Linear Time-Invariant SystemsBayar JargalBelum ada peringkat
- Assignment 2Dokumen3 halamanAssignment 2phatctBelum ada peringkat
- 13 Time Dependent Perturbation TheoryDokumen9 halaman13 Time Dependent Perturbation TheoryMohsin MuhammadBelum ada peringkat
- LAB 5 Matlab PDFDokumen14 halamanLAB 5 Matlab PDFM AzeemBelum ada peringkat
- ELE 301, Fall 2010 Laboratory No. 7 Stability and Root Locus PlotsDokumen4 halamanELE 301, Fall 2010 Laboratory No. 7 Stability and Root Locus PlotsAnonymous WkbmWCa8MBelum ada peringkat
- Tutorial KFDokumen13 halamanTutorial KFkidusBelum ada peringkat
- :: نشكيس يزاجح دمحم ريمس دمحم مسلاا 2 Observer state feedbackDokumen7 halaman:: نشكيس يزاجح دمحم ريمس دمحم مسلاا 2 Observer state feedbackmohamed samierBelum ada peringkat
- Transfer Function - by AnalogyDokumen22 halamanTransfer Function - by AnalogyMohd Ridzuan AhmadBelum ada peringkat
- Signals and Systems Assignment Questions on Even and Odd Signals, Periodic Signals, Fourier AnalysisDokumen14 halamanSignals and Systems Assignment Questions on Even and Odd Signals, Periodic Signals, Fourier AnalysisBlackArmy880% (1)
- Scumes Series BookDokumen10 halamanScumes Series BookSikandar KhanBelum ada peringkat
- Signals and Systems Lecture on Linear Time-Invariant SystemsDokumen30 halamanSignals and Systems Lecture on Linear Time-Invariant SystemsNouran YBelum ada peringkat
- Explaining Convolution Using MATLABDokumen10 halamanExplaining Convolution Using MATLABRupesh VermaBelum ada peringkat
- Ch6 Linear Systems ConvDokumen5 halamanCh6 Linear Systems ConvAbishekBelum ada peringkat
- A Signal Is Defined As Any Physical A Quantity That Vaies Witin TimeDokumen13 halamanA Signal Is Defined As Any Physical A Quantity That Vaies Witin Timeel09612033Belum ada peringkat
- Lacey Thacker TutorialDokumen10 halamanLacey Thacker TutorialWilliam Pinto HernándezBelum ada peringkat
- Exp No-04Dokumen3 halamanExp No-04Babu IslamBelum ada peringkat
- B.L - One-Dimensional Linear SystemsDokumen6 halamanB.L - One-Dimensional Linear SystemsPhysBaBelum ada peringkat
- Lab 04Dokumen7 halamanLab 04Sobia ShakeelBelum ada peringkat
- ECE 209: Circuits and Electronics Laboratory: Math Background: ODE's, LTI Systems, and Laplace TransformsDokumen4 halamanECE 209: Circuits and Electronics Laboratory: Math Background: ODE's, LTI Systems, and Laplace TransformsDavid TurnerBelum ada peringkat
- Linear Parameter-Varying Modeling and Control Synthesis MethodsDokumen20 halamanLinear Parameter-Varying Modeling and Control Synthesis MethodsBliColBelum ada peringkat
- Z TransformDokumen22 halamanZ TransformcivaasBelum ada peringkat
- Notes On Phasors: 1.1 Time-Harmonic Physical QuantitiesDokumen11 halamanNotes On Phasors: 1.1 Time-Harmonic Physical QuantitiesonezimocardosoBelum ada peringkat
- Kendall NumtreatDokumen12 halamanKendall NumtreatallinacBelum ada peringkat
- Robust Discrete-Time Chattering Free Sliding Mode Control: Goran Golo, Cedomir MilosavljevicDokumen10 halamanRobust Discrete-Time Chattering Free Sliding Mode Control: Goran Golo, Cedomir MilosavljevicdhineshpBelum ada peringkat
- : نشكيس يزاجح دمحم ر يمس دمحم: مسلاا 2 Observer state feedbackDokumen7 halaman: نشكيس يزاجح دمحم ر يمس دمحم: مسلاا 2 Observer state feedbackmohamed samierBelum ada peringkat
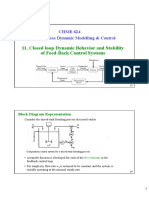
- Closed Loop Dynamic Behavior and Stability of Feed-Back Control SystemsDokumen21 halamanClosed Loop Dynamic Behavior and Stability of Feed-Back Control Systemsali aljifriBelum ada peringkat
- ConvolutionDokumen5 halamanConvolutionmohanBelum ada peringkat
- One Dimension Free Fermions Green's Function: Ext ExtDokumen6 halamanOne Dimension Free Fermions Green's Function: Ext ExtMatheus SchosslerBelum ada peringkat
- Convolution SumDokumen5 halamanConvolution SumAniket SankpalBelum ada peringkat
