Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- EV100-200LX Controller and Handset TroubleshootingDokumen70 halamanEV100-200LX Controller and Handset TroubleshootingTan Jai100% (2)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- "IOT Based Energy Meter": Major Project OnDokumen18 halaman"IOT Based Energy Meter": Major Project OnDebashishParida50% (2)
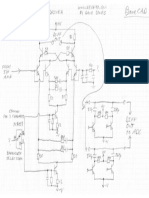
- Rigol DS1054Z Schematic DiffAmp PDFDokumen1 halamanRigol DS1054Z Schematic DiffAmp PDFArief Noor RahmanBelum ada peringkat
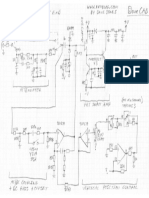
- Rigol DS1054Z Schematic FrontEndDokumen1 halamanRigol DS1054Z Schematic FrontEndArief Noor RahmanBelum ada peringkat
- White-Paper Peltiertechnik 02-2013 EDokumen15 halamanWhite-Paper Peltiertechnik 02-2013 EArief Noor RahmanBelum ada peringkat
- VLSI System Design For Automotive ControlDokumen7 halamanVLSI System Design For Automotive ControlArief Noor RahmanBelum ada peringkat
- 1996 CUG Presentation Nonblocking AssignsDokumen26 halaman1996 CUG Presentation Nonblocking AssignsArief Noor RahmanBelum ada peringkat
- l6561 PFC AnDokumen21 halamanl6561 PFC AnArief Noor RahmanBelum ada peringkat
- Comparative Analysis of Estimation Techniques of SFOC Induction Motor For Electric VehiclesDokumen6 halamanComparative Analysis of Estimation Techniques of SFOC Induction Motor For Electric VehiclesArief Noor RahmanBelum ada peringkat
- A New Model of The Double-Feed Induction Generator Wind TurbineDokumen7 halamanA New Model of The Double-Feed Induction Generator Wind TurbineArief Noor RahmanBelum ada peringkat
- Progress 3Dokumen5 halamanProgress 3Arief Noor RahmanBelum ada peringkat
- Back To Back ConverterDokumen114 halamanBack To Back ConverterMateo Jimenez CastañoBelum ada peringkat
- Modeling of Small Wind Turbines Based On PMSG With Diode Bridge For Sensorless Maximum Power Tracking PDFDokumen12 halamanModeling of Small Wind Turbines Based On PMSG With Diode Bridge For Sensorless Maximum Power Tracking PDFArief Noor RahmanBelum ada peringkat
- Modeling and Control of A Wind Turbine Driven Doubly Fed Induction GeneratorDokumen11 halamanModeling and Control of A Wind Turbine Driven Doubly Fed Induction GeneratorArief Noor RahmanBelum ada peringkat
- 3 How To Create The PartsDokumen47 halaman3 How To Create The PartsArief Noor RahmanBelum ada peringkat
- 2N2222 Transistor BJTDokumen2 halaman2N2222 Transistor BJTMauricioGSBelum ada peringkat
- 3 How To Create The PartsDokumen47 halaman3 How To Create The PartsArief Noor RahmanBelum ada peringkat
- WorkstationDokumen160 halamanWorkstationArief Noor RahmanBelum ada peringkat
- MPC of Condesate Distillation ColumnDokumen9 halamanMPC of Condesate Distillation ColumnArief Noor RahmanBelum ada peringkat
- Mec 2 Microprocesador ThomsonDokumen90 halamanMec 2 Microprocesador ThomsonNubia ArizaBelum ada peringkat
- 1yvs80015706 CV Ref611 VN-JP-R1Dokumen31 halaman1yvs80015706 CV Ref611 VN-JP-R1Trịnh Đức ThiệnBelum ada peringkat
- EEE - List of Seminar TopicsDokumen7 halamanEEE - List of Seminar TopicsKaustubhDabeerBelum ada peringkat