- Examples and Modeling of Switched and Impulsive SystemsDokumen19 halamanExamples and Modeling of Switched and Impulsive SystemsmorometedBelum ada peringkat
- LQG State Feedback Control of Multi-Rate Networked Control SystemsDokumen4 halamanLQG State Feedback Control of Multi-Rate Networked Control Systemspnkj232Belum ada peringkat
- EMT488/3 Digital Signal Processing Convolution and LTI SystemsDokumen23 halamanEMT488/3 Digital Signal Processing Convolution and LTI SystemsdemononesBelum ada peringkat
- MATLab Tutorial #5 PDFDokumen7 halamanMATLab Tutorial #5 PDFsatyamgovilla007_747Belum ada peringkat
- Symmetries and Conservation Laws ExplainedDokumen24 halamanSymmetries and Conservation Laws Explainedcifarha venantBelum ada peringkat
- Lecture 5 Discrete Time Systems NewDokumen53 halamanLecture 5 Discrete Time Systems NewSalman KhanBelum ada peringkat
- Control The World by Adding and Multiplying: Andres KwasinskiDokumen52 halamanControl The World by Adding and Multiplying: Andres Kwasinskiajeer_crlBelum ada peringkat
- Tutorial 1Dokumen12 halamanTutorial 1Beat Boy RkayBelum ada peringkat
- Dynamic Behavior of First - Second Order SystemsDokumen19 halamanDynamic Behavior of First - Second Order SystemsCuong TranBelum ada peringkat
- An Introduction To Queueing Theory: Many Customers Want To Use A Finite ResourceDokumen22 halamanAn Introduction To Queueing Theory: Many Customers Want To Use A Finite Resourceremya_392830015Belum ada peringkat
- Adaptive Reduced-Order Control of Discrete Repetitive Processes With Iteration-Varying Reference SignalsDokumen7 halamanAdaptive Reduced-Order Control of Discrete Repetitive Processes With Iteration-Varying Reference Signalssharifabd omarBelum ada peringkat
- Robust H∞ Controller Attenuates Construction Elevator VibrationsDokumen9 halamanRobust H∞ Controller Attenuates Construction Elevator VibrationsDr Saba TareqBelum ada peringkat
- Difference Equations in Normed Spaces: Stability and OscillationsDari EverandDifference Equations in Normed Spaces: Stability and OscillationsBelum ada peringkat
- Week02 Chapter 1three Phase SystemDokumen40 halamanWeek02 Chapter 1three Phase SystemAhmed AlkhamisyBelum ada peringkat
- Week06 Chapter 2 Electromagnetism and Magnetic CircuitDokumen13 halamanWeek06 Chapter 2 Electromagnetism and Magnetic CircuitAhmed AlkhamisyBelum ada peringkat
- Week06 Chapter 2 Electromagnetism and Magnetic CircuitDokumen13 halamanWeek06 Chapter 2 Electromagnetism and Magnetic CircuitAhmed AlkhamisyBelum ada peringkat
- Week05 Chapter 2 Electromagnetism and Magnetic CircuitDokumen25 halamanWeek05 Chapter 2 Electromagnetism and Magnetic CircuitAhmed AlkhamisyBelum ada peringkat
- Week 1 Chapter 1 Review Single Phase SystemDokumen47 halamanWeek 1 Chapter 1 Review Single Phase SystemAhmed AlkhamisyBelum ada peringkat
- Dajjal Islamic Urdu BookDokumen20 halamanDajjal Islamic Urdu Bookiqbal_islam92% (25)
- Concept of Electric FieldDokumen6 halamanConcept of Electric FieldAhmed AlkhamisyBelum ada peringkat
- Advanced Engineering Mathematics - K StroudDokumen1.057 halamanAdvanced Engineering Mathematics - K StroudEdward Begumanya Kabundu100% (7)
- SKEE 2742 Basic Electronics Lab: Experiment 2 BJT AmplifierDokumen4 halamanSKEE 2742 Basic Electronics Lab: Experiment 2 BJT AmplifierAhmed AlkhamisyBelum ada peringkat
- Week 1 Chapter 1 Review Single Phase SystemDokumen47 halamanWeek 1 Chapter 1 Review Single Phase SystemAhmed AlkhamisyBelum ada peringkat
- Convolution ExamplesDokumen12 halamanConvolution ExamplesGustxThavoxBelum ada peringkat
- Week07 Chapter 2 Electromagnetism and Magnetic CircuitDokumen15 halamanWeek07 Chapter 2 Electromagnetism and Magnetic CircuitAhmed AlkhamisyBelum ada peringkat
- Week02 Chapter 1three Phase SystemDokumen40 halamanWeek02 Chapter 1three Phase SystemAhmed AlkhamisyBelum ada peringkat
- Chapter 1: Introduction To Chapter 1: Introduction To: Computers and ProgrammingDokumen11 halamanChapter 1: Introduction To Chapter 1: Introduction To: Computers and ProgrammingAhmed AlkhamisyBelum ada peringkat
- Master StationDokumen138 halamanMaster StationWilmer Quishpe AndradeBelum ada peringkat
- VB 2Dokumen11 halamanVB 2Sudhir IkkeBelum ada peringkat
- PNW 0605Dokumen12 halamanPNW 0605sunf496Belum ada peringkat
- FOMRHI Quarterly: Ekna Dal CortivoDokumen52 halamanFOMRHI Quarterly: Ekna Dal CortivoGaetano PreviteraBelum ada peringkat
- Ultrasonic Inspection Standards for Wrought MetalsDokumen44 halamanUltrasonic Inspection Standards for Wrought Metalsdomsoneng100% (1)
- Keynes Presentation - FINALDokumen62 halamanKeynes Presentation - FINALFaith LuberasBelum ada peringkat
- Itec 3100 Student Response Lesson PlanDokumen3 halamanItec 3100 Student Response Lesson Planapi-346174835Belum ada peringkat
- HetNet Solution Helps Telcos Improve User Experience & RevenueDokumen60 halamanHetNet Solution Helps Telcos Improve User Experience & RevenuefarrukhmohammedBelum ada peringkat
- E200P Operation ManualDokumen26 halamanE200P Operation ManualsharmasourabhBelum ada peringkat
- Easyjet Group6Dokumen11 halamanEasyjet Group6Rishabh RakhechaBelum ada peringkat
- Continuous torque monitoring improves predictive maintenanceDokumen13 halamanContinuous torque monitoring improves predictive maintenancemlouredocasadoBelum ada peringkat
- Rtlo 18918B 1202Dokumen42 halamanRtlo 18918B 1202gustavomosqueraalbornozBelum ada peringkat
- Duct Design ChartDokumen7 halamanDuct Design ChartMohsen HassanBelum ada peringkat
- Cantilever Retaining Wall AnalysisDokumen7 halamanCantilever Retaining Wall AnalysisChub BokingoBelum ada peringkat
- CONFLICT ManagementDokumen56 halamanCONFLICT ManagementAhmer KhanBelum ada peringkat
- Responsibility Centres: Nature of Responsibility CentersDokumen13 halamanResponsibility Centres: Nature of Responsibility Centersmahesh19689Belum ada peringkat
- EDP/LRP Well Intervention System OverviewDokumen22 halamanEDP/LRP Well Intervention System OverviewJerome LIKIBIBelum ada peringkat
- Assignment 2 - p1 p2 p3Dokumen16 halamanAssignment 2 - p1 p2 p3api-31192579150% (2)
- Part 9. Wireless Communication Towers and Antennas 908.01 Purpose and IntentDokumen12 halamanPart 9. Wireless Communication Towers and Antennas 908.01 Purpose and IntentjosethompsonBelum ada peringkat
- Letter of Recommendation For Nicolas Hallett From Big Ten Network's Casey Peterson.Dokumen1 halamanLetter of Recommendation For Nicolas Hallett From Big Ten Network's Casey Peterson.Nic HallettBelum ada peringkat
- CLC Customer Info Update Form v3Dokumen1 halamanCLC Customer Info Update Form v3John Philip Repol LoberianoBelum ada peringkat
- Military Railway Unit Histories Held at MHIDokumen6 halamanMilitary Railway Unit Histories Held at MHINancyBelum ada peringkat
- Sample Contract Rates MerchantDokumen2 halamanSample Contract Rates MerchantAlan BimantaraBelum ada peringkat
- Evan Gray ResumeDokumen2 halamanEvan Gray Resumeapi-298878624Belum ada peringkat
- Business PlanDokumen9 halamanBusiness PlanRico DejesusBelum ada peringkat
- Personal InsuranceDokumen11 halamanPersonal InsuranceSumit Kumar SharmaBelum ada peringkat
- Ridge Regression: A Concise GuideDokumen132 halamanRidge Regression: A Concise GuideprinceBelum ada peringkat
- Congress Policy Brief - CoCoLevyFundsDokumen10 halamanCongress Policy Brief - CoCoLevyFundsKat DinglasanBelum ada peringkat
- Amended ComplaintDokumen38 halamanAmended ComplaintDeadspinBelum ada peringkat
- Process ValidationDokumen116 halamanProcess ValidationsamirneseemBelum ada peringkat