- Agilent E3632ADokumen107 halamanAgilent E3632ACtopherBelum ada peringkat
- 3886144Dokumen9 halaman3886144jesus silvaBelum ada peringkat
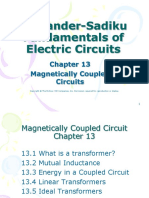
- AC CIRCUITS - Magnetic Coupled CircuitsDokumen19 halamanAC CIRCUITS - Magnetic Coupled CircuitsAhmad RafiqanTB0009Belum ada peringkat
- FS3Dokumen2 halamanFS3Trần Thanh TiếnBelum ada peringkat
- Matriculation Physics Alternating CurrentDokumen93 halamanMatriculation Physics Alternating CurrentJames LeeBelum ada peringkat
- Safety PrecautionsDokumen5 halamanSafety PrecautionsKiran SomanacheBelum ada peringkat
- Discrete Power Diodes and Thyristors: Data BookDokumen8 halamanDiscrete Power Diodes and Thyristors: Data Bookelectronpablo98Belum ada peringkat
- S2A F Datasheet en GBDokumen4 halamanS2A F Datasheet en GBAzhar AliBelum ada peringkat
- Unified Power Quality Conditioner in A Grid Connected Photovoltaic SystemDokumen11 halamanUnified Power Quality Conditioner in A Grid Connected Photovoltaic SystemPaolo ProspBelum ada peringkat
- Protection Basics and TerminologyDokumen33 halamanProtection Basics and TerminologyMuhammad AbuzarBelum ada peringkat
- User Manual: All Rights Reserved. Specifications Are Subject To Change Without NoticeDokumen28 halamanUser Manual: All Rights Reserved. Specifications Are Subject To Change Without Noticeahmad zahafizBelum ada peringkat
- Jump To Navigation Jump To Search: DIN 72552 Is ADokumen4 halamanJump To Navigation Jump To Search: DIN 72552 Is AAnonymous vMzbUJBelum ada peringkat
- Automatic Load Sharing of Transformer Using Micro-ControllerDokumen6 halamanAutomatic Load Sharing of Transformer Using Micro-ControllerSarang AbadagireBelum ada peringkat
- Eaton 9355 UPS: Scalable. Compact. FlexibleDokumen16 halamanEaton 9355 UPS: Scalable. Compact. FlexibleAldo Urrea PulgarBelum ada peringkat
- TI - 20181220 - SG3125HV-20 - Short-Circuit Current - V10 - ENDokumen3 halamanTI - 20181220 - SG3125HV-20 - Short-Circuit Current - V10 - ENcicm1993Belum ada peringkat
- Cost Data FY 2017-18Dokumen84 halamanCost Data FY 2017-18VELUBelum ada peringkat
- Rf-Kit Pa Controlboard2Dokumen6 halamanRf-Kit Pa Controlboard2Deni S TionoBelum ada peringkat
- Single Pole: Item Description Back To IndexDokumen1 halamanSingle Pole: Item Description Back To IndexAbdul RafaeBelum ada peringkat
- Martin M2K Repair and Replace Main PCBDokumen6 halamanMartin M2K Repair and Replace Main PCBlupteiBelum ada peringkat
- Current TransformerDokumen12 halamanCurrent TransformerSyed AbbasBelum ada peringkat
- Anit-Reverse: Current SolutionsDokumen6 halamanAnit-Reverse: Current SolutionsDan DepBelum ada peringkat
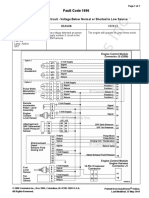
- 1696 Fault CodeDokumen3 halaman1696 Fault CodeDeva KoyriBelum ada peringkat
- Upgrading Substation Grounding SystemDokumen30 halamanUpgrading Substation Grounding SystemWonbae ChoiBelum ada peringkat
- 325bl y 325bln PDFDokumen2 halaman325bl y 325bln PDFMuriel Remberto100% (1)
- Case Study - Elsewedy Electric - 2 PDFDokumen4 halamanCase Study - Elsewedy Electric - 2 PDFThủy NguyễnBelum ada peringkat